甘薯裸苗斜插式栽植机构及电控系统研制
2024-06-17徐亚雷杨红光潘志国杨然兵李林张还
徐亚雷 杨红光 潘志国 杨然兵 李林 张还
摘要:针对目前我国甘薯裸苗移栽机存在的栽植质量差和自动化程度低的问题,按照甘薯裸苗移栽的农艺要求,研制一种基于四连杆机构原理的甘薯裸苗斜插式栽植机构及其控制系统。通过理论分析和仿真模拟研究栽植机构的运动轨迹,确定栽植机构的关键结构参数,构建由直流无刷电机、旋转编码器和PLC控制器等组成的栽植机构电控系统。田间试验表明:在目标株距20cm、作业速度0.4~0.6km/h时,移栽作业质量指标均达到标准要求,其中作业速度为0.4km/h时,作业性能优于0.5km/h和0.6km/h,此速度下株距变异系数均值为6.71%、栽植角度与深度合格率平均值分别为94.3%、95.0%。对比试验结果表明,0.4km/h、0.5km/h和0.6km/h速度下,电驱控制与传统机械控制相比,栽植株距变异系数平均值分别降低6.25%、6.37%和6.19%,可有效解决拖拉机动力输出轴驱动不稳定性对栽植作业轨迹和株距的影响。
关键词:甘薯;裸苗移栽;斜栽式;栽植轨迹;电控系统;四连杆机构
中图分类号:S223.93
文献标识码:A
文章编号:2095-5553 (2024) 06-0053-06
收稿日期:2022年11月1日
修回日期: 2023年4月18日
*基金项目:山东省农业重大应用技术创新项目(SD2019NJ009);青岛农业大学高层次人才科研基金(1116002)
第一作者:徐亚雷,男,1996年生,山东枣庄人,硕士研究生;研究方向为农业机械与装备。E-mail: yalei0109@163.com
通讯作者:张还,男,1974年生,济南人,博士,副教授;研究方向为智能农业机械与装备。E-mail: huan0804@163.com
Development of oblique-planting mechanism for sweet potato seedlings
and its electric control system
Xu Yalei1, Yang Hongguang2, Pan Zhiguo1, Yang Ranbing1, 3, Li Lin1, Zhang Huan1
(1. College of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao, 266109, China;
2. Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing,
210014, China; 3. College of Mechanical and Electrical Engineering, Hainan University, Haikou, 570228, China)
Abstract: Naked seedling transplanting is the main way of sweet potato cultivation, and planting operation is the key link of transplanting. Aiming at the problems of poor planting quality and low automation in planting machine of naked sweet potato seedlings in our country, according to the agronomic requirements for planting naked sweet potato seedlings in this study, a kind of oblique planting mechanism of naked sweet potato seedlings and its control system were developed based on the principle of four-link mechanism. The movement trajectory of the planting mechanism was studied by theoretical analysis and simulation, and the key structural parameters of the planting mechanism were determined. An electric control system of planting mechanism was constructed, which consisted of brushless DC motor, rotary encoder and PLC controller. Field experiments showed that when the target plant distance was 20 cm and the operating speed was 0.4-0.6 km/h, the operation quality index of transplanting reached the standard requirements. When the operating speed was 0.4 km/h, the operating performance was better than that of 0.5 km/h and 0.6 km/h. At this speed, the average coefficient of variation of plant distance was 6.71%, and the average passing rate of planting angle and depth were 94.3% and 95.0%, respectively. The comparative test results showed that compared with the traditional mechanical control, the electric drive control at 0.4 km/h, 0.5 km/h and 0.6 km/h speeds reduced the average coefficient of variation of plant distance by 6.25%, 6.37% and 6.19%, respectively, which could effectively solve the influence of the driving instability of the tractor power output shaft on the planting operation trajectory and plant distance.
