4UJ-1700甘薯杀秧机设计与试验
2024-06-17崔中凯周进邸志峰姜伟李娜张华
崔中凯 周进 邸志峰 姜伟 李娜 张华

摘要:针对现有通用薯类杀秧机漏打率、伤薯率高等问题,设计一款特色甘薯杀秧机。该机具由作业拖拉机提供牵引力及作业动力,作业时,甘薯秧蔓在粉碎甩刀、护罩及定刀的共同作用下被打击、揉搓、剪切成碎段,并抛撒至田间。机具包括机架、传动系统、挑秧装置、粉碎装置、悬挂系统等部件,前端两侧设计挑秧机构,由挑秧齿、挑秧板、仿形板及压缩弹簧组成,可将薯垄两侧及垄底薯秧挑起粉碎;选用直刀型粉碎刀并将粉碎刀分为垄顶刀、垄侧刀及垄底刀三种类型,根据垄形尺寸对粉碎刀进行合理布置,实现仿垄形作业;采用分侧传送,同步驱动方式,保证作业过程粉碎刀辊动力充足平稳;配有限深调节装置,可以调整作业高度,防止损伤薯块,并完成样机试制和田间试验。试验结果表明:在拖拉机前进速度为3.6 km/h时,甘薯杀秧机切碎长度合格率为92%、留秧高度为13.5 mm、漏打率为3.3%、伤薯率为0.66%,满足使用要求。
关键词:甘薯;杀秧机;挑秧装置;仿垄形刀片
中图分类号:S225.7+1
文献标识码:A
文章编号:2095-5553 (2024) 06-0008-05
收稿日期:2022年9月1日
修回日期:2023年2月10日
*基金项目:山东省薯类产业技术体系(SDAIT—16—13)
第一作者:崔中凯,男,1987年生,山东邹平人,硕士,工程师;研究方向为现代农业装备。E-mail: kevin6119@@163.com
通讯作者:张华,男,1976年生,山东临沂人,研究员;研究方向为现代农业装备。E-mail: zhanghua126@sina.com
Design and experiment of 4UJ-1700 sweet potato stem chopping machine
Cui Zhongkai, Zhou Jin, Di Zhifeng, Jiang Wei, Li Na, Zhang Hua
(Shandong Academy of Agricultural Machinery Sciences, Jinan, 250100, China)
Abstract: Aiming at the problems of high rate of leakage and damage of potato, a special sweet potato killing machine was designed. The machine was provided with traction force and working power by working tractor. During operation, the sweet potato vine was hit, knead and cut into fragments under the combined action of crushing and swinging knife, shield and fixed knife, and then thrown into the field. The machine included frame, transmission system, seedling picking device, crushing device, suspension system and other components. The machine was designed on both sides of the front end of the picking mechanism, which was composed of picking teeth, picking plate, copying plate and compression spring, which could lift and crush potato seedlings on both sides and bottom of potato ridge. The straight cutter was selected and divided into three types such as ridge top cutter, ridge side cutter and ridge bottom cutter, and reasonable arrangement was made according to the ridge shape size to realize the imitation ridge operation. The use of side transmission and synchronous drive mode was to ensure that the crushing tool roller power was sufficient and stable. With the limited depth adjustment device, the working height could be adjusted to prevent damage to the potato block. The prototype trial production and field test were completed. The test results showed that when the forward speed of the tractor was 3.6 km/h, the qualified rate of the cutting length of the sweet potato killing machine was 92%, the planting height was 13.5 mm, the missing rate was 3.3%, and the damage rate was 0.66%, which met the requirements of use.
