高速旋转设备智能感知系统搭建及数据上传方法研究
2024-06-07葛世祥李娜娜杨林杰刘春波曹延军
葛世祥 李娜娜 杨林杰 刘春波 曹延军

DOI:10.20030/j.cnki.1000?3932.202403023
摘 要 针对高速旋转设备的特点搭建了物理智能感知系统,重点对系统所产生的传感器数据如何高效上传进行了深入研究。高速旋转设备物理感知系统具有采集信号多、采集方式多及数据量大等特点,提出3种上传算法:多线程多行算法可工作于普通单片机系统,上传速率达到0.06~0.07 MB/s,可满足系统工作于趋势值自动采集方式下的上传要求;单进程分页算法要求上传硬件系统为工业级单片机或嵌入式系统,上传速度可达0.7~0.8 MB/s,且稳定,可以满足系统工作于手动采集方式下数据实时上传的要求;多进程并行算法的硬件要求为多运算器设备,上传速率取决于运算器数量,10运算器主机上传速率稳定在约3.4 MB/s,可满足多设备系统任何数据采集方式下数据实时上传的要求。文中所做分析可为旋转机械行业数字化发展提供切实可行的方案。
关键词 高速旋转设备 数字化 优化算法 多线程 多进程
中图分类号 TP274 文献标志码 A 文章编号 1000?3932(2024)03?0528?07
作者简介:葛世祥(1990-),工程师,从事高速齿轮传动装置转子动力学研究及新产品研发工作。
通讯作者:曹延军(1975-),高级工程师,从事高速齿轮传动装置的研究开发及成果转化工作,caoyj06@126.com。 引用本文:葛世祥,李娜娜,杨林杰,等.高速旋转设备智能感知系统搭建及数据上传方法研究[J].化工自动化及仪表,2024,51(3):528-534.
随着工业4.0的发展,机械信息物理系统(Cyber Physical System,CPS)应运而生[1]。CPS是一种整合物理机械实体与网络技术的多维度智能技术体系,以大数据与网络为基础,通过智能感知、分析及挖掘等技术促进制造业向数字化、智能化方向发展[2]。CPS体系结构分为五层,分别为智能感知层、网络层、智能分析层、智能认知层与智能决策执行层。五层结构体系为CPS在制造业的部署提供了指导方针[3]。
高速旋转设备的CPS体系可表示为:机械传感器(智能感知)层,获取机械运行数据,包括正常运行数据与故障数据;数据分类及上传(网络)层,完成数据的分类存储及上传数据仓库;智能分析层,其以数据仓库数据为基础进行旋转机械运维及故障预测与诊断分析等,为售后技术服务和机械优化设计奠定理论基础;智能认知层,打通高速旋转设备企业销售、物流、生产、设计与售后等各环节,使数据能够在企业内部无障碍流通,实现企业纵向数据集成;智能决策执行层,完成企业横向数据集成,即企业与代理商、供应商及客户等数据互联,实现企业间协作与信息共享,最终实现智能制造所倡导的“客户定制、按需生产”[4]。