Keywords: sweet potato; seedling transplanting; oblique-planting; planting track; electric control system; four-bar linkage
0 引言
甘薯作为一种重要的农产品和工业原料,在我国得到广泛的种植。由于甘薯属于异花授粉作物,有性繁殖过程复杂且产量低,而甘薯的营养器官具有较强的再生能力,因此在实际生产中用种薯培育甘薯秧苗,经剪苗后再通过裸苗移栽的方式得到广泛采用[1, 2]。
目前,国内外学者对甘薯裸苗移栽进行了研究。Yan等[3]设计了一种适用于甘薯平插种植农艺要求的裸苗移栽机。Liu等[4]设计了一种适用于甘薯船底型种植农艺要求的裸苗栽植机构。刘正铎等人设计了一种基于机械臂与深度学习的甘薯移栽机,可在移栽时出现漏苗现象时进行补栽作业。胡良龙等[5]设计了一种利用地轮驱动的链夹式甘薯移栽机,可实现斜插种植的轨迹要求,但需要更换齿轮改变传动比调节移栽株距。申屠留芳等[6]研究了指夹式栽植机构,并对关键部件的运动进行了轨迹仿真。另外日本研制的小型自走式甘薯移栽机,适用于需要膜上移栽的丘陵地区,但造价昂贵且作业效率不高。总体而言国内适用于甘薯斜插种植的机械仍然较少,且栽植机构也主要利用地轮或拖拉机输出轴驱动,存在地轮滑移和拖拉机输出轴转速与作业速度不匹配的问题,栽植质量无法得到有效保障。
为解决目前甘薯移栽机栽植质量差,主要栽植方式短缺的问题,基于四连杆机构原理设计斜插式甘薯裸苗栽植机构,可以较好完成甘薯苗斜插种植农艺要求,并利用电驱装置控制移栽作业,从而保持较高的移栽株距稳定性与栽植质量,以期为甘薯机械化种植与自能化发展奠定基础。
1 甘薯裸苗移栽方法及斜插式农艺要求
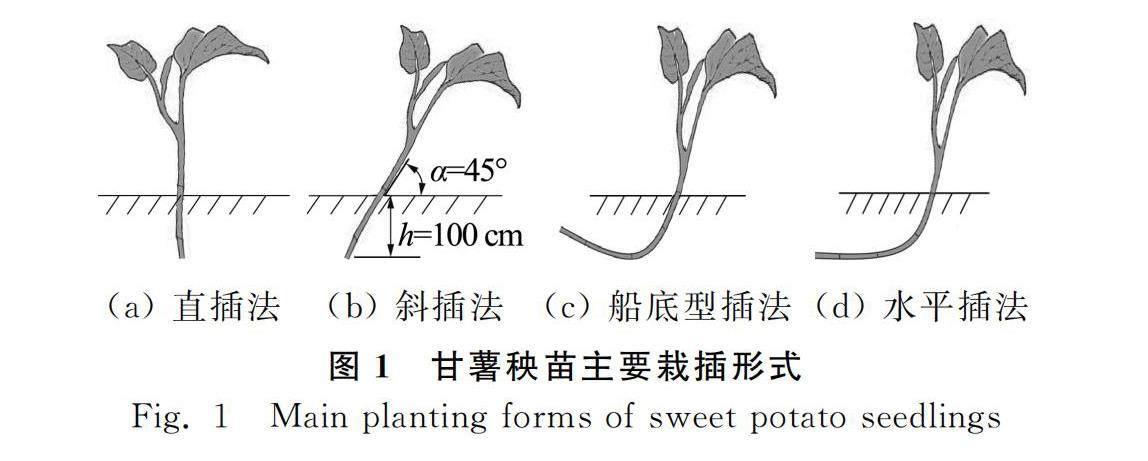
甘薯移栽工序复杂、农艺要求高。如图1所示,甘薯裸苗栽植方式主要有直插式、斜插式、船底型和水平栽插式。其中,斜插式有利于抗旱增产,是目前使用较多的一种甘薯裸苗移栽方式[7]。
如图1(b)所示,斜插法移栽是将甘薯苗倾斜插入土中,根据T/CAAMM 52—2020《甘薯复式栽植机》团体标准,斜插式主要农艺要求是栽植入土深度为10cm左右,薯苗斜度为45°左右(即是合格的“斜插法”)
2 甘薯裸苗斜插式栽植机构设计与轨迹分析
为实现斜插式栽植轨迹,如图2所示设计的栽植机构由夹取杆、受拉弹簧、凸轮、曲柄、摇杆、连杆等部分组成。曲柄、摇杆、连杆通过铰接的方式固定在机架板上构成四连杆机构,循环往复运动实现斜插种植轨迹要求。滚动轴承在凸轮上周向滚动,通过支点、弹簧、啮合残齿轮控制夹取杆的开合夹取甘薯秧苗。滚动轴承在凸轮上周向转动一圈,夹取手完成一个周期移栽动作。
栽植机构夹取爪尖的运动轨迹决定甘薯苗在垄体中的栽植形状。为实现斜插形移栽,栽植机构爪尖入土后的运动轨迹需倾斜向下。由于机具随拖拉机向前运动,因此栽植运动轨迹由机具的前进运动和夹取爪的回转运动合成[8],当机具在前进时,栽植机构各部分的运动轨迹如图3所示。
假设图3中杆件L1、L2、L3、L5长度和C点坐标(xc,yc)以及角度θ、φ1、φ2为已知量。
图3只为说明夹取爪尖端运动轨迹(夹苗点距夹取爪尖端的距离忽略不计,即夹取爪尖端运动轨迹即为甘薯苗栽插轨迹),因此将夹取机构简化为AE杆简要说明,可建立矢量方程
OA+AB=OC+CB
