起重机司机考试中定点停放数据结果采集实现方法的研究
2024-06-17孙良艳
孙良艳

摘要:为了提高起重机司机实操自动化考试评判的准确性、客观性和公正性,文中介绍了一种起重机司机实操自动化考试评分系统,着重对其中定点停放环节数据结果采集实现不同方式方法及工作原理进行说明,综合分析不同方式方法的优劣势,最终得出适合实际的最优实现方式,并对此方式实现的数学模型进行阐述,且提出优化思路。
关键词:起重机司机考试;定点停放;数据采集
Research on the Optimal Implementation Method for Data Acquisition in Designated Parking Locations During Crane Driver Exams
SUN Liangyan
(Fujian Special Equipment Inspection and Research Institute, Fuzhou 350008, Fujian, China)
Abstract: In order to improve the accuracy, objectivity, and impartiality of evaluating crane driver practical operation automation exams, this paper introduces a scoring system for the crane driver practical operation automation exam. The focus is on explaining the different methods and working principles for collecting data results in the fixed-point parking process. A comprehensive analysis of the advantages and disadvantages of each approach is conducted, ultimately leading to the identification of an optimal implementation method that is practical and efficient.. The mathematical model for implementing this method is explained, and optimization ideas are proposed.
Key Words: Crane driver exams; Parking at designated locations; Data acquisition
0引言
据市场监管总局统计,截至2022年底,全国起重机械数量达279.24万台,占特种设备总量14.28%,而起重机械事故在全国特种设备事故起数占比为23.15%,仅次于场(厂)内专用机动车辆。据不完全统计,因使用、管理不当发生事故,约占80%以上,作业人员操作能力为其中重要因素,操作水平考核为企业管理员工的重要一环。对于起重机械,具有司机室的起重机司机应持证上岗,起重机司机上岗证书取证分理论知识和实际操作技能(以下简称“实操”)考试。理论知识考试为机考。随着信息化等技术的发展,实操考试为避免人为因素影响,研发出一套实操自动化考试评分系统,将极大地提高考试评判的准确性、客观性和公正性。