目前国内旋转机械行业数字化进程发展缓慢,主要原因为对数据分类及上传层的相关研究较少,实用性成果几乎没有,成为旋转机械企业CPS体系发展的瓶颈[5~7]。数据分类及上传层位于CPS体系机械传感器层与智能分析层之间,其相关研究需要研究者兼具机械与计算机专业知识,属于交叉学科范畴。解决这一困境的最佳措施就是研究该层相关技术,打通基础物理数据上传至数据仓库的通路,获取海量旋转机械实际运行及故障数据,为后续旋转设备数字化奠定数据基础。
笔者针对工业常用旋转设备高速轻载齿轮箱搭建智能感知系统,研究其运行过程中获取的海量监测数据的分类上傳方法,实现数据实时、准确、稳定上传至数据库,为后期数据仓库的构建及数据智能分析奠定理论基础。
1 多传感器智能感知系统搭建
1.1 物理设备及采集物理量种类
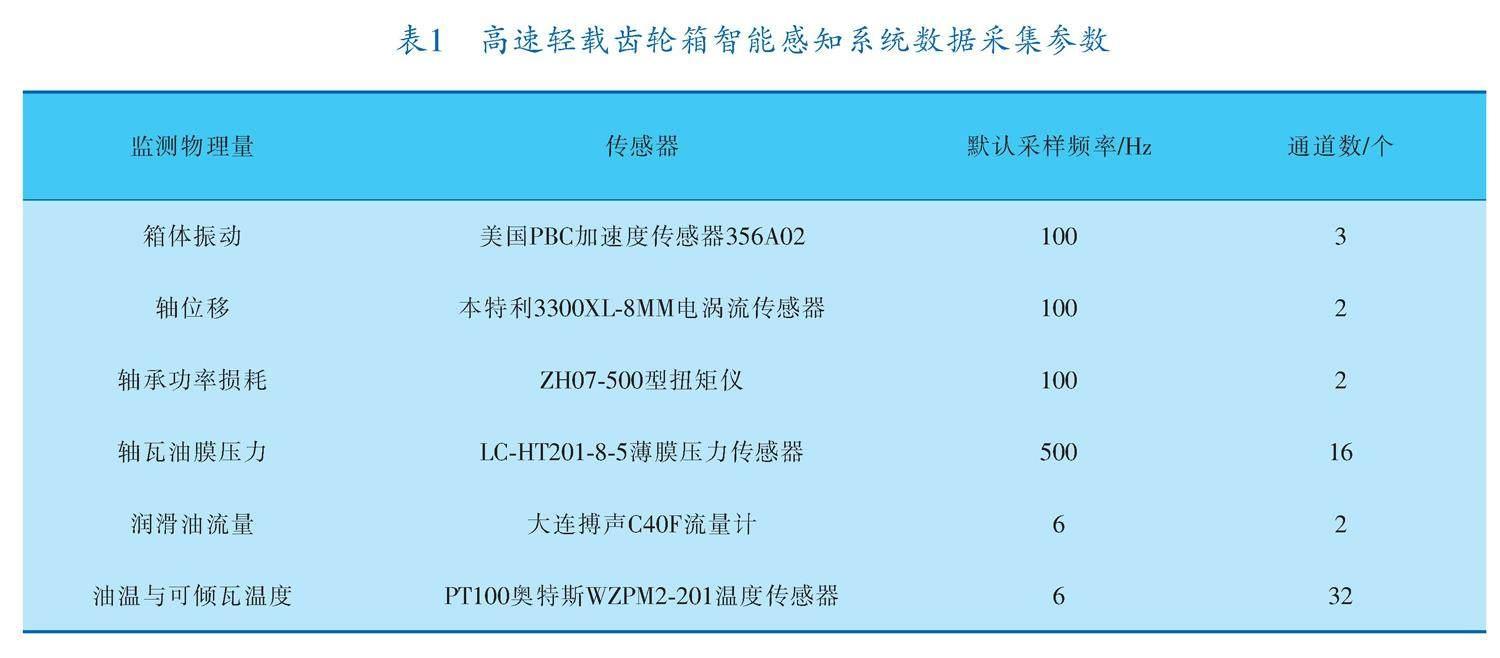
文中的研究对象为可倾瓦轴承高速轻载齿轮箱,为了确保数据采集的全面性,选择6类可表征高速齿轮箱性能的特征物理量:箱体振动、轴位移、轴承功率损耗、轴瓦油膜压力、润滑油流量、油温与可倾瓦温度。为确保采集数据的质量,根据不同信号的特征,选择不同的采样频率和通道数,数据类型选择精度较高的双精度型,具体情况见表1。
1.2 数据采集系统构建
数据采集系统针对高速齿轮箱运行数据的特点,提供3种数据采集方式:趋势值自动采集、手动采集与报警自动采集。为减少数据量,采集数据存储格式为TDMS文件格式。趋势值主要提供设备整个生命周期内各性能相关物理量的变化趋势,设备运行期间持续采集;手动采集是对设备运行过程中特别关注的物理量进行自由采集,需要时手动开始、手动结束;报警自动采集的对象是发生报警前后10 s的所有数据。具体见表2。
1.3 高速齿轮箱设备编码与采集数据的特征
各类数据采集后存储于采集系统上位机中,参照电厂KKS标识系统[8]为设备编码,如图1所示,这样编码可以有效避免不同设备同时进行数据上传而引起的数据混乱,为后续设备运维和数据分析奠定基础。
每台设备运行数据用11张表进行存储,1张总表,10张物理量分表,如图2所示。
目前工业中普遍使用的各类高速旋转设备监测系统构建形式与笔者所建智能感知系统基本一致,运行监测物理量与采集信号也基本相同,因此笔者所搭建的系统具有普适性,以该系统为例研究数据上传方法具有实际应用意义。
2 数据上传方法
笔者选择MySQL作为数据库,数据类型为varchar,可达到容纳所有类型数据的目的。此外,齿轮箱运行所采集数据精度高,小数点后需要保留6位数字以上,以牺牲精度来提高上传速度的方法不可行。笔者采取根据数据特征开发上传方法的研究策略,以达到数据稳定、快速、准确上传的目的[9~11]。
