新型汽车电子电气架构的数字化仿真测试方法研究
2024-06-08刘铁山鲍振标陈旭
刘铁山 鲍振标 陈旭


【摘 要】文章研究汽车电子电气架构的数字化仿真测试平台搭建流程与方法,旨在测试汽车电子电气架构设计的可靠性和仿真流程。通过分析汽车电子电气架构的特点和需求,提出一种软件在环仿真测试方法。设计并实现仿真测试平台的搭建,涵盖从仿真工具链的筛选、测试框架的构筑到仿真工作平台的创建等环节。通过对实际汽车电子电气系统仿真测试案例进行验证和评估,验证所提出的方法的有效性和实用性,实现工具链的整合利用,明确新型汽车电子电气架构的仿真测试平台搭建流程。最后,对汽车电子电气架构仿真测试方法的应用前景和未来研究方向进行讨论。
【关键词】电子电气架构;仿真测试;软件在环仿真;测试平台搭建
中图分类号:U463.6 文献标识码:A 文章编号:1003-8639( 2024 )05-0081-03
Research on Digital Simulation Test Method of New Automotive Electronic and Electrical Architecture
LIU Tieshan,BAO Zhenbiao,CHEN Xu
(China Intelligent and Connected Vehicles(Beijing)Research Institute Co.,Ltd,BeiJing 102627)
【Abstract】This paper studies the process and method of building a simulation test platform for automotive electronic and electrical architecture,aiming to test the reliability and simulation process of automotive electronic and electrical architecture design. Firstly,a software-in-the-loop simulation test method is proposed by analyzing the characteristics and requirements of electronic and electrical architecture. Secondly,the construction of simulation test platform is designed and realized,which covers the screening of simulation tool chain,the construction of test framework,and the creation of simulation work platform.Then,the effectiveness and practicability of the proposed method are verified and evaluated by the actual E&E system simulation test cases,the integrated utilization of tool chain is realized,and the construction steps of the new automotive E&E architecture simulation test platform are clarified. Finally,the application prospect and future research direction of the simulation test method are discussed.
【Key words】electronic and electrical architecture;simulation test;software in the loop simulation;test platform construction
1 引言
随着近年来车辆与计算机、通信等专业的深度融合,智能网联汽车产业已经成为当下中国汽车产业转型与发展的重点产业。与此同时汽车电子电气系统越来越复杂,OEM(Original Equipment Manufacture,原始设备制造商)车型迭代研发过程中的整车控制器数量不断提升,车型及相关电子配件的研发速度不斷上升。为了应对汽车电子系统的复杂性,同时兼顾不同车型之间的通用化和平台化,一套行之有效的电子电气架构[1]设计是必不可少的。
