基于图像识别的输电线路轨道运输装备安全检测系统
2024-05-31王海燕侯康
王海燕 侯康
DOI: 10.3969/j.issn.1671-7775.2024.03.011
開放科学(资源服务)标识码(OSID):
摘要: 为了提高林区山地输电线路轨道运输装备运行安全性,搭建基于图像识别的轨道运输装备安全检测系统.首先给出整个林区山地输电线路轨道运输装备电控系统;其次介绍了感知模块系统所用到的各类传感器;然后基于拆分注意力网络和自校准卷积的融合,采用Faster-RCNN算法得到更好的特征提取,并采用此改进的Faster-RCNN算法进行装备周围人员识别试验;最后基于QT开发输电线路轨道运输装备远程控制软件,并实现对装备的远程操控.结果表明:改进的Faster-RCNN算法在林区山地强光照和复杂环境下能够大幅度提高识别装备周围人员的准确性,图像识别平均精度均值mAP可达87.13%,高于常规Faster-RCNN的74.35%和级联Faster-RCNN的76.28%,充分证明改进的Faster-RCNN算法具备优良识别能力,保障林区山地输电线路轨道运输装备安全运行.
关键词: 输电线路建设; 轨道运输装备; 图像识别; 感知系统; 安全检测; 改进的Faster-RCNN; 拆分注意力网络; 自校准卷积
中图分类号: TP23; TP391.4 文献标志码: A 文章编号: 1671-7775(2024)03-0323-07
引文格式: 王海燕,侯 康. 基于图像识别的输电线路轨道运输装备安全检测系统[J].江苏大学学报(自然科学版),2024,45(3):323-329.
收稿日期: 2023-09-21
基金项目: 中国南方电网有限责任公司科技项目(031300KK52190154); 海南省重点研发计划项目(ZDYF2021GXJS213)
作者简介: 王海燕(1983—),女,江西吉安人,高级工程师(94231762@qq.com),主要从事电力系统装备研究.
侯 康(1987—),男,贵州遵义人,高级工程师,博士(通信作者,hk0001876@126.com),主要从事智能算法、自动控制、先进机器人技术研究.
Safety detection system of rail transportation equipment for
transmission lines based on image recognition
WANG Haiyan1, HOU Kang2,3,4
(1. Huizhou Power Supply Bureau, Guangdong Power Grid Co., Ltd., Huizhou, Guangdong 516003, China; 2. School of Mathematical Sciences, Soochow University, Suzhou, Jiangsu 215031, China; 3. Kunshan Industrial Technology Research Institute Co., Ltd., Suzhou, Jiangsu 215316, China; 4. Institute of Semiconductors, Chinese Academy of Sciences, Beijing 100083, China)
Abstract: To improve the operational safety of rail transportation equipment for mountainous transmission lines in forest areas, the safety detection system of rail transportation equipment based on image recognition was established. The electronic control system of rail transportation equipment for mountainous transmission lines in the forest areas was provided, and the various sensors used in the perception module system were introduced. The Faster-RCNN algorithm based on the combination of split-attention networks and self-calibration convolutions was applied to obtain better feature extraction, and the improved Faster-RCNN algorithm was used for the surrounding personnel recognition experiments. The remote control software of rail transportation equipment for transmission lines was developed based on QT, and the remote control of the equipment was realized. The results show that the improved Faster-RCNN algorithm can significantly improve the accuracy of identifying personnel around equipment in strong lighting and complex environments of forest areas. The mean average precision of image recognition can reach 87.13%, which is 74.35% higher than conventional Faster-RCNN and 76.28% higher than cascaded Faster-RCNN. The results fully prove that the improved Faster-RCNN algorithm has excellent recognition ability and ensures the safe operation of railway transportation equipment for mountainous transmission lines in forest areas.
