力位综合系数调节方法研究
2024-06-17付晓徐锐良闫祥海徐立友
付晓 徐锐良 闫祥海 徐立友
摘要:针对力位综合调节中综合系数的取值问题,提出一种综合系数自动调节方案。通过Matlab/simulink研究不同耕作条件下综合系数与耕深的关系,依据结果建立以耕作阻力为开关的调节方法;并基于牵引阻力的计算公式设计模拟耕作阻力波动的随机信号模块。为验证所设计综合系数调节方法的控制效果,采用综合系数取值0.5的耕深控制策略与其进行仿真对比。结果表明:该方案能够随着耕作阻力的改变及时地对综合系数进行调整,具有较好的环境适应性,最大超调量相较于另一调节方案同比降低75.56%;保证耕深在合理范围的同时兼顾发动机负荷稳定性。
关键词:力位综合调节;综合系数;耕作阻力;牵引阻力;耕深均匀;自动控制
中图分类号:S219.032.4
文献标识码:A
文章编号:2095-5553 (2024) 06-0037-05
收稿日期:2022年8月16日
修回日期:2022年10月17日
*基金项目:河南省科技攻关项目(212102210328)
第一作者:付晓,女,1998年生,河南洛阳人,硕士研究生;研究方向为拖拉机耕深控制。E-mail: 1286583906@qq.com
通讯作者:徐锐良,男,1966年生,河南洛阳人,副教授,硕导;研究方向为车辆设计与制造。E-mail: lyxrl@163.com
Study on adjustment method of force-position comprehensive coefficient
Fu Xiao, Xu Ruiliang, Yan Xianghai, Xu Liyou
(College of Vehicle and Traffic Engineering, Henan University of Science and Technology, Luoyang, 471000, China)
Abstract: Aiming at the problem of the value of comprehensive coefficient in comprehensive adjustment of force position, an automatic adjustment scheme of comprehensive coefficient was proposed. The relationship between comprehensive coefficient and tillage depth under different tillage conditions was studied by Matlab/simulink. According to the results, the regulation method with tillage resistance as switch was established. Based on the formula of traction resistance, a random signal module was designed to simulate the fluctuation of tillage resistance. In order to verify the control effect of the designed comprehensive coefficient adjustment method, the tillage depth control strategy with the comprehensive coefficient of 0.5 was used for simulation