Keywords: sweet potato; stem chopping machine; stem pick-up device; ridge-like blade arrangement
0 引言
甘薯属旋花科甘薯属,一年生或多年生蔓生草本,是一种高产、稳产、抗旱、耐瘠、多用途作物,其营养丰富,富含多种维生素、矿物质、膳食纤维、可溶性糖等,可以满足食物多样性的要求。中国是世界上最大的甘薯生产国,常年种植面积约2 330 khm2,产量52 500 kt左右,均居世界首位[1-3]。山东省是甘薯种植大省,常年种植面积130 khm2左右,主要分布在临沂、济宁、泰安、烟台等干旱的丘陵山区和平原旱地[4-6]。
甘薯是劳动密集型地下块根作物,其田间生产环节主要包括排种、剪苗、耕地施肥、起垄覆膜、田间管理、收获等。甘薯收获前,需要清理垄上秧蔓,便于后续挖掘收获。甘薯秧蔓生长茂盛,相互交错,难以分开,且具有较高韧性,增加了收获前秧蔓处理的难度。传统生产方式需要人工弯腰将枝蔓割断并拖拽出收获地块,清理时间长,劳动强度大。研制秧蔓切碎率高、垄沟秧蔓清除效果好的甘薯秧蔓处理机械已成为甘薯机械化收获中重要的一环[7, 8]。
国外甘薯秧蔓处理机械研究起步早,技术成熟,目前已实现机械化处理。欧美国家甘薯秧蔓处理机械主要分3种,一是与大功率拖拉机配套的大型甘薯联合收获装备,集秧蔓处理、挖掘、输送、薯块收集于一体,适用于大规模种植模式,整机尺寸大、售价高,不适合我国小田块种植模式;二是薯蔓收集处理装备,如日本研制了一款履带自走式甘薯秧蔓处理收获机,作业时可将秧蔓铺放到地面后收集粉碎作为饲料,其结构复杂,价格昂贵,对普通农户不适用;三是卷蔓机,利用大型机械将甘薯秧蔓缠绕到支架上,然后拉出田外收集或者切碎处理,一般针对短薯蔓品种,不适合我国种植模式[9]。
与欧美发达国家相比,我国甘薯秧蔓处理机械大多将马铃薯杀秧机或秸秆粉碎还田机上的一些成熟技术进行改装,没有针对甘薯秧蔓生理特性研发设计,机械化处理技术还比较落后,研发的甘薯杀秧机大多存在垄沟垄侧秧蔓除净率低、留秧长、伤薯率高、秧蔓粉碎长度合格率低等问题。针对甘薯不同种植区域和规模,农业农村部南京农业机械化研究所[10-12]研发了几款甘薯秧蔓粉碎还田机,如4JHSM-900型甘薯碎蔓机、步行式甘薯碎蔓还田机等,能够一次性完成挑蔓、切蔓、碎蔓及还田等作业,适合平原、缓坡地规模化种植模式;郑文秀[13]研发了一款单行甘薯秧蔓回收机,可以同步完成秧蔓喂入、切割、粉碎、输送及收集等工序,薯蔓回收率为94%,伤薯率为0.25%;山东希成开发的4JM型杀秧机和山东洪珠研制的1JH型薯类杀秧机结构紧凑、适用性强,适用于小田块薯类秧蔓的处理。
基于此,本文针对山东甘薯生产多为丘陵山区小地块的种植模式现状,研制一种仿垄形甘薯杀秧机,通过关键部件参数化设计和布置,确定合理的机具结构尺寸,通过田间试验获得最佳工作参数组合范围,完成样机设计试制及田间试验,为提高山东甘薯秧蔓机械化处理水平提供关键技术和装备支撑。
1 整机结构与工作原理
1.1 整机结构
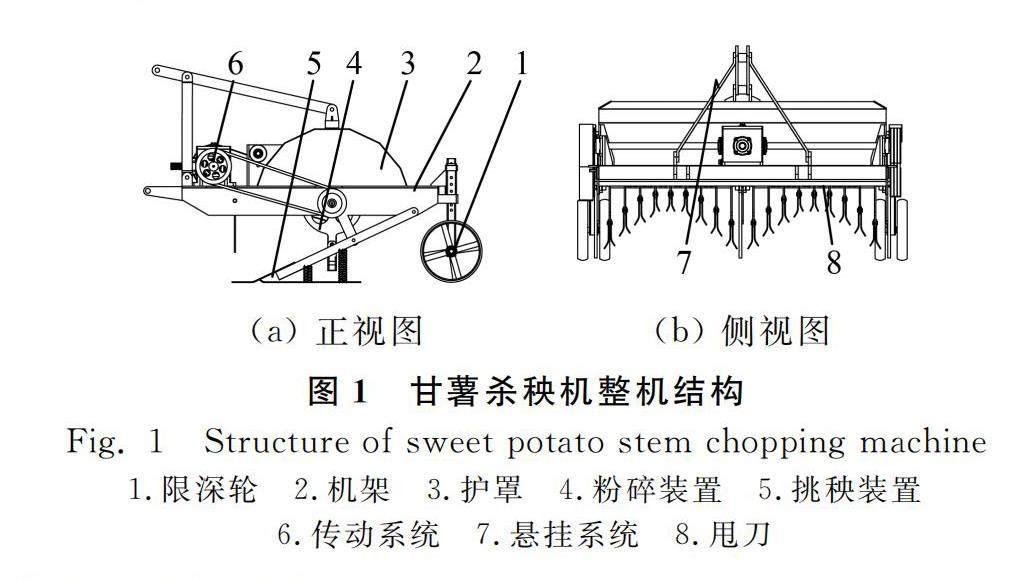
4UJ-1700甘薯杀秧机主要由机架、传动系统、挑秧装置、粉碎装置、悬挂系统、护罩、限深轮等组成,整机结构如图1所示。
1.2 工作原理