2.1 多线程多行算法
针对趋势值自动采集方式单位时间数据量较小的特点,研究了多线程多行上传算法,特点为对上传硬件设备要求低,普通单片机系统即可满足要求。算法的核心思想为将每张表数据分成多个部分,分配给多个线程同时上传,通过并发执行提高单位时间内上传的数据量[12,13]。针对线程间不区分顺序引起的数据库数据顺序与原始表中不一致的问题,在数据库中增加编号一列,标记原始表中数据顺序,以便在数据库中调整顺序,达到数据有序上传的目的。
参考表1、2,趋势值自动采集方式下,智能感知系统获取数据的速率约为5 MB/h,按默认采样频率,获取数据的速率约为210 MB/h,选择上传测试数据量区间为5~50 MB与50~250 MB,以满足不同采样频率的上传要求。对所选区间内数据量分别进行120组试验,得到了最佳线程数量与上传数据量、时间的关系,如图3a、b所示,按照图中数据进行线程数设置,可同时保证数据上传的完整性与实时性。
经过斜率计算可知,多线程多行算法平均上传速率为0.06~0.07 MB/s。上传趋势值自动采集方式下的数据时,每小时采集的数据量可在约90 s内完成;上传默认采样频率的数据时,每小时采集的数据量可在55 min内完成,实时性较好,即使遇到网络状态不好的情况,也完全满足要求。
2.2 单进程分页算法
当高速齿轮箱设备运行于手动数据采集或报警自动采集方式下时,由于采样频率较高,短时间内采集数据量大,当所采集数据表行数达到百万行量级时,必须采用多个数据表完成存储。因此,继续研发了单进程分页上传算法,即将整张数据表的数据同时扫描上传。单进程分页算法较多线程多行算法复杂,对主机CPU及配套I/O的执行速度要求较高,上传主机需配置为工业级单片机或嵌入式系统。
算法的核心思想是利用上传主机的缓存配置,读取所有表格数据信息后,通过sql语句进行分页写入数据库。此外,需要将表格数据类型转换成列表数据类型,实现批量插入数据。创建游标,对操作数据库后返回的记录进行遍历,以确保数据上传完整且准确,不出现数据遗失。
经过研究与测试,单进程分页算法可使数据上传速率大幅提高,上传测试结果如图4所示。为全面测试单进程分页算法性能,将上传试验分成3个数据量段进行:0.5~5 MB、5~50 MB与100~1 000 MB,横轴以数据量对数表示,纵轴以上传时间的对数表示。由图可知,该算法上传数据量与所需时间呈较标准的线性关系,平均上传速率约0.79 MB/s,每小时上传数据量可达2 844 MB,完全满足高速齿轮箱单机运行时手动数据采集方式下数据实时上传的需求。
2.3 多进程并行算法