comparison. The results show that the scheme can adjust the comprehensive coefficient in time with the change of tillage resistance, and has good environmental adaptability. The maximum overshoot is reduced by 75.56% compared with the other scheme. The stability of engine load is also taken into account while the ploughing depth is in a reasonable range.
Keywords: comprehensive adjustment of force and position; comprehensive coefficient; tillage resistance; tractive resistance; even tillage depth; automatic control
0 引言
由于农机作业环境的复杂多变性,传统的机械式液压悬挂系统已无法满足农业现代化需求,电液悬挂控制技术应运而生。相比于传统的悬挂系统,电液悬挂系统的耕深控制方式更加灵活,PID控制、模糊控制、神经网络等控制算法也开始应用于控制系统,耕深的控制精度和系统响应速度都有了很大提升[1, 2]。在针对力位综合调节的研究中,综合系数大多是由人工预先设定,探讨不同综合系数时系统的耕深控制性能[3]。近些年,也有学者研究了综合系数的自动控制算法,席鑫鑫等建立了力位综合控制的数学模型,结合BP神经网络设计了综合度系数的自动选取系统;但是目前对神经网络期望值的预测及算法应用都还不够成熟。王素玉等[4]研究了综合系数与土壤比阻之间的关系,基于土壤比阻与综合系数的关系取值算法,实现了综合系数的自动控制,然而在耕深均匀性上表现欠佳,仍有提升的空间。
本文在已有研究的基础上,搭建拖拉机电液悬挂系统的仿真模型,探索综合系数取值与耕作阻力之间的关系,设计自调节综合系数的力位综合控制策略(以下简称阻力式自调节系数法),并将其与综合系数采用固定值的力位综合调节进行对比分析。
1 调节原理及控制策略
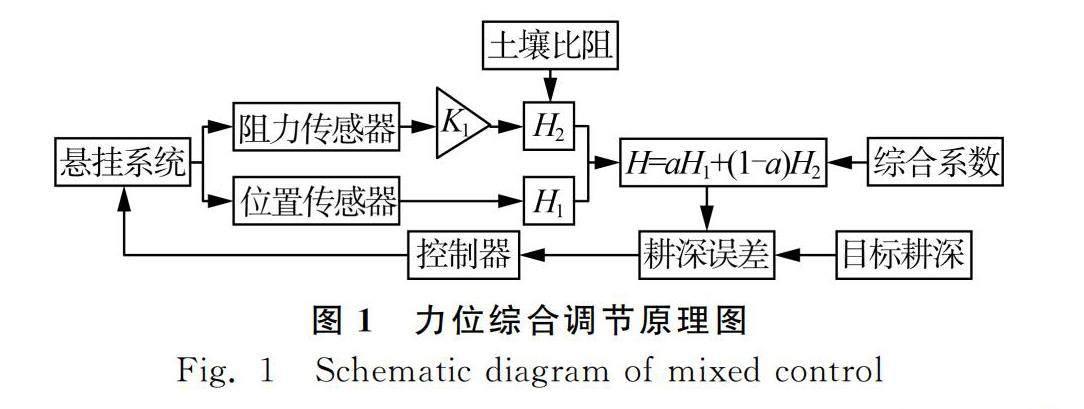
1.1 调节原理
悬挂系统力位综合调节原理简图如图1所示。目标耕深由驾驶员输入,K1为常数项;力、位传感器检测信号进行处理后得到对应耕深H2、H1,结合综合系数a计算得到实际耕深,将其与目标耕深对比后产生耕深误差,耕深误差输入控制器经判断后输出控制信号,从而控制悬挂系统令农具执行升降动作。综合系数定义为位调节占力位综合调节的比重,可以通过设定处于0~1之间的任何位置,代表了位调节在综合调节中分配的比例[5]。位调节占比较大时可以获得较好的耕深一致性,力调节占比较大时可以获得较好的负荷稳定性,因此合理的设定综合系数值对力位综合调节具有重要意义。
1.2 控制策略
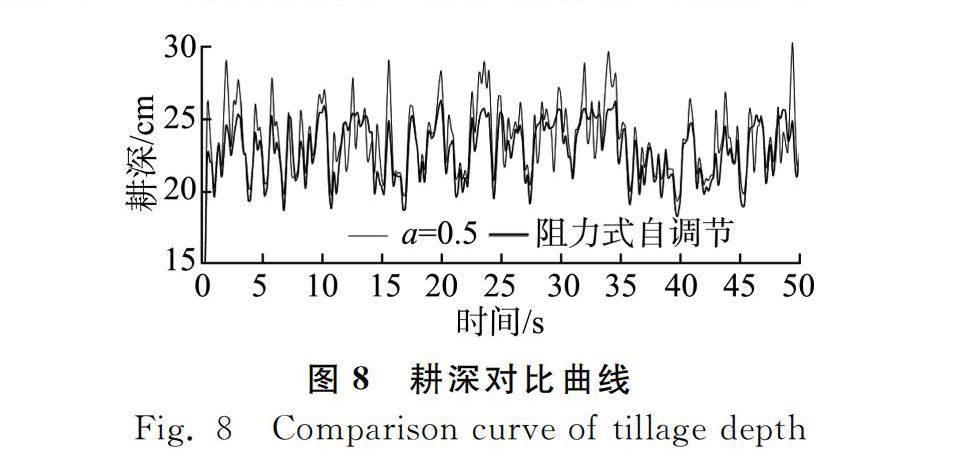
拖拉机悬挂系统在耕作过程受耕作环境和系统本身的影响,具有时变、扰动大、非线性强的特点,基于此本文选用模糊-PID控制器对悬挂系统进行耕深控制。模糊控制器采用双输入三输出的模式,输入为耕深误差e及误差变化率ec,输出为PID的参数修正量Kp、Ki、Kd,输入输出的量化等级为7,离散论域均取为[-6,6],对应的模糊子集取为{NB,NM,NS,Z,PS,PM,PB}。
