增程式混合动力系统硬件在环仿真测试研究
2024-06-08王德军王文霞杨业振许成林
王德军 王文霞 杨业振 许成林


【摘 要】文章分析增程式混合动力系统原理结构,基于dSPACE实时仿真系統构建仿真物理模型,主要包括发动机模型、发电机模型、锂电池模型、电机模型、变速器模型、车辆动力学模型等,并连接真实HCU和TCU进行功能联调。经验证可提前发现软件存在Bug,提升软件品质,避免问题产品流向市场。
【关键词】增程式混合动力;硬件在环;dSPACE;HCU;TCU
中图分类号:U469.72 文献标识码:A 文章编号:1003-8639( 2024 )05-0073-03
Research on HIL of Extended Range Hybrid Power System
WANG Dejun,WANG Wenxia,YANG Yezhen,XU Chenglin
(Weichai Power Co.,Ltd.,WeiFang 261041,China)
【Abstract】This paper analyzes the principle structure of extension-range hybrid power system,and builds simulation physical models based on dSPACE real-time simulation system,including engine model,generator model,lithium battery model,motor model,transmission model,vehicle dynamics model,etc.,and connects real HCU and TCU for functional coordination.The verification can detect software bugs in advance,improve software quality,and prevent faulty products from flowing to the market.
【Key words】extended range hybrid;hardware-in-the-loop(HIL);dSPACE;HCU;TCU
作者简介
王德军(1984—),男,高级工程师,硕士,研究方向为新能源电控系统开发和测试;王文霞(1987—),女,高级工程师,硕士,研究方向为传动系统开发和测试;杨业振(1995—),男,助理工程师,硕士;许成林(1998—),男,助理工程师,研究方向为新能源电控系统开发和测试。
增程式混合动力系统结构简单,主要部件国内均有成熟供应商,发动机工作在高效率区,随着变速器技术逐渐成熟,增程式混合动力系统也能匹配变速器,解决了无变速器动力不足问题,在矿卡、公交等领域得到广泛应用。本文基于dSPACE的SCALEXIO实时仿真系统,提取主要部件数学表达式,在MATLAB/Simulink搭建发动机、发电机、电机、锂电池、变速器等的HIL模型,通过Configuration Desk软件生成SDF文件,在ControlDesk软件搭建硬件在环测试环境,连接HCU、TCU控制器进行联调,并验证HCU、TCU主要功能,能够有效加快研发进度。
1 HIL资料准备
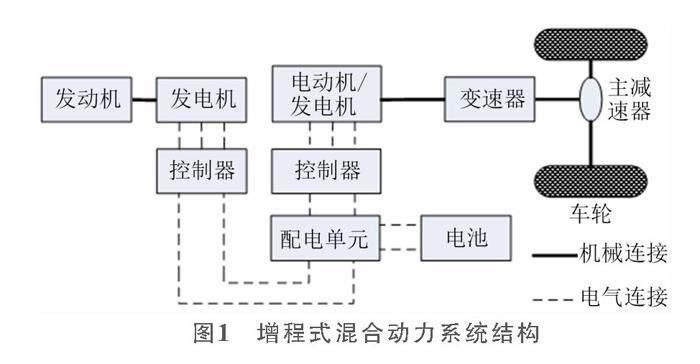
HIL模型主要用来满足控制器软件测试需求,并不是越复杂越好,搭建合适的HIL模型需要熟悉被控对象结构原理,熟悉主要部件相互关系,才能提取出合适的数学表达式。增程式混合动力系统结构如图1所示。发动机和发电机组成了辅助动力系统(Auxiliary Power Unit,APU),发动机只作为APU系统动力来源驱动发电机工作,同驱动电机没有机械连接,发动机的运行在很大程度上摆脱了行驶工况的影响[1]。