OE=OA+AE(1)
由式(1)建立夹苗点E点的位移方程
xA+L2cosφ2=xC+L3cosφ3
yA+L2sinφ2=yC+L3sinφ3(2)
xE=xA+L5cos(φ2+θ)
yE=yA+L5sin(φ2+θ)(3)
其中A点坐标
xA=L1cosφ1
yA=L1sinφ1(4)
求解位移方程
tanβ=yA-yCxA-xC(5)
在三角形ABC中,∠ACB=β-φ3,则
cos(β-φ3)=(xA-xC)2+(yA-yC)2+L23-L222L3(xA-xC)2+(yA-yC)2(6)
sinφ2=yC+L3sinφ3-yAL2(7)
综上可得φ2、φ3、xE、yE。
根据式(2)、式(3)对时间求导建立速度方程
xA′-L2φ2′sinφ2=0-L3φ3′sinφ3
yA′+L2φ2′cosφ2=0+L3φ3′cosφ3(8)
xE′=xA′-L5φ2′sin(φ2+θ)
yE′=yA′-L5φ2′cos(φ2+θ)(9)
xA′=-L1φ1′sinφ1
yA′=L1φ1′cosφ1(10)
求解速度方程
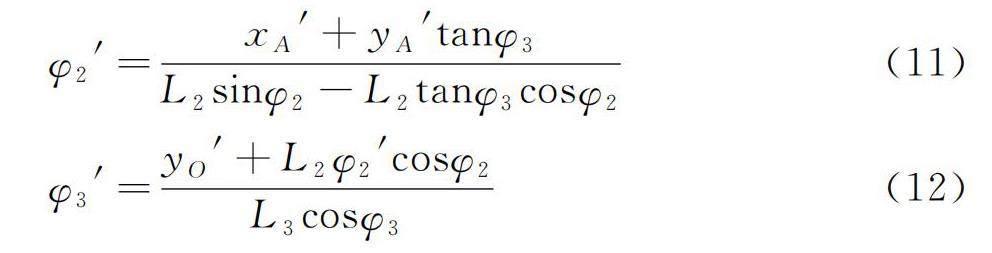
φ2′=xA′+yA′tanφ3L2sinφ2-L2tanφ3cosφ2(11)
φ3′=yO′+L2φ2′cosφ2L3cosφ3(12)
综合式(8)~式(12)可求得xE′、yE′。
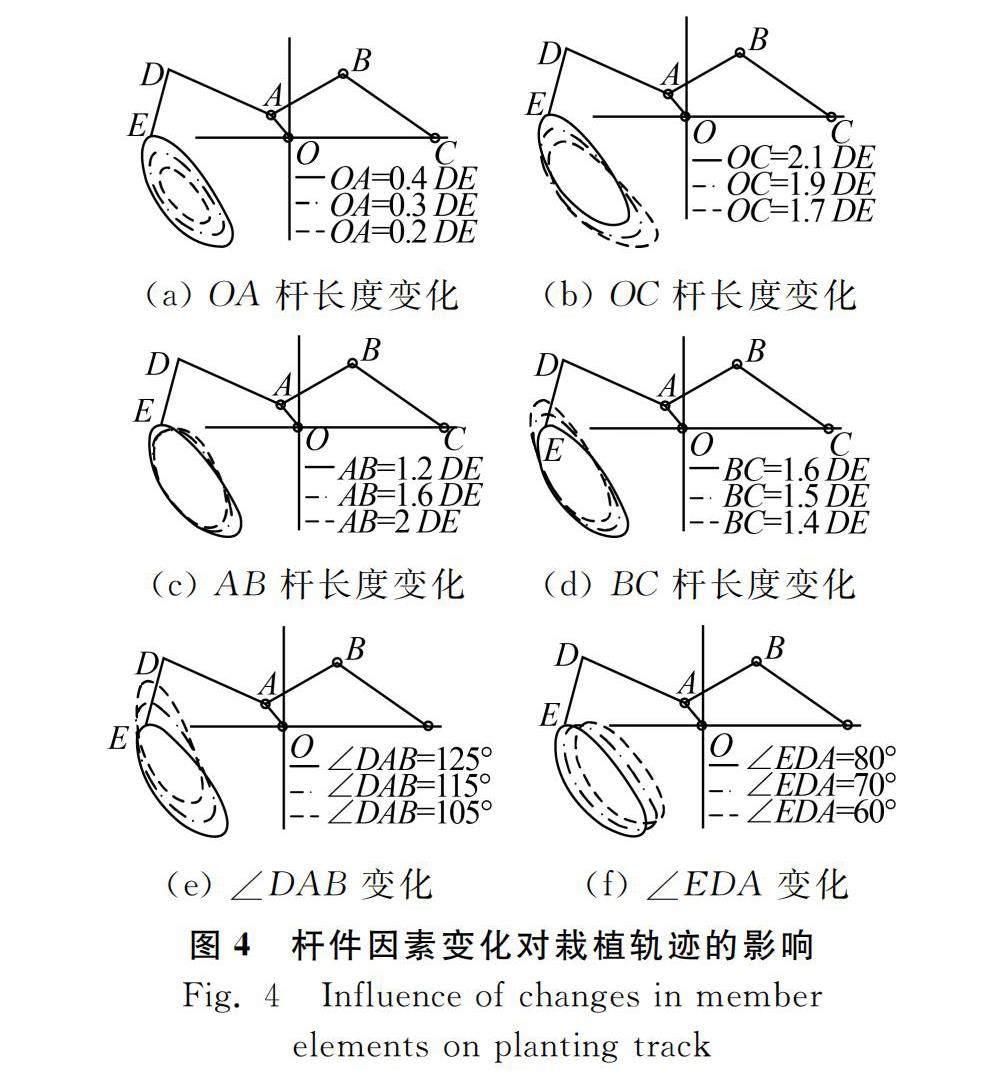
通过分析可知,栽植机构曲柄OA、连杆AB、摇杆BC和机架板OC长度以及连杆AB与夹取爪AE间的夹角等对栽植运动轨迹有重要影响。
假设夹取抓DE长度固定,分析四连杆机构各杆件长度与角度的变化对栽植轨迹的影响。如图4所示,杆OC、AB、BC的长度与角DAB的改变直接影响了栽植角度与深度的变化。此外,杆OA长度的变化对种植轨迹所围成的面积也有影响,而角EDA的变化对栽植轨迹影响较小。
根据编程页面调整四连杆机构参数,通过多组不同参数条件下的对比发现,当各杆件长度为OA∶OC∶AB∶BC∶AD∶DE=20∶105∶60∶80∶80∶60、∠EDA=80°、∠DAB=125°时,E点的运动轨迹可以较好满足T/CAAMM 52—2020《甘薯复式栽植机》团体标准对甘薯裸苗斜插式移植的农艺要求,其具体参数和轨迹如图5所示。
3 基于PLC的栽植机构电控系统设计
3.1 总体结构原理
如图6所示,甘薯裸苗栽植机构电控系统工作原理为利用旋转编码器实时检测地轮的行进速度,三菱FX3U系列PLC根据行进速度的变化实时调整电机的转速做随动控制,从而保证株距的稳定。
3.2 控制系统设计
试验选用M法测速,通过一定的时间周期Δt内,测量编码器输出的脉冲个数M1来计算速度[9],如式(13)所示。
v=πM1dP1Δt×103(13)
式中: v——编码器测得的作业速度,m/s;
M1——时间间隔内测得的脉冲总数;
P1——地轮旋转编码器每转一圈发出的脉冲;
Δt——选取的时间周期,ms;
d——地轮直径,m。
作业距离和作业时间、拖拉机前进速度的关系为
Δs=v×ΔT(14)
式中: ΔT——任意作业时间间隔,s;
Δs——ΔT时间内作业距离,m。
由于齿轮带动夹取手运动,且齿轮转动一圈夹取手栽植一次,因此作业距离和作业时间、理论移栽电机转速、预设株距的关系式为