隶属度函数曲线的形状对模糊控制器的控制性能具有一定的影响。当输入偏差波动较大时高斯函数对应的曲线调节较快效果较好,反之三角型曲线对应的调节较快、效果好一些[6];非均匀分布的隶属度函数可以提高系统的抗干扰能力和输出量的控制作用,达到快速控制系统偏差的目的[7-10],因此采用隶属度函数如图2和图3所示。模糊控制规则是根据专家经验和知识生成的,结合自整定原则[11, 12],建立的模糊控制规则如表1所示。
2 综合系数与耕作阻力关系分析
2.1 模型搭建
拖拉机耕作区域相对灵活,在土地规模化经营的趋势下,跨区作业将成为未来耕作模式的新常态。跨区作业就涉及耕作阻力的改变,为保证得到适合农作物生长的耕深,综合系数应该能够随作业条件的改变进行调整。考虑到耕作阻力主要与农具参数、土壤、耕深有关;而农具参数为定值,只与制造有关,耕深为目标量,土壤的情况通常用土壤比阻来反映;因此基于研究土壤比阻与综合系数间的关系设计阻力式自动调节综合系数方法是可行的。为得到更为直观的结果,假设在某一耕作环境时土壤比阻固定,悬挂模型采用传递函数的形式。前文已经对力位综合调节原理及控制策略进行了阐述,结合建立的悬挂系统的数学模型,在Matlab/simulink中搭建的控制系统模型如图4所示。图中a、k分别代表综合系数、土壤比阻。
2.2 仿真分析
已知综合系数的取值范围为0~1,为了分析综合系数与土壤比阻的关系,应对土壤比阻的取值范围进行限定。文献[13]对不同的土壤数据进行采集并得到了相应的土壤比阻值,据此本文选取土壤比阻分别为25kN/m2、35kN/m2、45kN/m2、55kN/m2、65kN/m2、75kN/m2。在模型中设定综合系数后对土壤比阻进行调整,得到了耕深响应曲线,选择较有代表性的综合系数分别为0.9与0.5时的曲线如图5、图6所示。
由图5和图6可知所设计模糊-PID控制策略的响应速度较好,均在1s内达到了稳定耕深,基本无超调。当土壤比阻较大时,若综合系数选取不合适则耕深无法满足作业要求,但综合系数偏大可能会导致耕作阻力波动大,发动机负荷不稳定,甚至损伤发动机;因此在设计阻力式自调节系数法时应在符合发动机负荷的情况下尽量选用较大的综合系数以保证耕深。
2.3 调整方案的设计
综合系数的取值与耕作阻力之间的对应关系越精细,相应的耕深的控制效果越好,但是会提高系统响应时间;当耕作阻力较小时,综合系数的取值在较大范围都可以符合耕深要求,所以可以适当减少综合系数的划分等级,以考虑响应速度;当耕作阻力处于波动较大的区间时增加一个综合系数取值,可以避免耕深产生较大波动。结合仿真结果以及文献[4]对土壤比阻与综合系数范围关系的研究,制订出综合系数与耕作阻力之间的关系如表2所示。
依据综合系数与阻力之间的关系在Matlab里设计出阻力式自调节系数法模块后,为确保能根据耕作阻力输出相应的综合系数,对其进行了简单的验证。采用如图7(a)所示的随机信号模拟耕作阻力的改变,仿真6s后得到如图7(b)所示的输出信号。
3 试验验证
通过固定土壤比阻k的取值对综合系数与阻力的关系进行了研究,然而在农耕作业过程中不同地区的土壤是存在差异的,因此设计了随机信号以对土壤情况的变化进行模拟。拖拉机作业时农具受到的平均牵引阻力可以按照式(1)计算[14, 15],其中b与Z之积为拖拉机的作业幅宽,取为2m;不同的耕地土壤比阻k的波动范围一般在25~75kN/m2。
PT=k·b·H·Z(1)
式中: b——单个铧犁体宽度,cm;
H——耕深,cm;
Z——铧犁数。
若直接以随机信号的输出模拟耕作阻力波动,就无法较好地反映耕作阻力与当前耕深之间存在的关系;因此假定作业幅宽与土壤比阻的乘积为系数K,结合对作业幅宽与土壤比阻的分析,可以得到K数值变化范围为50~150;由于土壤比阻只与土壤有关,则牵引阻力与耕深之间就可以近似为线性的关系。采用随机信号对系数K进行输出,牵引阻力就表示为当前耕深与系数K的乘积,既可以用随机数表达土壤的不规则变化,也兼顾了耕作阻力与当前耕深之间的关系。