为达到报警自动采集方式下数据实时上传的目的,采取多进程并行算法对分页算法做进一步优化,核心思想为利用高速齿轮箱特征物理量采样频率不同引起的数据产生率差距大的特点,同时对相近采样频率下产生的多张数据表格并行上传,多核主机的多个运算器同时工作,进一步提升上传速率,且保证进程之间相互独立,互不影响[14,15]。该算法实现的物理基础是上传主机需为多运算器设备,文中试验时采用4运算器笔记本电脑。
多进程并发算法的实现需要引入multiprocessing包,以便多进程实现过程中调用所需函数。使用不定参数*args形式定义函数,创建进程池,进程池大小为主机运算器数量,关键语句为pool=multiprocessing.Pool(),括号中建议输入上传主机运算器数量。定义多个字典变量,用来存储每张表格的表格名称和数据信息。
以高速齿轮箱不同数据采集方式下5 h数据总量为上传目标进行数据上传试验,并与单进程分页上传算法进行对比,结果见表3。可见,以多运算器为基础的多进程并行上传算法比单进程上传速率提高较明显,且上传速率随数据量的增加而增加。由于多进程并发算法的特点是多运算器并行工作,属于并行计算范畴,数据量的增加会促使子任务流水线时间上的并行趋于合理,进而提高数据的上传速率。将并行算法应用于高速齿轮箱报警自动采集方式下,数据上传速率为2.0 MB/s,完全满足实时性要求,且为继续提高系统采样频率提供了充足的上传速率余量。
3 多设备智能感知系统数据上传方法研究
前文研究了单套多传感器高速齿轮箱监测数据上传方法,若企业配置多台高速旋转设备,且多台设备运行数据均需实时上传时,可运用局域网将所有设备数据采集系统连接起来,数据统一存储于上位机中。设备台套数的增加,会导致单位时间产生数据量的增加,由表3可知,如采用多进程并行上传的方法,上传数据量的增加会促使上传速率增大,为多台套设备数据同时上传奠定了理论基础。单纯依靠时间并行合理化提高上传速率的方法效果有限,要想保证所有设备数据实时上传,需从空间并行角度解决问题,即根据设备数量升级上传主机配置,增加运算器数量。
3.1 时间并行对多进程并行算法上传速率的影响
为探究增加数据量方式对上传速率的影响,同时考虑上传主机配置的因素,上传设备选择用4、6、8以及10运算器主机,运用多进程并行上传算法对多表数据进行上传试验,数据量选择1~10 GB,由于每张EXCEL子表能够存放数据的行数为328 616,折合数据量约50 MB,得到数据量与上传表格数量关系为1 GB25个子表,则1~10 GB数据量对应表格数为25~250个。
不同运算器数量的计算机其上传速率与数据量的关系如图5所示。从图中可以看出4条曲线均呈现先增长后平缓的趋势,即上传速率随着上传数据量的增加而增加,达到某一阈值点后趋于稳定。可见,时间并行合理化因素促使上传速率增加的效果确实存在极限,且极限位置与运算器数量关系不大。4、6、8以及10運算器主机,上传数据量阈值点均位于5~6 GB处。