1系统简介
本系统含身份证识别模块、考生人机交互模块、数据采集模块、数据分析模块、视频录制模块、数据存储模块和考试报告生成模块。整个系统根据考核大纲设置,学员用身份证进行人脸比对通过后领取考试触摸平板后考试。实操考试100分,各部分内容所占比例:部件识别占30%,基本操作能力占50%,应急处置能力占20%。单科成绩达到70分为合格;每科均合格,评定为考试合格;考试合格者即可获得上岗证书[1]。
起重机实操考试中部件识别考核考生现场作业识别能力:主要零部件和作业现场安全标志识别。考生在部件考核区进行作答,采用实物加图片的模式,考生在触摸平板上进行答题,系统根据选择或回答情况进行自动评分。
起重机实操考试中基本操作能力考核考生机构空载运行操作和机构带载运行操作。机构空载运行操作考核考生是否具备基本的操作能力。机构带载运行操作考核学员起吊一定的载荷,进行指定行程运行操作,并定点停放;操作过程要求“稳准快、安全合理”。考试过程有一票否决项:如未安全操作、不会空载运行操作和不听从指令等。考生在司机室进行操作,根据提示指令完成基本操作能力考核,系统实时分析收集到的数据并进行自动评分。
起重机实操考试中应急处置能力考核考生运行故障与异常情况的辨识、意外和事故的预发或处置等。考生在应急处置考核区进行作答,采用实物操作加图片的模式,考生在触摸平板上进行答题,系统根据选择或回答情况进行自动评分。
考试全程进行视频录像,考生一人一档,将全程的操作数据和视频、起重机空载和带载视频存入后方数据库。
2定点停放数据采集实现方法与工作原理[2]
实操自动化考试评分系统基本操作能力要求定点停放,现普遍定点停放考题为吊物(圆桶,D直径500mm)停于指定圈内,出内圈(D1直径600mm)、中圈(D2直径700mm)和外圈(D3直径800mm)相应的扣分[3]。实现方法有以下四种:
2.1 传感器检测方法
可采用压力传感器或遮挡式光电传感器作为现场采集用设备,通过吊物的停放位置获取压力信号或光电信号,并将压力信号或者光电信号输出为受压数据或遮挡数据,加以分析判断停放情况。采用压力传感器:设计一套钢结构装置,内圈与中圈、中圈与外圈、外圈外三个圆环,压力传感器置于圆环下,当圆桶压到响应的圆环,压力传感器将受压数据传于数据分析模块,即可判断停放情况。采用遮挡式光电传感器:常用方法将内圈、中圈和外圈留出凹槽,将此传感器圆形整圈布置,当圆桶将光电遮挡,数据传于数据分析模块,即可判断停放情况。[4]
2.2 激光测距检测方法
使用两套激光测距模组作为现场采集用设备,分别放置在指定位置并对准定点圆心。吊物上设置反射板,根据吊物在落地后的定点位置提取数据传送至上位机;通过上位机演算出吊桶圆心位置与底座圆心位置之间的距离,得出停放情况。同时,在吊物底部安装测距传感器,判断吊物的起升流程及高度是否按要求完成指定操作。
2.3 视觉处理分析方法
利用双工业摄像机作为现场采集用设备,分别安装在特定位置,将吊桶、底座喷涂上色差较大的不同颜色,利用颜色识别、边缘识别算法计算出吊桶实际放置位置圆心坐标,采用位置法和图像法进行分析,计算出吊桶圆心与底座圆心位置之间的距离。此方法将视觉信息进行数字化,并将整个考场物体设置在三维坐标中定义相关的误差数据,在进行数据识别时,根据吊物在停放过程中,构造的几何数学模型推断出定点和吊物的目标点与双目摄像头之间的位置,从而将整个过程中的目标运动均通过相对坐标来定制或传达到上位机,通过上位机采样分析计算得出停放情况。