甘薯杀秧机通过三点悬挂方式挂接至作业拖拉机,由作业拖拉机提供牵引力及作业动力。作业时,动力经万向节传递至变速箱,然后再由带传动传递至粉碎装置,粉碎装置刀辊高速转动带动甩刀将茎秧及杂草打断,同时将打断后的秧蔓甩入粉碎装置的护罩壳内。在粉碎甩刀、护罩及定刀的共同作用下,甘薯秧蔓被进一步打击、揉搓、剪切成碎段,最后抛撒至田间。
由于甘薯秧蔓易生不定根,为清除垄侧及垄底秧蔓,在机具前端两侧设计有挑秧机构,作业时可将薯垄两侧及沟底薯秧挑起粉碎;针对甘薯起垄种植的生产模式,将粉碎刀分为垄顶刀、垄侧刀及垄底刀,根据垄形尺寸将粉碎刀进行合理布置,实现仿垄形作业,提高杀秧效果;机器配备限深调节装置,便于调整作业高度,防止损伤薯块。
1.3 主要技术参数
4UJ-1700甘薯杀秧机结构设计应符合甘薯种植垄高、垄宽等农艺技术要求。为提高机具通用性,甩刀间距可通过隔套进行灵活调整,以适应不同垄距,整机技术参数如表1所示。
2 关键部件设计
2.1 挑秧机构设计
4UJ-1700甘薯杀秧机在机具前端两侧设计挑秧装置,作业时挑秧机构可拉断薯秧扎根于地表面的毛细秧根,将薯垄两侧及沟底薯秧挑起并向后上方输送至粉碎装置。挑秧装置由挑秧齿、挑秧板、仿形板及压缩弹簧组成,其结构如图2所示。
当挑秧机构与地面的倾角β过大时,秧蔓无法顺利沿挑秧架向侧后方滑动,从而在挑秧弹齿处堆积,影响后续作业,倾角β的值可借鉴甘薯秧蔓的休止角β0,计算如式(1)所示。
β0=arctanμ(1)
式中: μ——秧蔓在挑秧架表面的摩擦系数,取为0.55。
由式(1)可得,甘薯秧蔓的休止角β0为28.8°。为确保甘薯秧蔓滑动顺畅,倾角β≤β0,综合考虑机具结构尺寸及种植模式,挑秧机构与地面的倾角β定为25°。垄底刀及垄侧刀离地间隙为0.034~0.064 m,为使薯秧能够顺利被切割粉碎,需要将薯秧挑起至足够高度。挑秧板长度为l,则
l·tanβ>0.064(2)
由式(2)可得,l>0.14 m,结合整机技术尺寸,确定挑秧铲长度0.255 m。
2.2 粉碎装置结构及转速设计
粉碎装置是甘薯杀秧机的核心工作部件,如图3所示,其结构主要由两侧传动带轮、粉碎刀辊、粉碎刀座、粉碎刀等组成。为减轻结构质量,粉碎刀辊由外径为65 mm的无缝钢管及两侧轴头焊接而成。
粉碎刀是粉碎装置主要工作元件,其形状和参数直接影响整机的工作质量及功率消耗。常用粉碎刀形状主要有直刀型、Y型或L型及锤爪型等三种甩刀。直刀型刀片采用高锰钢制造,粉碎效果较好,结构简单易加工,功率消耗较小,但留茬较高;Y型或者L型刀片采用高锰钢制造,具有较好的捡拾性,对脆秸秆粉碎效果好,但结构较复杂,碰到坚硬物体容易损坏;锤爪型刀片采用高强度耐磨铸钢制成,强度高、耐磨损,适用于高粱、棉花等较硬作物秸秆,但功率消耗较大。考虑甘薯秧蔓易切割粉碎且起垄种植,杀秧机选用直刀型甩刀,加工方便且满足作业需求[14]。
山东甘薯一般采用起垄种植,为粉碎垄底及垄侧秧蔓,粉碎甩刀分为垄顶刀、垄侧刀和垄底刀,根据甘薯垄截面形状,甩刀采用长短刀片组合排列。为减少机具振动,甩刀采用对称排布。
C=N/L(3)
式中: C——刀片的排列密度,片/mm;
N——甩刀数量,片;
L——作业幅宽,mm。
4UJ-1700甘薯杀秧机作业幅宽1 700 mm,刀片排列密度一般取0.02~0.07片/mm,根据计算结果及机具结构限制,取刀片数量为32片。