Key words: transmission line construction; rail transportation equipment; image recognition; perception system; safety detection; improved Faster-RCNN; split-attention network; self-calibrated convolution
随着西电东送等越来越多偏远电力资源丰富地区向电力紧缺地区输送电工程的发展,为了减小输送过程中的电力损耗通常通过高压特高压线路经过直线式的远距离输电,都会在偏远林地山区进行高压电塔的建设以保证电力的高效传输,而如何将高压电塔塔材运输到偏远山区的山上建塔地点就成了比较棘手的问题.输电线路塔材相对于山区果物、农物的运输,有运输货物重、临时机动强等特点,所以下面拟对现有的山区运输方式进行分析,以找出一种运输效率高、安全可靠、便于安装拆卸的运输方式.目前,在山区常运输的货物主要是果物、农物和基础设施材料,由于山区崎岖的地形特点,运输问题历来都是研究热点[1-2].山区货物运输以轮式[3]、履带式[4]、无人机[5]以及架空索道[6]等运输方式为主.轮式和履带式运输方式占地面积大,对植被破坏大;无人机运输成本高、飞行时间短;架空索道对安装要求比较高.与上述4种运输方式相比,轨道运输有着明显的优点[7],主要包括: ① 占地面积少,轨道运输方式通常采用在山地上支架支撑、轨道铺设的形式,占用山区地面面积少; ② 适应地形能力强,轨道运输方式通过调节支架高低来减缓运输坡度,实现较强爬坡能力,并且轨道设计时可设置半径小的弯道,适应山区不同的地形环境; ③ 行驶性能好,运输车在轨道上进行行驶,通过牵引机进行牵引,动力足,行驶平稳; ④ 可靠性及安全性好,在山区铺设的轨道上运行,运行起来更安全可靠; ⑤ 安装拆卸用时少,轨道运输装备的支架和轨道都是模块化的部件,在山区安装简单,而且拆卸方便; ⑥ 对植被破坏少,由于轨道运输装备占地面积少,所以对运行路线上的植被破坏小.在山区高压电塔架设过程中,需要将各种输电线路材料搬运到施工现场进行安装,输电线路电塔塔材采用传统的运输方式运输成本高、对山区植被破坏大、对运输的地形要求比较高,相较之下轨道运输方式的优势明显,所以文中采用轨道运输装备实现对输电线路电塔塔材的运输.
在采用轨道运输装备运输输电线路电塔塔材时,由于运输货物重、运行速度快,需要工作人员对轨道运输装备运行状态和周围环境进行观察,当遇到运行安全问题和突发情况需要工作人员手动调控轨道运输装备,以保证装备的安全运行,所以这对工作人员的依赖较大.文中为了实现轨道运输装备的自主运行,通过加载各类传感器,对运输过程中装备的运行情况和周边环境感知和安全检测保证运输的安全性,为输电线路轨道运输装备自动行驶打下坚实的基础.
图像识别大多采用深度学习方法来实现[8-9].Faster-RCNN(region-based convolutional neural network)作为目标检测算法,它使用卷积神经网络进行特征提取,并使用区域建议网络生成一系列候选框(锚点),然后对这些框进行分类和回归,以实现目标检测任务.其他常用的图像检测方法中,YOLO(you only look once)算法具有检测速度快但精度低的特点[10];SSD(single shot multibox detector)算法具有較高的检测速度和较低的计算资源消耗,但其检测小型物体的能力有限;DETR (detection with transformers)具有更高的准确性和鲁棒性,但它需要更多的计算资源和时间[11].与其他物体检测算法相比,Faster-RCNN的优势在于它具有更高的准确性和鲁棒性,适用于检测位于光线强烈、环境复杂的山地林区轨道运输装备周围的物体.尽管SSD、YOLO和DETR算法具有计算速度快的优点,但Faster-RCNN适用于低速运输设备的检测系统.因此,文中将Faster-RCNN算法应用于轨道运输装备周围人员的图像识别.
文中研究的林区山地输电线路轨道运输装备相较于现有的林区山地轨道运输装备具有载荷量大的特点,为了保证运行安全,其在控制的自动化、智能化和可靠性上要求更高.文中首先给出整个林区山地输电线路轨道运输装备电控系统;其次介绍了感知模块系统所用到的各类传感器;然后基于拆分注意力网络和自校准卷积的融合,采用Faster-RCNN算法得到更好的特征提取,并采用此改进的Faster-RCNN算法进行野外强光照、环境复杂的山地林区环境下装备周围人员识别试验;最后基于QT开发输电线路轨道运输装备远程控制软件,并实现对装备的远程操控.