Δs=N160i1i2lΔT100(15)
式中: N1——理论移栽电机转速,r/min;
l——预设株距,cm;
i1——电机减速器传动比,取i1=5;
i2——夹取手齿轮传动比,取i2=2.5。
综合式(14)和式(15)可得,某时刻作业速度和理论移栽驱动电机转速N1的关系为
N1=6 000i1i2lv(16)
控制器模拟量电压输出与移栽电机转速关系,采用现场试验标定并拟合曲线的方法[10]。通过试验设定不同的模拟量电压输出同时测量相应的电机转速,利用Matlab & Curve Fitting工具箱进行数据拟合,其方程和拟合度如图7所示。
株距设置完成后,控制器通过作业速度与移栽电机转速之间的函数关系计算理论电机转速,并通过电压—转速拟合曲线方程,计算理论模拟电压输出控制电机转动,依据电机实际转速与理论转速差值,作为参数自适应PID控制的反馈信号,闭环式控制移栽电机实时转速。其控制系统结构如图8所示。
为了提高控制系统的稳定性,电机理论转速N1允许范围为(N1±0.05N1),当实际转速N>1.05N1或N<1.05N1时,认为不满足理论转速界限,并利用参数自适应PID进行修正,直至恢复到误差允许范围内,当检测的电机转速误差在允许范围之内,直流电机转速维持不变。
4 田间性能试验
4.1 试验仪器与条件
试验仪器主要有土壤水分仪、硬度测量仪、游标卡尺、卷尺、量角器、计数器和研制的甘薯裸苗斜插式移栽机构及其电控系统。如图9所示,将研制的甘薯裸苗斜插式移栽机构及电控系统安装在合作单位生产的甘薯裸苗移栽机上。
该机主要由旋耕机构、起垄机构、覆膜机构、覆土机构、甘薯裸苗斜插式移栽机构及其电控系统等组成。其主要作业参数如表1所示。
试验在山东青州甘薯种植基地进行,试验地土质为壤土、平均含水率16.3%、坚实度210kPa。试验用甘薯苗品种为烟薯25号,苗龄均为35d,单株长度为20~25cm,距离苗根部30mm处的平均直径为4.28mm。试验前用旋耕机旋耕一遍。采用垄作不覆膜种植,起垄高度260mm,垄距为900mm,株距设置为20cm。
4.2 栽植机构及电控系统性能试验
为验证设计的斜插式栽植机构及其电控系统的栽植质量是否符合要求。利用加装斜插式栽植机构及电控系统的甘薯移栽机进行试验。试验时控制车速分别处于0.4km/h、0.5km/h和0.6km/h三个速度。不同速度下各栽植100棵,重复3次,对种植后的立苗角度合格率、栽插深度合格率两个农艺指标以及漏栽率、株距变异系数进行分析。为排除甘薯秧苗形态大小对试验结果的影响,试验所用甘薯秧苗在每个速度区间内重复使用。同时,为保证测区内拖拉机速度的精确,在试验区域前后预留出供拖拉机加减速的足够距离。参考T/CAAMM 52—2020《甘薯复式栽植机》,移栽深度合格指标为4~10cm,移栽角度合格指标为45°±3°。试验结果如表2所示。
由表2分析可得,随着作业速度的提高,栽植角度合格率和栽植深度合格率均值降低,漏栽率增加,但总体变化幅度不大。作业速度0.4km/h时,作业性能优于0.5km/h和0.6km/h,此作业速度下的移栽株距变异系数平均值为6.71%、栽植角度合格率平均值为94.3%、栽植深度合格率平均值为95.0%、漏栽率平均值为2.0%。3种作业速度下株距变异系数与漏栽率最大值分别为7.96%、4%,满足甘薯裸苗移栽的要求。
4.3 株距控制稳定性对比试验