与数据量的关系
按照稳定上传速率计算,4、6、8以及10运算器主机1 h可实时上传的数据量约为7 200、8 280、10 080、12 240 MB,可满足2~4台高速设备同时在各种数据采集方式下数据上传的需求。若设备转速较低,则各物理量采样频率可设置更小,允许同时采集设备数会相应增加。
3.2 空间并行对多进程并行算法上传速率的影响
数据上传包括两个阶段,本地数据获取与上传数据库写入。数据获取过程相当于读取操作,速度主要取决于上传设备片间总线的数量与性能;上传过程相当于写入操作,速度则取决于CPU运算器的性能与数量,同时还取决于实时网速。文中将这两种影响统一视为空间上并行因素。
运用4运算器主机进行数据上传试验,数据量选择为100~1 000 MB,间隔为100 MB,得到数据量与获取时间、上传时间的关系(图6)。可以看出,数据获取、上传时间均与数据量成线性关系,但斜率不同,数据获取速率约为1.24 MB/s,数据上传速率约为2.5 MB/s。由此可知,片间总线配置是影响总数据上传时间的主要因素,上传设备硬件配置越合理,即片间总线性能与CPU性能越匹配,获得的数据上传速率就越高。
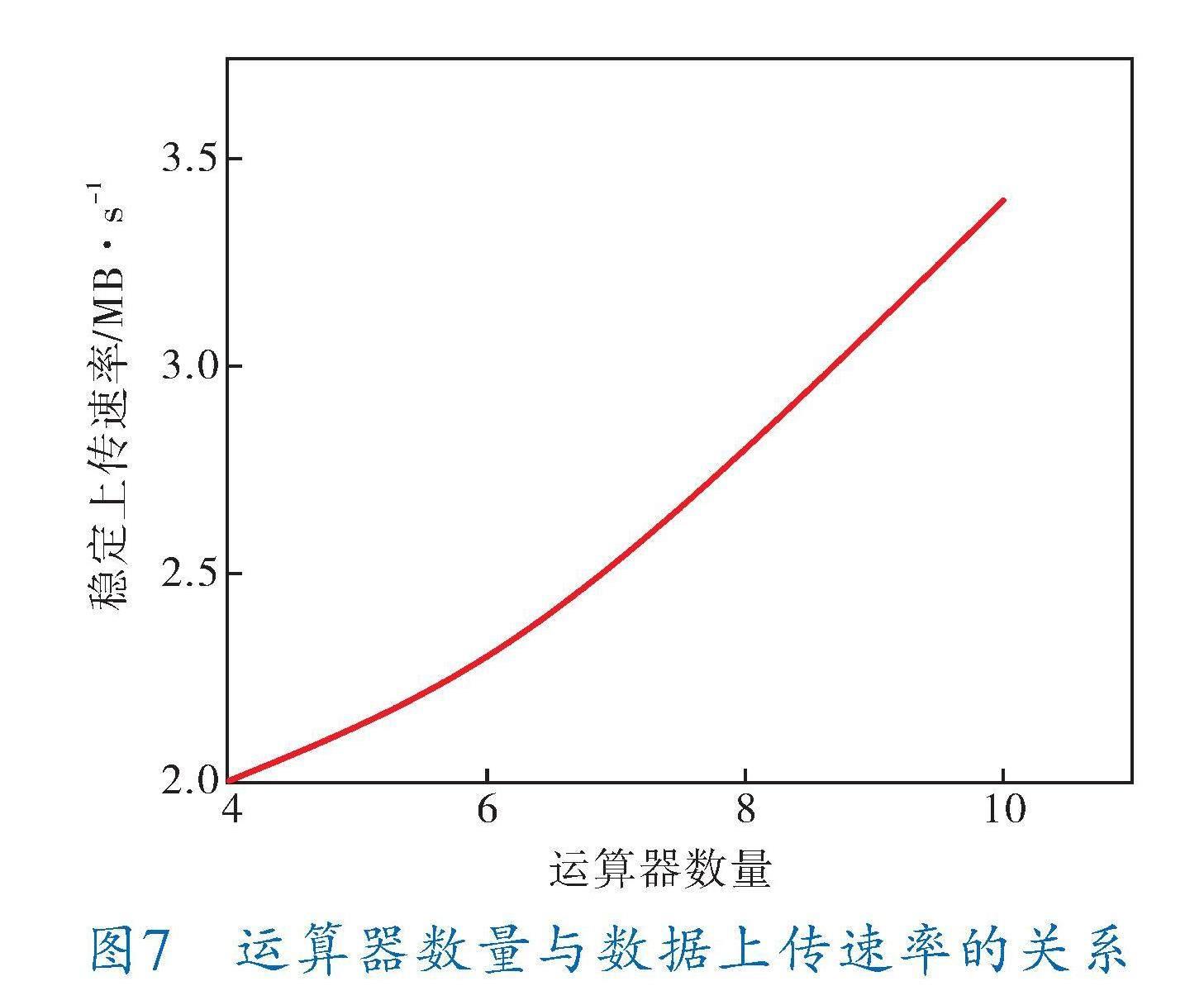
运用图5中4个稳定数据上传速率值拟合得到上传主机运算器数量与上传速率的关系(图7),可见主机运算器数量与上传速率之间为指数关系,随着运算器数量的增加,以片内总线为主要影响因素的数据获取时间对总的上传时间影响程度逐渐变弱,以运算器性能及数量为主要影响因素的上传时间的影响逐渐增强。从侧面反映出运算器数量越多的主机,设计时考虑了片内总线性能与CPU性能匹配的因素,进而提升了主机的整体性能。当运算器数量增加到10时,数据上传速率稳定于约3.4 MB/s。可见,为满足多设备智能感知系统数据实时上传需求,通过升级上传主机配置,提高数据上传速率的方案具有可行性。
4 结论
4.1 多传感器智能感知系统是数据上传算法的物理基础,算法的研究需要与系统数据特征、数据采集方式及上传硬件等相结合。
4.2 趋势值自动采集方式下,使用多线程多行数据上传算法;手动数据采集方式下,使用单进程分页算法能够满足数据实时上传的要求;报警自动采集方式下采用多进程并行算法,可满足单机多传感器智能感知系统所采集的所有数据的实时上传。
4.3 影响多进程并行算法数据上传速率的因素包括时间的并行与空间的并行因素,时间并行因素的影响较小,存在极限阈值;空间并行因素主要取决于运算器数量,通过升级上传主机配置可实现多设备多传感器智能感知系统数据实时上传的目标。
参 考 文 献
[1] 孙红燕,王少华.人工智能及其在电网数字化转型中的应用研究[J].中国管理信息化,2021,24(12):108-109.