1 轨道运输装备电控系统分析
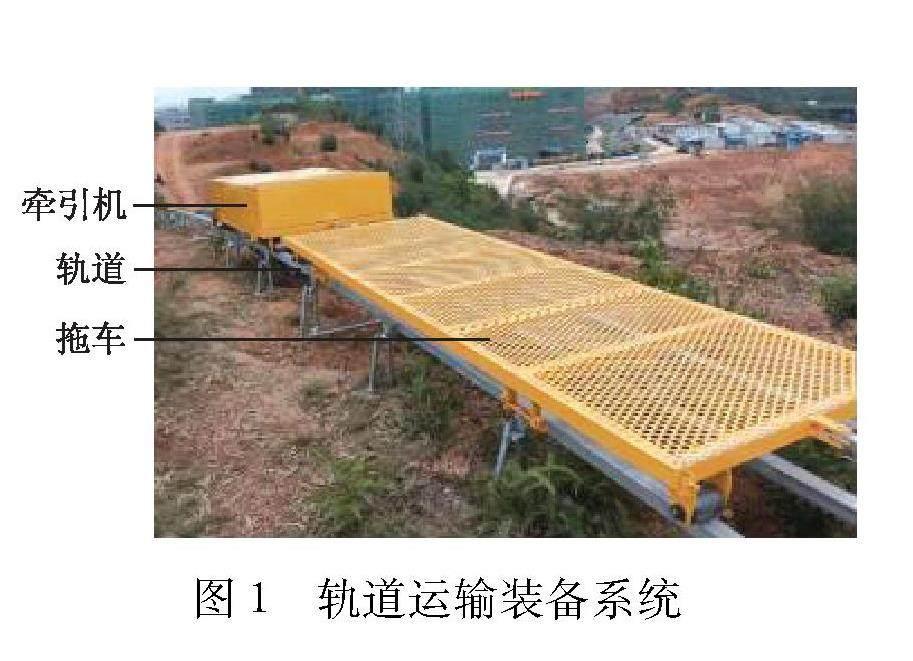
林区山地输电线路轨道运输装备系统主要由牵引机、拖车和轨道(含支架)3部分构成,如图1所示.
拖车主要是用来承载货物,不涉及动力输出,作为从动系统被牵引机牵引运动,其不涉及运动控制,牵引机可以前后运动,所以拖车也可以在轨道上前进和倒退运动.轨道作为载体,牵引机和拖车可以在其上面运动,其也不涉及运动控制,通过地面上支架的支撑实现轨道距地面一定高度,保证装备运行的稳定性.因此,本节主要分析输电线路轨道运输装备牵引机的电控单元.