例如,宝马公司将汽车电子电气架构按功能需求分类,将独立传感器规划到通用控制单元中,再通过OEM进行系统化设计,实现区域整体功能的控制计算功能并集成到ECU中[2]。华为在世界智能网联汽车大会上提出了“平台+生态”的新一代通信计算架构平台,此外,平台将提供强大的算力和操作系统,包括三大计算平台(智能驾驶计算平台、智能座舱计算平台和智能车控计算平台),以及三大操作系统(智能驾驶操作系统AOS、智能座舱操作系统HOS和智能车控操作系统VOS)。以上案例都说明,未来汽车功能的扩展与升级离不开一套高效可靠的电子电气架构。
同时,分布式电子电气架构已经逐步过渡到了集中式电子电气架构,集中式面向服务的架构设计主要由网关服务计算平台、信息娱乐计算平台和辅助驾驶计算平台共同组成。集中式电子电气架构采用Classic AUTOSAR以及Adaptive AUTOSAR的中间件来实现面向服务的车载跨系统通信。Classic AUTOSAR平台支持高安全性和高实时性的应用场景,而Adaptive AUTOSAR则更适用于网络中存在强延迟或干扰的场景。两者互为补充,将汽车电子电气架构平台打造成具备全新用户需求解决方案,实现车辆软件与用户交互层面差异化的通用计算平台。
另外,为了应对当前市场用户对于智能网联汽车的高级辅助驾驶、安全等方面的需求,对整车网络架构也提出了更加高速、稳定等设计上的要求,因而各种架构理论应运而生,如基于域的架构,将汽车电子电气系统划分为不同的功能域[3],每个域由特定的一个ECU或一组ECU负责。这种架构可以提供更好的模块化和可扩展性,预留了接口并且可以防止后期的变更产生故障,允许平行开发和集成多种功能。使用CAN总线、FlexRay总线和Ethernet总线等提供的标准化的通信方式,使不同ECU之间可以进行数据交换和协作。
由于汽车行业的快速发展,汽车电子器件越来越复杂,集中式电子电气架构的应用也愈加广泛。未来汽车电子电气架构的发展面临诸多的挑战,如:搭建一套灵活的智能网联汽车电子电气架构。在未来,智能网联汽车的迭代周期可能大幅缩短,不同领域新技术的应用愈增,市场要求车企更新自身的电子电气架构以适应广大消费者的现实要求[4]。
1)跨域通信网络带宽、内部结构简化的需求:当前跨域通信或单域内部通信的数据带宽所需的流量实际上不足以满足未来的跨域通信所需的通信带宽,同时车载CAN总线技术逐步被车载以太网技术所取代,车内线束的长度和质量都大大降低,减少了内部冗余、资源浪费以及线束过多带来的安全性影响。
2)汽车网络安全的要求:智能网联汽车的出现虽然使消费者享受到了科技创新带来的生活便利,但是也提升了个人用户信息安全方面的风险,汽车企业以及用户将源源不断地面临网络威胁,电子电气架构在网络安全方面的考虑也是必不可少的。
如果在架构设计初期对以上问题进行测试分析,将会大大节省架构开发成本,提升架构开发效率,因此,建设一个应用于智能网联汽车的架构测试平台是非常有必要的。通过对电子电气架构的流程进行分析,架构测试平台至少应满足域控制器功能测试验证、通信测试验证等。本文通过搭建自动驾驶域虚拟控制器、虚拟总线、高精度被控对象模型并对其进行集成,形成数字样车,搭建虚拟场景及道路车辆等进行电子电气架构验证。
2 CP AUTOSAR汽车开放架构分析
CP AUTOSAR为ECU搭建了一个可扩展并且标准化的软件架构,目的是基于对不同车辆平台的强移植性、扩展性及安全性的考虑,提供了支持软件模块的基本规范、接口定义以及基于标准化转换格式的通用开发方法,进而减轻架构开发以及测试人员的研发难度。CP AUTOSAR架构分为3层:基础软件层(BSW)提供部分底层代码并提供运行上层软件功能所需的服务;实时运行环境(RTE)将应用层与中间件层分离,并在ECU中进行两者信息交换;应用软件层(AppL)是与实时运行环境交互的应用软件组件,执行应用层算法。CP AUTOSAR整体架构如图1所示。
各个软件组件通过RTE实现应用程序的完整接口对BSW层的通信访问,BSW层主要分为4部分。
1)服务层:将各种软件组件的功能以服务的形式进行封装,服务被进一步划分为代表系统、内存和通信服务基础设施的功能组。服务层提供的接口与硬件层几乎无关。
2)电子控制单元抽象层:主要用于供给上层使用的微控制器抽象层封装后的标准化接口。
3)微控制器抽象层:整合各种外设,向上层提供接口,与ECU设计无关。
4)复杂驱动层:主要定义一些软件实体用来实现传感器处理和执行器驱动,比如电磁阀控制、电机控制等。复杂驱动层跨越MCAL、ECU抽象层和服务层,是AUTOSAR标准之外的基础模块,通过复杂外设或特定中断实现执行器驱动或传感器处理。
CP AUTOSAR平台的虚拟功能总线VFB是一个基本概念。这个虚拟总线是一组抽象的RTE。VFB具备专用端口,应用软件的通信接口必须映射到专用端口上才能进行通信。单个ECU内和不同ECU之间的通信可以被VFB处理。