为进一步检验设计的电控系统在甘薯裸苗移栽时株距控制稳定性方面的性能,开展与传统利用拖拉机后输出轴驱动的栽植性能对比试验。栽植机构用拖拉机后输出轴驱动在0.4km/h、0.5km/h和0.6km/h,3种速度下各栽植100株甘薯秧苗同时测出移栽株距。并与4.2节试验中的第1次试验株距测量值进行对比。
图11为3种速度下两种移栽控制方式的株距测量数据。可以看出,电控调节方式下的移栽株距在设定值处小范围上下浮动,而拖拉机输出轴控制传动的方式株距值波动明显,且随着作业速度的增加移栽株距有明显增大的趋势。
从表3可以看出随着速度的提升,拖拉机后输出轴传动的控制方式移栽平均株距由18.0cm增加至21.2cm,移栽株距受作业速度影响较大,而电控方式株距平均值变化不大。分析标准差与变异系数可知拖拉机后输出轴传动的方式,标准差最大值为3.0,变异系数最大为14.15%,且3种速度下标准差与株距变异系数明显大于电控调节的方式,这体现了电控调节的优势。
5 结论
1) 基于甘薯斜插种植农艺要求,设计一种基于四连杆机构原理的栽植机构。通过对移栽钳夹运动轨迹分析和移栽轨迹仿真,确定四连杆各杆件最佳结构参数,可较好满足甘薯斜插种植农艺要求。
2) 本文设计基于旋转编码器测速的移栽随动控制系统,实现移栽株距稳定、可调。田间试验表明,设计的电驱式甘薯移栽机构,按所设定的移栽株距工作时,移栽株距平均变异系数为7.30%,最大变异系数为7.96%。与传统拖拉机输出轴驱动相比具有较好的株距稳定性。
参 考 文 献
[1]赵海, 刘新鑫, 潘志国, 等. 甘薯种植农艺及机械化种植技术研究[J]. 中国农机化学报, 2021, 42(6): 21-26.
Zhao Hai, Liu Xinxin, Pan Zhiguo, et al. Agronomic characteristics and mechanized planting technology of sweet potato [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 21-26.
[2]范泽民, 陈卫, 刘新亮, 等. 压苗式甘薯移栽机研制探讨[J]. 中国农机化学报, 2018, 39(11): 1-3.
Fan Zemin, Chen Wei, Liu Xinliang, et al. Discussion on transplanting machine of sweet potato by pressurizing seedlings [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(11): 1-3, 16.
[3]Yan W, Hu M J, Li K, et al. Design and experiment of horizontal transplanter for sweet potato seedlings [J]. Agriculture, 2022, 12(5): 675.
[4]Liu Z D, Wang X, Zheng W X, et al. Design of a sweet potato transplanter based on a robot arm [J]. Applied Sciences, 2021, 11(19): 9349.