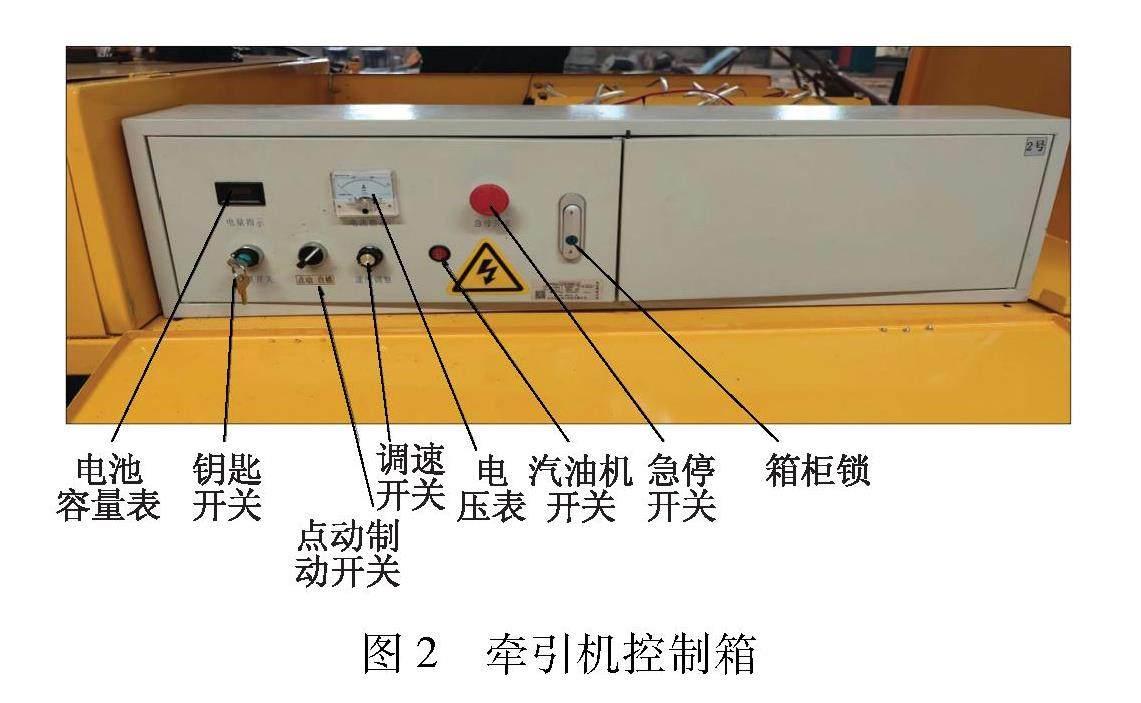
牵引机采用22 kW直流有刷电动机提供动力,72 V电池电源供电;增配汽油增程器,在工作时进行供给电源充电作业,以补充蓄电池电源电量,提高装备的续航时间.在牵引机上安装了控制箱,如图2所示,可以实现对轨道运输装备牵引机的手动控制,并简单显示运行过程中的装备状态情况,主要包含电池容量表、电源钥匙开关、点动制动开关、调速开关、电压表、汽油机开关、急停开关等.
电池容量表显示当前电池总容量,以百分比显示,实时掌握电量情况.点动制动开关实现装备缓慢小步移动,起到短距离调整机器位置的作用.调速开关作用为调整牵引机的行驶速度.电压表显示设备工作电压.汽油机开关作用为控制汽油增程器的启停.紧急制动开关为紧急情况总设备的总电源开关,在紧急情况下可以立即制动.
牵引机控制箱上的速度控制、启动控制还停留在手动控制阶段,后面笔者设计了输电线路轨道运输装备安全检测系统以实现整套装备的自主感知和安全运行,并通过远程控制系统实现远程可视化自动控制.
2 感知模块系统
输电线路轨道运输装备自主控制感知模块系统主要包含6个部分:速度系统、称重系统、环境系统、坡度系统、位置系统和自动停车系统.
速度系统是在装备车轮上加装转速传感器,并由单片机通过传感器得到装备实际速度、计算控制量发送指令给直流电动机驱动器对其进行控制,以此组成控制装备运动速度的闭环.通过在单片机内运行PID算法进行装备速度的闭环控制,输入量为车轮的期望转速和实际转速,输出量为控制电动机运动量,以实现装备在轨道上达到期望的运行速度.
称重系统是对输电线路电塔塔材的质量进行实时监测,一是对单次运输的材料进行称重,避免出现超载情况和记录运载量便于进行工程结算,二是防止运输过程中有输电线路材料遗落而未发现;通过在车厢中加装称重传感器,实时感知输电线路材料的质量.