为解决换挡动力中断问题,提出了双电机4挡双变速器结构,如图2所示。例如当驱动电机1换挡时驱动电机2不换挡,电机2可继续驱动车辆行走;当电机1换完挡后,电机2再换挡,电机1在电机2换挡时可以继续驱动车辆行走。A2换挡电机带动拨叉A2实现变速器2在1挡和2挡切换,A1换挡电机可实现3挡和4挡切换,同理B2、B1电机可以实现不同挡位切换。
搭建HIL工程时需要准备相关材料(表1)才能搭建HIL模型,如果关键参数缺失,可以利用经验赋值,不会影响控制器功能测试,但在某些工况下同实车数据会存在误差[2]。
2 HIL模型搭建
2.1 HIL测试平台搭建
搭建基于SCALEXIO系统的HIL测试平台,包含有SCALEXIO S i m u l a t o r、负载箱、电脑主机及所需测试的HCU、TCU,如图3所示。
SCALEXIO Simulator通过网线与主机相连,通过ConfigurationDesk软件将在MATLAB/Simulink中的HIL模型编译生成SDF文件,通过ControlDesk软件下载到SCALEXIO Simulator中运行。根据提供的HCU和TCU针脚定义结合DS2680板卡的针脚搭建IO信号列表,并通过ConfigurationDesk进行接口配置来实现IO信号交互。HCU和TCU之间的报文通过CAN线连接,不需要通过RTICANMM模块来仿真,发动机、发电机、电机、变速器、手柄、仪表等的CAN报文通过RTICANMM模块仿真[3]。
HCU和TCU与电脑主机通过CANape或INCA标定设备进行相连,可实时读取控制器中的信息,并对其进行标定检测来验证相关功能,通过ControlDesk搭建仿真测试环境,可以对HIL模型进行实时标定修改,并且仿真驾驶员的不同操作来验证增程混合动力系统的主要功能[4]。
2.2 HIL模型介绍
本文基于MATLAB/Simulink搭建HIL模型,其架构如图4所示,主要由IO模型、CAN模型和HIL模型组成。HIL模型最基本要求是满足HCU、TCU控制器联调需求,搭建太简单不能满足功能测试需求,太复杂对精度要求过高需要花费大量时间,需要合理分析提取出各部件主要数学表达式来搭建合适的HIL模型验证功能[5]。
IO模型主要是HIL机柜和HCU、TCU的硬线接口,主要为HCU的电源信号(供电信号、使能信号)、开关信号(PTO开关、手刹开关)、传感器信号(油门踏板信号、制动踏板信号)、TCU的电源信号(供电信号、使能信号)、传感器信号(输出轴转速、4个换挡位置传感器、变速器温度等)、驱动信号(4个换挡电机H桥)和CAN信号(发动机、发电机、电池、电机、仪表、换挡手柄等),HCU和TCU之间CAN信号通过真实CAN线连接[6]。
HIL模型包含发动机和发电机组成的APU模型、电池模型、双电机模型、变速器模型、车辆动力学模型,其中APU和电池HIL模型架构如图5所示。
APU模型包含发动机简易模型,不包括喷油、燃烧、后处理等仿真,其输入信号有钥匙上电、起动信号、发动机需求模式、需求扭矩、需求转速、发动机实际转速、油门开度。通过输入信号可以仿真发动机在待命、上电、起动中、起动完成、运行、停止中、停止等不同发动机状态,再结合发动机的外特性,可仿真HCU对发动机控制需求,进而计算出发动机净扭矩。另外,可根据转速和发动机温度查MAP得到发动机摩擦扭矩。