2.4 北斗卫星定位方法
据北斗卫星导航系统官网文章,“在中国境内能够提供实时米级、分米级、厘米级和后处理毫米级高精度服务”,毫米级别定位服务用于民用适用于本系统。将圆心位置标定,圆桶圆心装配上北斗定位仪,根据两圆心距离即可判断结果。
3优劣势和具体实现模型
3.1 四种实现方式的优劣
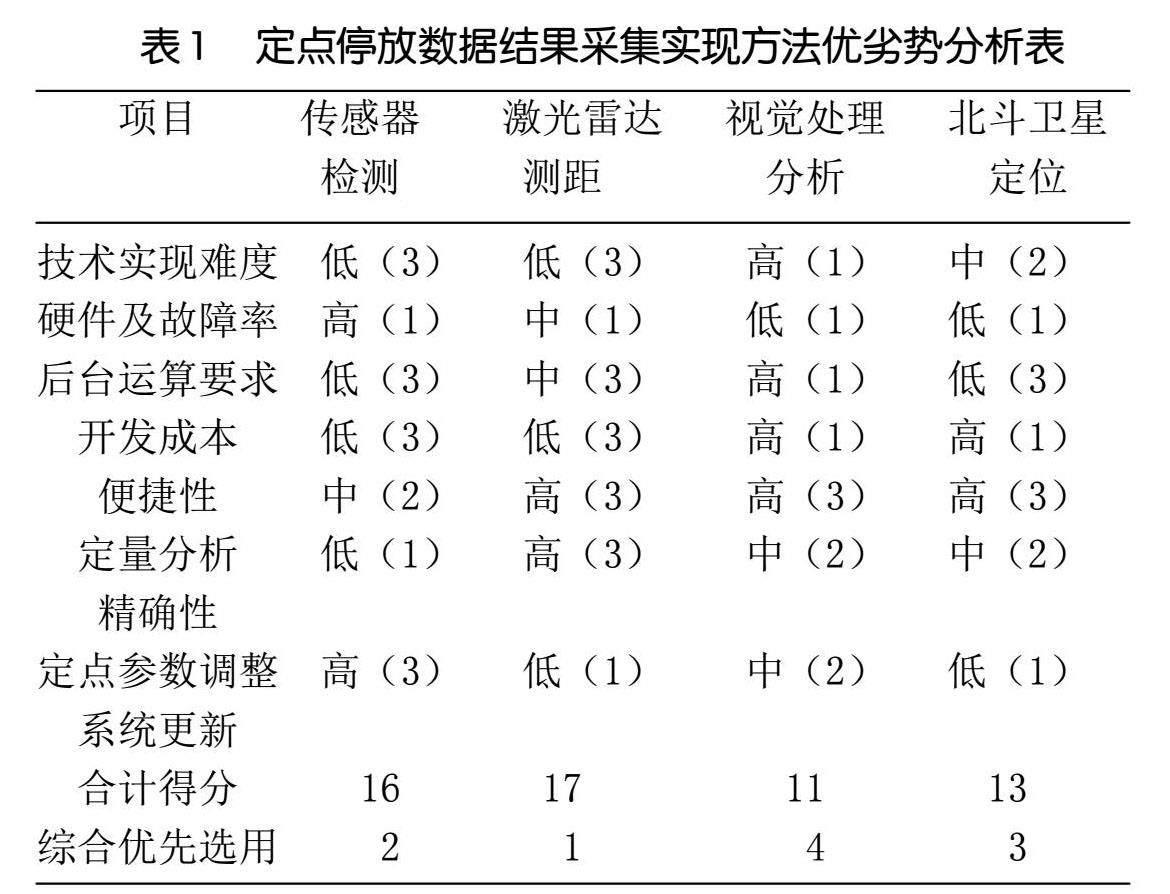
以上分析定点停放数据结果采集实现方法,在运用中根据实际情况进行取舍。基于当前科学技术发展和作者认知情况,对四种实现方法进行优劣势分析,详见表1,表中高中低指标为四种方法的相对值,并采用评分来进行综合判断。
综合以上分析,激光雷达测距作为定点停放数据结果采集实现方法。
3.2 基于激光雷达测距技术的数学模型
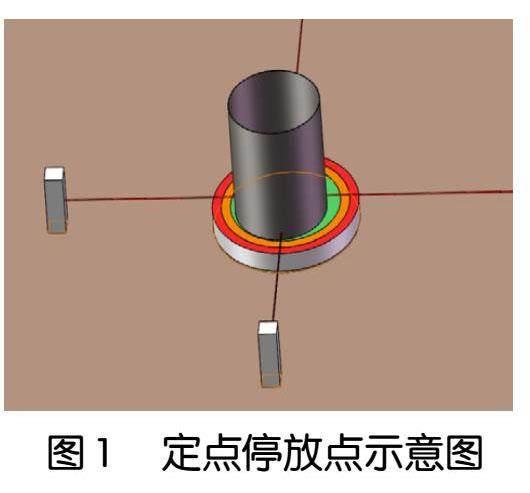
定点停放点如图1所示的方式摆放,在每个定点检测底座周围安装两个激光测距传感器,两个激光传感器以激光发出方向与地面平行,通过底座圆心垂直方向相交,两束激光形成90度夹角的布置方式,从而通过软件计算吊桶圆心位置。
数学模型如图2所示。
为方便布置,水平和垂直方向的激光传感器到同心的距离同时设为L(已知,也可根据现场情况将传感器的距离设为不同)。设圆桶圆心距定点停放点的圆心(两激光测距仪激光相交位置)距离X,则:。
K1和K2可由以下公式获得。
式中:D—圆桶直径(已知),mm;
K1—圆桶中心到停放点圆心水平方向的距离(未知),mm;
K2—圆桶中心到停放点圆心竖直方向的距离(未知),mm;
L1—水平激光到圆桶的距离(已知),mm;
L2—竖直激光到圆桶的距离(已知),mm。
判断,当X+D/2>D3,出外圈;当D2<X+
D/2<D3,出中圈;D1<X+D/2<D2,出内圈;X+D/2<D1,停放准确。现场实操案例如图3所示。
3.3激光测距方法的优化思路
通过对现场实物的部署与实现,激光测距方法达到了预期效果,也存在可优化部分:
1)快速安装优化。因以上是两激光测距垂直交汇,现场安装采用三角胶调平,并要核对是否交汇,消耗时间。修改建议,对激光支架进行优化,因考试现场基本平整,只要将激光仪固定微调水平,并可两固定仪器沿着中心拉一条线,线中一点通过定点圆心形成角度,即可安装完毕。
2)多定点停放点减少激光仪器使用,如三个定点位置采用3个激光测距仪,但因作者尚在研究中,数学模型未建立。
3)优化数学模型方式,使数据更少,更易管理。
4 结语
文中对起重机司机实操自动化考试评分系统中定点停放实现方式的研究,并给出最终方案,科研项目也产出结果。操作过程的安全监控和保护,考生的轨迹研究判断学员的掌握程度等内容,具有研究价值。
参考文献
[1]国家市场监督管理总局.特种设备作业人员考核规则:
TSGZ 6001-2019[S].2019,5(27).
[2]林健民.桥门式起重机作业人员实操考试自动评分
系统实现方法的研究[J].中国设备工程,2020,08(下):
246-247.
[3]黄剑.起重机电子信息化考试系统应用探索[J].
内燃机与配件,2016,10:47-49.
[4]熊治,张天勇,张桐,等.桥门式起重机考试自动评分系
统研究[J].现代工业经济和信息化,2018,15:62-64.