另外,微控制器抽象层MCAL是BSW的最底层。MCAL是需要依赖于MCU而存在的,其主要包含了以下模块:①微控制器驱动,MCU内部外设驱动,如看门狗、定时器等;②通信接口驱动,如车辆通信接口驱动(CAN、以太网等),以及ECU板上通信接口驱动SPI等;③I/O驱动,如PWM驱动、ADC驱动等;④加密模块驱动,如SHE、HSM等片上加密驱动;⑤非易失性存储器驱动,如内部Flash片上存储器驱动、外部Flash片外存储器驱动等。
在AUTOSAR架构之下,由于非常多的工程师只会在开发流程的末期测试设计的模型或者代码,但是通过增加工程师数量等方法去解决目前架构复杂导致的工作量巨大的问题是不现实的,因此利用已有的仿真环境搭建仿真平台,设计仿真方法,加快仿真測试速率(在实体硬件可用前),降低仿真测试难度,这是非常有必要的。
3 架构仿真测试平台搭建
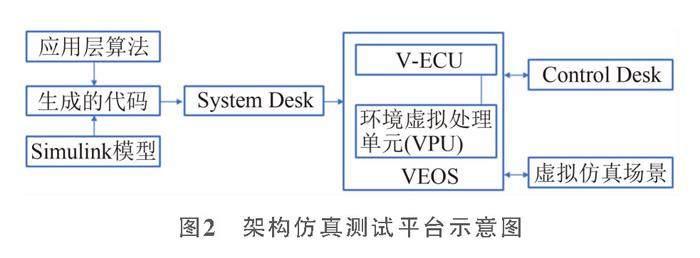
为实现电子电气架构测试的目标,需要提前进行ECU测试[5],进而验证电子电气架构可行性。为实现ECU虚拟化,利用软件在环测试SIL技术,无需实体硬件车载控制器,即可实现架构仿真测试,因此需要一套合理的方法和工具来创建这种虚拟车载控制器并验证其效果。架构仿真测试平台示意图如图2所示。
通过虚拟车载控制器代替实体车载控制器,实现对电子电气架构的测试工作。技术人员需保证基于V-ECU(虚拟车载控制器)架构功能实现的真实性与可靠性,V-ECU的开发数据需要与最终的硬件ECU保持一致,例如软件架构中的XML文件与相关模型代码一致。同时,为架构测试所需的ECU必须遵循AUTOSAR标准来创建。
本文利用dSPACE公司架构工具SystemDesk来进行V-ECU的快速设计与搭建。通过V-ECU相关的描述文件,技术人员可以得到遵循AUTOSAR标准的电子电气架构。同时,这些描述文件与每个功能相关的SWC(软件组件)的生成密不可分,通过C代码实现SWC。AUTOSAR元素中包含着功能,以使用非AUTOSAR的代码。然后通过描述文件将SWC添加到ECU架构中。最后创建实时运行环境(RTE),并与先前创建的SystemDesk基础软件进行集成。
之后利用ControlDesk这一通用的模块化试验及仪表软件进行实时ECU功能测试,ModelDesk进行虚拟场景搭建,利用VEOS仿真环境进行虚拟ECU的仿真工作,包括总线通信以及模型仿真,通过dSPACE的模型接口包MIPS(Model Interface Package for Simulink)利用Simulink生成的C代码,生成可重复使用的SIC文件。在集成模型时,如果生成了SIC文件则无需再编译生成代码。最后通过AURELION进行车辆实时仿真,验证驾驶功能。
4 架构仿真测试功能验证
通过章节3设计的新型电子电气架构仿真测试方法进行智能网联汽车电子电气架构自驾域功能测试,利用AURELION虚拟场景软件与ControlDesk实时功能测试软件进行车辆自适应巡航控制功能验证,以及自驾域总线信号功能验证。新型电子电气架构仿真测试界面如图3所示。
在测试平台上运行ACC(Adaptive Cruise Control,自适应巡航)算法,仿真过程中用Simulink对虚拟场景中前车速度、后车速度、ACC标志和检测速度进行监测,新型电子电气架构仿真测试验证结果如图4所示。结果表明后车能较好地对前车进行自适应巡航,验证了新型电子电气架构仿真测试的可行性。
5 结束语
本文通过搭建智能网联汽车电子电气架构测试平台,对基于域控制器的电子电气架构进行测试,大大降低了架构测试成本、架构测试流程周期以及架构测试验证的难度。同时,有利于推动智能网联汽车行业内分布式架构到域控制器架构的转型,从一定程度上有利于整合新车开发的软硬件资源,达到了新型汽车电子電气架构的仿真测试方法研究的目的。在未来,将对基于域控制器的新型车辆电子电气架构进行更详细的测试功能需求解读,设计测试系统方案,提供测试设计依据以及编写测试用例。
参考文献:
[1] 华一丁,龚进峰,戎辉,等. 基于模型的智能汽车电子电气架构发展综述[J]. 汽车零部件,2019(2):63-66.
[2] 邓戬. 智能网联汽车电子电气架构设计与试验研究[D]. 长春:吉林大学,2020.
[3] 刘佳熙,丁锋. 面向未来汽车电子电气架构的域控制器平台[J]. 中国集成电路,2019,28(9):82-87.
[4] 李白. 技术整合的解决之道德尔福派克电气罗伯特·赛德勒谈汽车电子电气架构[J]. 汽车与配件,2010(16):22-23.
[5] 李震,刘敏. 基于Autosar的整车电子电气架构设计方法[J]. 机电一体化,2012,18(11):73-76.
(编辑 杨凯麟)
收稿日期:2023-10-11