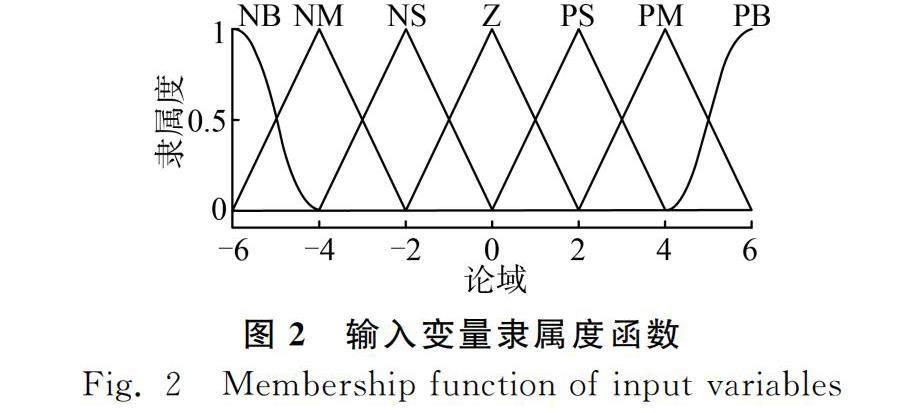
在Matlab/Simulink中搭建新的仿真模型,同时设计相应的综合系数取值为0.5的模型作为对比,运行仿真50s,得到如图8所示的耕深变化曲线。
由图8可知,无论是阻力式自调节还是综合系数取固定值0.5的耕深控制方案所达到的耕深主要在20~25cm范围浮动;阻力式自调节的最大、最小耕深分别为26.3cm、16.8cm,a=0.5的调节方案的最大、最小耕深分别为30.3cm、18.2cm,由于仿真时针对土壤环境变化采用随机信号输出,其输出值在大幅度波动时产生了耕深的超调;阻力式自调节、a=0.5调节方案的平均耕深分别为22.4cm、23.1cm,总体符合翻耕的耕深要求,且控制系统能较快地做出响应。
当耕作阻力较小,a=0.5的调节由于无法调整力、位调节所占的比例,产生了较大的耕深误差,而阻力式自调节系统通过输出较大的综合系数将耕深稳定在25cm附近,最大超调量相较于a=0.5的调节方案同比降低75.56%;当耕作阻力适中时,由于阻力式自调节的本质也是对综合系数的调整,此时控制系统输出的综合系数值也趋近于0.5,故两种方案的耕深控制效果接近一致;当耕作阻力较大时,阻力式自调节方法的耕深下降量较a=0.5的调节更大一些,但是考虑到发动机的负荷工况,在耕深允许范围内牺牲部分耕深,以保证阻力不会过大而损伤发动机也是可以接受的。
4 结论
1) 根据拖拉机悬挂系统的工作特点设计耕深误差大时快速响应、误差小时控制精度高的模糊-PID控制策略,在Simulink里建立模型并进行仿真后得到不同的耕作阻力时力调节、位调节占比与土壤阻力的关系,提出阻力式自调节系数法。
2) 分析耕作阻力与土壤比阻之间的关系,采用随机信号设计耕作环境模拟模块;将阻力式自调节系数法与综合系数取值0.5的控制方式进行仿真对比,二者均在1s内达到稳定耕深,所设计方案在土壤阻力波动范围大时耕深可以满足作物的生长要求,耕深均匀性较好。
3) 阻力式自调节系数法将综合系数的取值与实时耕作环境建立联系,提高拖拉机耕作时的环境适应能力,对综合系数的取值方法提供一种新思路,为实现真正意义上的力位综合控制提供参考。
参 考 文 献
[1]Shafaei S. M, Loghavi M, Kamgar S. A practical effort to equip tractor-implement with fuzzy depth and draft control system [J]. Engineering in Agriculture, Environment and Food, 2019, 12(2): 191-203.
[2]Timene A, Ngasop N, Djalo H. Tractor-implement tillage depth control using adaptive neuro-fuzzy inference system (ANFIS)[J]. Proceedings of Engineering and Technology Innovation, 2021(19): 53-61.
[3]Zhang W, Liu M, Xu L, et al. Simulation of hydraulic suspension system of electric tractor based on Matlab-AMESim [C]. Journal of Physics: Conference Series. IOP Publishing, 2021, 1903(1): 012003.