发电机模型不需要仿真id、iq轴电流,主要是仿真发电机电压、电流、发电机转速、发电机扭矩。发电机的电压在完成上高压继电器闭合后同电池电压相等;发电机和发动机两者转速一样,可通过对角速度积分获得;发电机扭矩可以根据转速模式或扭矩模式获得;根据能量守恒,通过转速和扭矩计算得到机械功率,机械功率除以转换效率(例如:0.96)得到电功率,电功率除以发电机电压就得到发电机电流。
电池模型主要仿真电池SOC、电池电压、电池电流、电池高压继电器状态,不需要仿真电池均衡、电池热管理、电池活化和浓差极化损耗等。电池SOC可通过安时积分法获得;可通过SOC、电池温度查MAP得到单体理论电压,再通过SOC和温度查MAP得到电池内阻,乘以电流就得到欧姆损耗,单体电压即为理论电压减去欧姆损耗,再乘以单体个数即为电池电压;电池电流可由发电机电流和2个驱动电机电流相加得到,当相加为正时电池放电,当相加为负时给电池充电。
2个电机模型和发电机建模原理一样,主要也是仿真电机电压、电流、电机转速、电机扭矩,其中电机1的转速和变速器1输入轴转速一样,电机2的转速和变速器2输入轴转速一样。
变速器模型为整个物理模型的关键部分,其输入包含换挡执行机构H桥、变速器当前挡位(TCU根据反馈位置计算,通过CAN报文给HIL)等,输出包含变速器输入轴转速计算、输出轴转速计算、换挡实际位置等。
车辆动力学模型为仿真轮胎的滚动阻力、迎风阻力、坡度阻力、加速阻力以及制动阻力,其输入为差速器的转速、坡度、制动开度,输出为车速。
2.3 HIL工程闭环调试
模型搭建完后,根据提供的整车、发动机、变速器参数进行模型参数化,并在MATLAB中进行离线运行调试,调试通过后通过ConfigurationDesk软件把模型和IO接口、CAN接口生成SDF文件,并导入ControlDesk进行HIL模型的标定[7]。ControlDesk闭环测试界面如图6所示。
HIL开环调试是闭环调试基础,通过对IO和CAN报文的测试确保TCU与HIL之间信号交互无误,从而确保控制器和被控对象之间进行正确的信号传递,再进行闭环调试。HIL主要开闭环功能测试条目见表2,其中闭环调试核心是换挡功能(验证挡位决策和换挡时序)。通过调试电机、变速器等参数能够实现闭环,实际挡位响应需求挡位,选换挡位置和实际位置变化趋势一致,如图7所示。
3 结论
基于SCALEXIO的增程式混合动力系统硬件在环仿真及调试是一个系统工程,首先需要相关资料准备,然后在MATLAB环境下搭建HIL模型,其次需要熟悉增程式混合动力系统的工作原理和增程控制策略,最后才能完成整个工程闭环调试,后期基于台架和实车数据持续迭代优化HIL模型,提高模型仿真精度。通过试验结果分析,该系统能够满足软件测试需求,基于该系统的软件测试可以提前发现存在的问题,大大提高研发进度。
参考文献:
[1] 宋嘉健. 增程式辅助动力系统匹配与仿真研究[D]. 北京:北京理工大学,2017.
[2] 房永强. 增程式电动客车动力系统集成与匹配分析[J]. 汽车实用技术,2023,48(20):20-25.
[3] 李彦晶,魏宏进,李万敏,等. 两挡变速器增程式电动汽车动力性研究[J]. 機械工程与自动化,2023(2):22-24,28.
[3] 冯瀚. 电动汽车增程器控制策略研究[D]. 武汉:华中科技大学,2022.
[4] 赵光勇. 增程器发动机性能开发仿真分析[J]. 兵工自动化,2022,4(8):81-85.
[5] 高龙,强同磊. 增程式电动汽车的整车控制系统研究[J]. 汽车制造业,2022(2):24-25.
[6] 吴志伟. 增程式电动客车动力系统参数匹配与运行优化研究[D]. 杭州:浙江大学,2021.
[7] 宋金龙. 增程式电动汽车动力系统参数匹配与仿真分析[J]. 装备机械,2021(2):40-43,67.
(编辑 杨凯麟)
收稿日期:2024-02-19