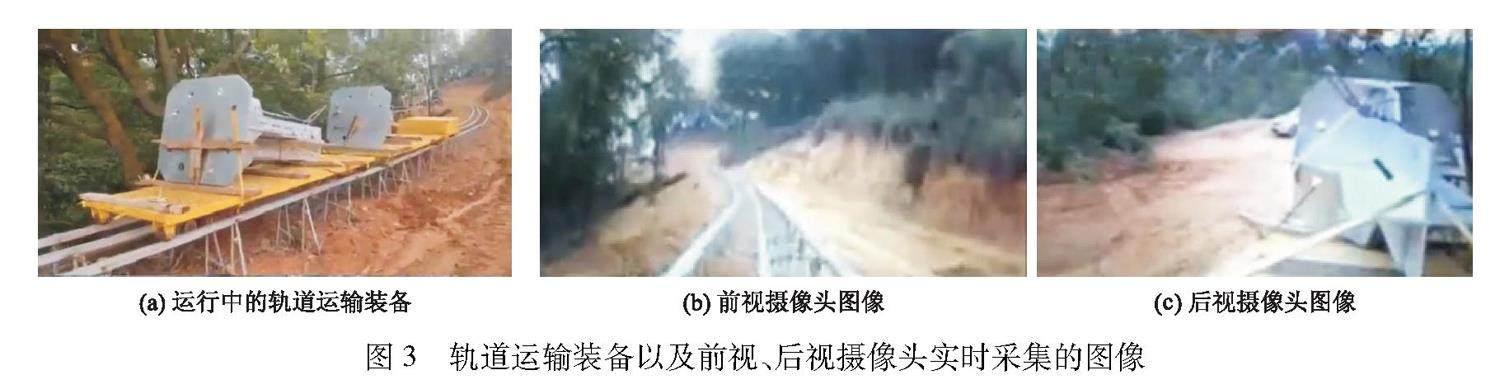
环境系统在牵引机上安装了前视摄像头和后视摄像头,分别用于观察前方运行环境、后方的运输货物和环境,图3为轨道运输装备以及前视、后视摄像头实时采集的图像.
坡度系统采用角度姿态传感器感知整个路线轨道的坡度,通过设计不同的轨道坡度对应不同的速度,这样可以实现在坡度大的地方小速度大力矩通过,在坡度小的地方大速度小力矩通过,以保证装备运行的可靠稳定.
位置系统采用RFID(射频识别)位置感应系统,在轨道上安装位置电子标签并进行编号,牵引机下方安装RFID感应传感器,当牵引机运行到某个位置电子标签上方,感应传感器即可感应到信号,以此获得装备在轨道上的位置信息.
自动停车系统在运输装备运动到目的地后通过限位器进行限位控制,运输装备不再输出动力,并进行电磁刹制动,以实现运输装备的停车.
3 安全检测图像识别
输电线路轨道运输装备在运行过程中,为了保证其运行的安全性,当遇到障碍物时装备应自动感知并进行安全处理.
为了有效地感知运行中装备的周围环境,文中采用图像识别的方法检测周围的异常及障碍物.由于输电线路轨道运输装备的运输质量大,在运行过程中要保证其安全性,尤其须保证周边经过人员要在安全距离外.文中通过摄像头实时识别装备周边人员,然后装备会发出提示音,告知周边人员须远离运行中的轨道运输装备.
文中采用改进的Faster-RCNN算法对轨道运输装备的周边人员进行识别.Faster-RCNN算法[12]主要用于对动态摄像头采集的图像进行目标检测,比如对图像中人员的识别.RCNN和Fast-RCNN通常采用选择性搜索(selective search)提取候选框,这是比较传统的方法,运算耗时比较长.改进的Faster-RCNN基于特征学习,提出区域建议网络 RPN(region proposal network)[13],主要思想是利用Fast-RCNN为RPN提供少而准确的候选边界框,实现了端到端训练,相较于传统的RCNN和Fast-RCNN,提高了目标图像识别的速度和精度[14].
Faster-RCNN是一种目标图像识别算法,可以分为4个主要模块: ① 卷积层通过使用一组基础的卷积线性整流池化层提取图像的特征图,特征图将在后面的RPN层和全连接层用到; ② 区域建议网络RPN用于取代传统的方法来产生区域建议,利用边界框回归修正获得精确的建议; ③ 感兴趣区域池化层收集输入的特征图和建议,综合这些信息后提取建议特征图,送入后续全连接层判定目标类别; ④ 分类器主要是通过全连接层对目标建议分类和对边界框位置进行修正.Faster-RCNN的结构见图4.