[4]王素玉, 刘站, 李瑞川, 等. 基于土壤比阻的大功率拖拉机变权重力位综合控制研究[J]. 农业机械学报, 2018, 49(2): 351-357.
Wang Suyu, Liu Zhan, Li Ruichuan, et al. Variable weight force position mixed control of high-power tractor based on soil specific resistance [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 351-357.
[5]鲁植雄, 郭兵, 高强. 拖拉机耕深模糊自动控制方法与试验研究[J]. 农业工程学报, 2013, 29(23): 23-29.
Lu Zhixiong, Guo Bing, Gao Qiang. Study on auto control method and experiment for tractor depth based on fuzzy control [J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(23): 23-29.
[6]江玲玲, 张俊俊. 基于AMESim与Matlab/Simulink联合仿真技术的接口与应用研究[J]. 机床与液压, 2008(1): 148-149.
Jiang Lingling, Zhang Junjun. Interface and application research united simulation technique based on AMESim and Matlab/Simulink [J]. Machine Tool & Hydraulics, 2008, 36(1): 148-149.
[7]Soylu S, arman K. Fuzzy logic based automatic slip control system for agricultural tractors [J]. Journal of Terramechanics, 2021, 95: 25-32.
[8]江翠翠, 王佐勋. 模糊-PID控制在气密性检测压力控制系统中的应用[J]. 齐鲁工业大学学报, 2021, 35(3): 52-58.
Jiang Cuicui, Wang Zuoxun. Application of fuzzy-PID control in air tightness detection pressure control system [J]. Journal of Qilu University of Technology, 2021, 35(3): 52-58.
[9]贾玉文, 段晓, 张厚明, 等. 研究堆Mamdani型模糊控制器设计优化方法[J]. 原子能科学技术, 2021, 55(6): 1091-1097.
Jia Yuwen, Duan Xiao, Zhang Houming, et al. Design optimization method of Mamdani type fuzzy controller applied to research reactor [J]. Atomic Energy Science and Technology, 2021, 55(6): 1091-1097.
[10]商高高, 谢凌云, 季顺静. 拖拉机悬挂系统耕深自动控制策略的研究[J]. 中国农机化学报, 2016, 37(7): 136-140.
Shang Gaogao, Xie Lingyun, Ji Shunjing. Research on plowing depth automatic control for tractor hitch system [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(7): 136-140.
[11]王述彦, 师宇, 冯忠绪. 基于模糊PID控制器的控制方法研究[J]. 机械科学与技术, 2011, 30(1): 166-172.
Wang Shuyan, Shi Yu, Feng Zhongxu. A method for controlling a loading system based on a fuzzy PID controller [J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(1): 166-172.
[12]谭彧. 拖拉机液压悬挂和加载系统性能研究[D]. 北京: 中国农业大学, 2004.
Tan Yu. The study of characteristics for hydraulichitch & loading system in tractor [D]. Beijing: China Agricultural University, 2004.
[13]刘站. 基于土壤比阻的大功率拖拉机电液悬挂控制系统设计与分析[D]. 青岛: 山东科技大学, 2018.
Liu Zhan. Design and analysis of electro-hydraulic suspension control system for high power tractor based on soil specific resistivity [D]. Qingdao: Shandong University of Science and Technology, 2018.
[14]翟力欣. 犁体结构与工作参数对流变型土壤耕作阻力的影响研究[D]. 南京: 南京农业大学, 2011.
Zhai Lixin. Study on the effects of ploughs working and structure parameters on its resistance under rheological soil conditions [D]. Nanjing: Nanjing Agricultural University, 2011.
[15]吕杰. 农用拖拉机后悬挂液压系统的控制研究[D]. 秦皇岛: 燕山大学, 2016.
Lü Jie. Analysis of agricultural tractors rear hitch hydraulic control system [D].Qinhuangdao: Yanshan University, 2016.
DOI: 10.13733/j.jcam.issn.2095-5553.2024.06.008
单海勇, 严旖旎, 张晋, 等. 大豆—玉米带状复合种植耕种机械化研究进展[J]. 中国农机化学报, 2024, 45(6): 42-52
Shan Haiyong, Yan Yini, Zhang Jin, et al. Research progress on mechanization of soybean-corn belt composite planting [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(6): 42-52