粉碎刀辊转速是粉碎装置的核心参数,为提高灭茬粉碎还田效果,粉碎刀轴向后旋转[15],即与拖拉机前进方向相反。如图4所示,取粉碎刀轴轴心O为坐标原点,x轴正方向为机具前进方向,y轴正方向为垂直向上,对粉碎刀尖任意一点P(x,y)做运动轨迹分析,则
式中:vm——杀秧机前进速度,m/s;
R——甩刀回转半径,m;
ω——甩刀回转角速度,rad/s;
t——时间,s。
对式(4)中时间t求导,得点P(x, y)的速度
式中: vx——P点水平分速度,m/s;
vy——P点垂直分速度,m/s。
由式(5)可得,粉碎刀复合运动轨迹为余摆线,为将秧蔓充分切割切碎,粉碎甩刀水平方向的分速度绝对值要高于切割甘薯秧蔓所需最小线速度vc,即
|vxmax|=|vm-Rωsinωt|≥vc(6)
式中: vc——甘薯秧蔓切割所需最小线速度。
4UJ-1700甘薯杀秧机正常作业时,机具的前进速度vm=1 m/s,由甘薯收获期秧蔓机械特性可得,切割秧蔓所需的最小线速度vc=25 m/s,粉碎甩刀回转半径R=157 mm,将以上数据代入式(6)可得,4UJ-1700甘薯杀秧机粉碎刀辊转速应大于1 582 r/min。
2.3 传动装置结构设计
为提高甘薯杀秧机杀秧效果,作业过程粉碎刀辊应保证动力充足平稳,4UJ-1700甘薯杀秧机传动系统采用分侧传送,同步驱动的传动方式。为缓和杀秧过程粉碎甩刀与土垡或石块碰撞产生的不均匀载荷冲击,杀秧机两侧传动采用带传动,其传动平稳,能缓冲吸振,过载打滑可防止其他部件损坏。4UJ-1700甘薯杀秧机传动路线如图5所示。
甘薯杀秧机粉碎刀辊转速
式中: n1——拖拉机后输出转速,本文为540 r/min;
Z1——输入轴齿轮齿数,本文为37齿;
Z2——输出轴齿轮齿数,本文为19齿;
d1——大带轮直径,本文为245 mm;
d2——粉碎刀辊轴带轮直径,本文为165 mm。
由式(7)可得,甘薯杀秧机粉碎刀辊转速为1 561 r/min,符合设计要求。根据小带轮直径及粉碎刀辊转速,两侧传动选用B型带,传动带根数
式中: Pc——杀秧作业功率消耗,kW;
P0——单根带所能传递的功率,kW;
ΔP0——传动比i≠1时传动功率的增量,kW;
kα——包角系数;
kl——长度系数。
由式(8)可得,杀秧机两侧传动采用3根B带传动,可满足设计要求。
3 田间试验
3.1 试验条件
2021年10—11月,在济南市章丘区枣园镇山东省农业机械科学研究院甘薯试验基地进行了4UJ-1700甘薯杀秧机田间杀秧试验,试验基地土壤类型为壤土和砂壤土,耕作层厚20~30 cm,透气排水好,适宜甘薯生长。甘薯种植垄距为850 mm,垄宽为350 mm,垄高为200 mm,垄长大于100 m;甘薯品种为适合山东及黄淮薯区丘陵、平原旱薄地种植的济薯26,株距约250~300 mm,结薯深度为200~280 mm,薯蔓平均长度为2 150~2 600 mm,产量45 000 kg/hm2以上。
3.2 试验指标
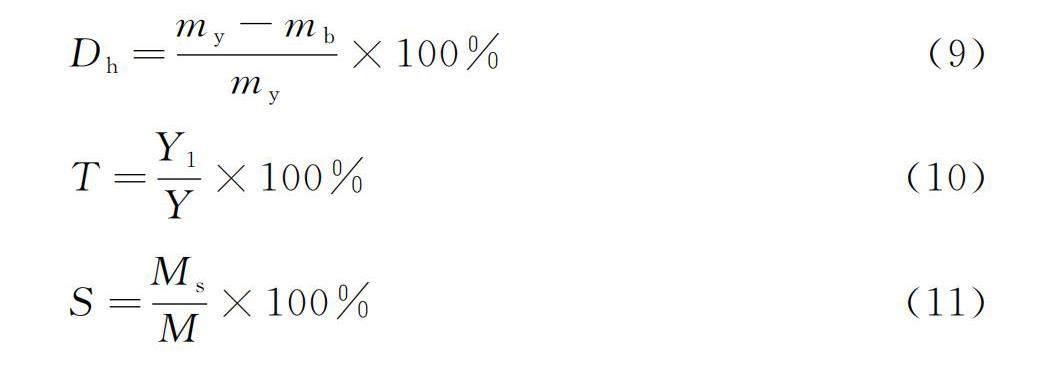