[2] 傅磊,曲晓峰.车间智能制造CPS智能服务平台技术研究[J].机械工程师,2022(8):138-141.
[3] KASSIM N,YUSOF Y,NOOR H M,et al.Cloud manufacturing framework based on step?nc machine tool for capturing design and manufacturing data[J].Journal of Physics:Conference Series,2019,1150(1):012026.
[4] BOU?HARB E,LUCIA W,FORTI N,et al.Cyber Meets Control:A Novel Federated Approach for Resilient CPS Leveraging Real Cyber Threat Intelligence[J].IEEE Communications Magazine,2017,55(5):198-204.
[5] 蒲世亮,袁婷婷.基于云边融合的物联网智能服务架构探讨[J].智能物联技术,2018,1(1):1-6.
[6] 刘锐,杨灵运.工业互联网标识解析的行业应用与实践[J].中国集体经济,2021(1):161-163.
[7] 朱海东,陈学文.智能制造背景下数字化设计与制造专业建设路径探索[J].工程技术研究,2022,7(24):134-136;164.
[8] ZHAO Y Q,RAO Y.A CPS?Based Intelligence?Awareness Platform for IT Service Management[C]//2017 Chinese Automation Congress.Piscataway,NJ:IEEE,2017:6668-6673.
[9] 张常宏.基于pcDuino和LabVIEW的矿热炉磁场数据上傳与监测软件系统[D].太原:太原理工大学,2017.
[10] 吴铭淞.动力系统车联网数据上传方式研究[J].汽车与新动力,2022,5(1):55-59.
[11] 陈聪.利用Python、Zabbix和监控实现数据上传[J].网络安全和信息化,2022,74(6):80-84.
[12] 张志佳,于立国,李海滨,等.基于多线程的Linux下并发服务器的实现研究[J].微计算机应用,2007(4):368-371.
[13] LI M,WANG Y T,YANG J,et al.Analysis and Solution of Abnormal Causes of Data Upload in Special Acquisition Terminal[C]//2019 8th International Conference on Advanced Materials and Computer Science.2019:295-300.
[14] 胡英楣,沈文海,宋之光.多進程并发在国内气象通信系统的应用[J].应用气象学报,2007(6):877-884.
[15] ANCKER J S,MAUER E,KALISH R B,et al.Early A?dopters of Patient?Generated Health Data Upload in an Electronic Patient Portal[J].Applied Clinical Informatics,2019,10(2):254-260.
(收稿日期:2023-09-20,修回日期:2024-04-15)
Research on Building Intelligent Perception System for the High?speed Rotating Machinery and Data Uploading Methods
GE Shi?xiang1, LI Na?na1, YANG Lin?jie1, LIU Chun?bo2, CAO Yan?jun1
(1. ZRIME Gearing Technology Co., Ltd.; 2. College of Mechanical and Electrical Engineering,
Henan University of Technology)
Abstract Considering the characteristics of high?speed rotating equipment, a physical intelligent perception system was built and the investigation focused on to how to efficiently upload the sensor data generated by the system. The high?speed rotating equipments physical perception system boasts of multiple acquisition signals and methods and large amount of data. In addition, three data?uploading algorithms were proposed, of which, the multi?threaded multi?line algorithm was applied to SCMs and the upload speed reached 0.06?0.07 MB/s, and it satisfied real?time data upload when the system worked in automatic mode; the single process paging algorithm requires the upload hardware system to be an industrial?grade SCM or an embedded system, and the upload speed reached 0.7?0.8 MB/s, and it complied with real?time data upload when the system worked in manual acquisition mode and the upload rate depended on the number of operators. The upload rate of 10 operators becomes stable at about 3.4 MB/s, which can meet multi?device systems real?time data upload in any data acquisition mode. The analysis in this paper provides a feasible scheme for the digitization of rotating machinery.
Key words high?speed rotating equipment, digitization, optimization algorithm, multi?threading, multi?process
the following two optimization methods were adopted, of them, the SMB technology improved is a Modicon process with variable feed concentration, the latter employs particle swarm optimization to optimize operating parameters of SMB separation process. The results show that, the above two optimization methods can improve both purity and productivity of the separated products.
Key words SMB, separation of ternary components, column configuration, Modicon feeding strategy, PSO
(Continued from Page 522)