[5]胡良龙, 王冰, 王公仆, 等. 2ZGF-2型甘薯复式栽植机的设计与试验[J]. 农业工程学报, 2016, 32(10): 8-16.
Hu Lianglong, Wang Bing, Wang Gongpu, et al. Design and experiment of type 2ZGF-2 duplex sweet potato transplanter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(10): 8-16.
[6]申屠留芳, 唐立杰, 孙星钊, 等. 指夹式甘薯移栽机栽植机构的设计与仿真[J]. 江苏农业科学, 2018, 46(14): 223-226.
Shentu Liufang, Tang Lijie, Sun Xingzhao, et al. Design and simulation of planting mechanism of finger clip sweet potato transplanting machine [J]. Jiangsu Agricultural Sciences, 2018, 46 (14): 223-226.
[7]庄如月. 甘薯裸苗移栽机构优化设计与试验研究[D]. 杭州: 浙江理工大学, 2021.
Zhuang Ruyue. Optimization design and experimental study on transplanting mechanism of sweet potato seed seedlings [D]. Hangzhou: Zhejiang University of Technology, 2021.
[8]王大同. 卧式输送带式甘薯移栽机的设计[D]. 武汉: 华中农业大学, 2017.
Wang Datong. Design of horizontal conveyor belt sweet potato transplanting machine [D]. Wuhan: Huazhong Agricultural University, 2017
[9]丁友强, 杨丽, 张东兴, 等. 基于GPS测速的电驱式玉米精量播种机控制系统[J]. 农业机械学报, 2018, 49(8): 42-49.
Ding Youqiang, Yang Li, Zhang Dongxing, et al. Control system of motor-driving maize precision planter based on GPS speed measurement [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49 (8): 42-49.
[10]高原源, 王秀, 杨硕, 等. 播种机气动式下压力控制系统设计与试验[J]. 农业机械学报, 2019, 50(7): 19-29.
Gao Yuanyuan, Wang Xiu, Yang Shuo, et al. Design and test of pneumatic downforce control system for planting [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50 (7): 19-29.