目前尚无甘薯杀秧机相关的国家标准或行业标准,因此4UJ-1700甘薯杀秧机田间试验参照DB/T 3355—2018《甘薯机械化生产技术规范》、NY/T 2706—2015《马铃薯打秧机 质量评价技术规范》、NY/T 1130—2006《马铃薯收获机械》等规定和有关农业机械试验方法进行,要求秧蔓切碎长度合格率≥80%,留茬高度≤150 mm,漏打率≤8%,伤薯率≤1%。机具试验时拖拉机前进速度为3.6 km/h,作业完成后,连续测量10株甘薯残留秧蔓高度,取平均值即为留秧高度,并分别计算秧蔓切碎长度合格率Dh、漏打率T、伤薯率S。
式中: my——测区内打碎秧蔓总质量,kg;
mb——测区内打碎长度大于200 mm的秧蔓质量,kg;
Y1——测区内未打到秧蔓数量,株;
Y——测区内秧蔓总数量,株;
Ms——测区内伤薯质量,kg;
M——测区内薯块总质量,kg。
3.3 试验结果
在上述试验条件下,4UJ-1700甘薯杀秧机试验结果如表2所示。
结果表明,4UJ-1700甘薯杀秧机各部件运转良好,工作性能优良。拖拉机前进速度为3.6 km/h时,甘薯杀秧机切碎长度合格率为92%、留秧高度为13.5 mm、漏打率为3.3%、伤薯率为0.66%,均符合相关标准要求。
4 结论
1) 本文研制一款特色甘薯杀秧机,由作业拖拉机提供牵引力及作业动力,可一次性完成挑秧、切碎、抛洒还田等作业环节。机具包括机架、传动系统、挑秧装置、粉碎装置、悬挂系统等部件,前端两侧设计挑秧机构,由挑秧齿、挑秧板、仿形板及压缩弹簧组成,可将薯垄两侧及垄底薯秧挑起粉碎;刀片排列采用仿垄形设计,可有粉碎垄底及垄侧秧蔓;采用分侧传送,同步驱动方式,保证作业过程粉碎刀辊动力充足平稳;配有限深调节装置,可调整作业高度,防止损伤薯块。机具配套动力35~50 kW,作业幅宽1 700 mm,适应垄距850 mm,纯工作时间生产率0.67~1.33 hm2/h。
2) 完成样机试制和田间试验。结果表明,甘薯杀秧机前进速度为3.6 km/h时,甘薯杀秧机切碎长度合格率为92%、留秧高度为13.5 mm、漏打率为3.3%、伤薯率为0.66%,满足设计与使用要求。
参 考 文 献
[1]赵海, 刘新鑫, 潘志国, 等. 甘薯种植农艺及机械化种植技术[J]. 中国农机化学报, 2021, 42(6): 21-26.
Zhao Hai, Liu Xinxin, Pan Zhiguo, et al. Agronomic characteristics and mechanized planting technology of sweet potato [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 21-26.
[2]申海洋, 纪龙龙, 胡良龙, 等. 甘薯收获期薯块机械物理特性参数研究[J]. 中国农机化学报, 2020, 41(12): 55-61.
Shen Haiyang, Ji Longlong, Hu Lianglong, et al. Study on the mechanical and physical parameters of sweet potato tuber during harvest [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(12): 55-61.
[3]马代夫, 李强, 曹清河, 等. 中国甘薯产业及产业技术的发展与展望[J]. 江苏农业学报, 2012, 28(5): 969-973.
Ma Daifu, Li Qiang, Cao Qinghe, et al. Development and prospect of sweetpotato industry and its technologies in China [J]. Jiangsu Journal of Agricultural Sciences, 2012, 28(5): 969-973.
[4]崔中凯, 张华, 周进, 等. 4U-750牵引式甘薯收获机设计与试验[J]. 中国农机化学报, 2020, 41(5): 1-5.
Cui Zhongkai, Zhang Hua, Zhou Jin, et al. Design and test of 4U-750 trailing type sweet potato harvester [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(5): 1-5.
[5]蒋玉峰, 马代夫. 国家甘薯产业技术体系建设推动甘薯产业和学科发展[J]. 江苏师范大学学报(自然科学版), 2016, 34(3): 23-27.
Jiang Yufeng, Ma Daifu. The sweetpotato of China agricultural research system promotes the industrialization and disciplinary development of sweetpotato [J]. Journal of Jiangsu Normal University: Natural Science Edition, 2016, 34(3): 23-27.
[6]胡良龙, 胡志超, 谢一芝, 等. 我国甘薯生产机械化技术路线研究[J]. 中国农机化, 2011(6): 20-25.
Hu Lianglong, Hu Zhichao, Xie Yizhi, et al. Study on the route of mechanization of sweet potato production technology in China [J]. Chinese Agricultural Mechanization, 2011(6): 20-25.
[7]李涛, 周进, 徐文艺, 等. 4UGS2型双行甘薯收获机的研制[J]. 农业工程学报, 2018, 34(11): 26-33.
Li Tao, Zhou Jin, Xu Wenyi, et al. Development of 4UGS2 type double-row sweet potato harvester [J].Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(11): 26-33.
[8]王冰, 胡志超, 胡良龙, 等. 甘薯联合收获机的研究现状及发展[J]. 江苏农业科学, 2018, 46(4): 11-16.
[9]郑文秀, 吕钊钦, 张万枝, 等. 单行甘薯秧蔓回收机设计与试验[J]. 农业工程学报, 2019, 35(6): 1-9.
Zheng Wenxiu, Lü Zhaoqin, Zhang Wanzhi, et al. Design and test of single row sweet potato vine recycling machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(6): 1-9.
[10]胡良龙, 田立佳, 计福来, 等. 甘薯生产机械化作业模式研究[J]. 中国农机化学报, 2014, 35(5): 165-168.
Hu Lianglong, Tian Lijia, Ji Fulai, et al. Research on the working mode of sweet potato production mechanization [J]. Journal of Chinese Agricultural Mechanization, 2014, 35(5): 165-168.
[11]胡良龙, 胡志超, 王冰, 等. 国内甘薯生产机械化研究进展与趋势[J]. 中国农机化, 2012(2): 14-16.
Hu Lianglong, Hu Zhichao, Wang Bing, et al. Research development and trend of sweet potato production mechanization in China [J]. Chinese Agricultural Mechanization, 2012(2): 14-16.
[12]胡良龙, 田立佳, 计福来, 等. 国内甘薯生产收获机械化制因思索与探讨[J]. 中国农机化, 2011(3): 16-18.
Hu Lianglong, Tian Lijia, Ji Fulai, et al. Analysis and discussion on the restriction causations for harvesting mechanization of sweet potato in China [J]. Chinese Agricultural Mechanization, 2011(3): 16-18.
[13]郑文秀. 甘薯秧蔓回收机设计及切割机理研究[D]. 泰安: 山东农业大学, 2019.
Zheng Wenxiu. Design of sweet potato vine recycling machine and study on cutting mechanism [D]. Taian: Shandong Agricultural University, 2019.
[14]吴腾, 胡良龙, 王公仆, 等. 步进式甘薯碎蔓还田机的设计与试验[J]. 农业工程学报, 2017, 33(16): 8-17.
Wu Teng, Hu Lianglong, Wang Gongpu, et al. Design and test of walking sweet potato vines crushing and returning machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(16): 8-17.
[15]穆桂脂, 张现广, 吕钊钦, 等. 仿形甘薯杀秧机刀辊的设计与仿真分析[J]. 中国农机化学报, 2018, 39(5): 22-26.
Mu Guizhi, Zhang Xianguang, Lü Zhaoqin, et al. Design and simulation analysis of the knife roller of the profiling sweet potato stem killing machine [J]. Journal of Chinese Agricultural Mechanization, 2018, 39(5): 22-26.