在Faster-RCNN中采用RPN提取候选框.RPN耗时少,而且很容易结合到Faster-RCNN中成为一个整体.作为一个全卷积网络,RPN能够同时预测每个位置目标的边界(object bound)和目标;Faster-RCNN使用RPN,通过端到端的训练可以生成高质量的区域建议.
RPN的网络结构见图5.
由图5可见,RPN网络通过滑动窗口生成候选锚点,对应生成256幅特征图,通过分类层的得分参数和回归层的目标参数,并结合预测分类和框位置,剔除越界锚点、框回归偏移,得到真正的建议,作为Faster-RCNN的输入,根据以上信息预测结果.
针对装备运行环境多为山地林区,存在强光照和复杂环境的特点,文中采用改进的拆分注意力网络(split-attention networks, ResNeSt)[15]作为特征提取网络,通过拆分注意力模块将特征映射分割成更小的单元,每个单元的特征由其分割决定的权重来确定,如图6所示,并结合自校准卷积,实现在卷积层的自适应,达到动态变换,得到更好的特征.
采用损失函数训练RPN,将RPN产生的候选框与真实框进行匹配,从而使得RPN能够更好地定位目标.RPN损失函数为
L({pi},{ti})=1Ncls∑iLcls(pi,p*i)+
λ1Nreg∑ip*iLreg(ti,t*i),(1)
Lcls(pi,p*i)=-[p*ilog pi+(1-p*i)log(1-pi)],(2)
Lreg(ti,t*i)=∑iSmoothL1(ti-t*i),(3)
SmoothL1(x)=0.5x2,x<1,
x-0.5,其他,(4)
式中: L({pi},{ti})為RPN损失;Lcls(pi,p*i)为分类损失;Lreg(ti,t*i)为回归损失;pi为真实类别的概率;p*i为建议类别;ti为边界框的修正参数;Ncls为样本数量;Nreg为特征图中像素点数;λ为相关系数.
模型評价采用分类精度AP(average precision)和平均精度均值mAP(mean average precision)作为评价指标.AP是针对单个类别的精度,计算式为
AP=TPTP+FP,(5)
式中: TP、FP分别为真正数、假正数.
mAP是针对总类别的精度,计算式为
mAP=1M∑Mi=1APi,(6)
式中:M为总类别数.
改进的Faster-RCNN在caffe深度学习框架下,在内存32 GB、处理器Intel(R) Core(TM) i7-8750、主频2.2 GHz的运行环境中,通过对大量图像数据模型的训练,针对输电线路轨道运输装备上摄像头的图像识别周边人员.这里使用CUHK-SYSU数据集与现场采集图像数据集相结合来训练模型,现场采集图像数据集包含211张图像和8名现场人员,测试集包含72张图像和5名现场人员.现场采集图像数据集的图像数量远少于CUHK-SYSU数据集,因此对整体训练结果的影响很小.初始学习率设置为10-3,经过100 000次迭代后降至10-4,改进的Faster-RCNN的mAP达到了87.13%,高于常规Faster-RCNN的74.35%和级联Faster-RCNN的76.28%.上述3种算法的训练损失曲线见图7.
由图7可见,改进的Faster-RCNN算法相较于常规Faster-RCNN和级联Faster-RCNN的训练收敛速度更快,而且损失值更小.
改进的Faster-RCNN算法识别效果如图8所示.
由图8可见,通过大量的图像数据训练以后,改进的Faster-RCNN可以在山地林区复杂环境下有效识别运行装备周边的人员,充分证明了其具有优良的识别能力.当装备识别到周边人员时会发出提示音,告知周边人员远离正在运输作业的轨道运输装备.
4 远程控制系统界面
文中基于QT开发远程控制软件,实现远程用户与轨道运输装备关于运行状态和感知信息的数据交互,系统界面见图9.
输电线路轨道运输装备远程控制系统功能如下:控制轨道运输装备前视、后视摄像头的开关,并显示前向情况和运输材料情况;设置路线,选择轨道运输装备运行的线路;设置速度,轨道运输装备的运行速度设定范围为0.3~1.2 m/s;查看记录,可以看到设置信息、查询操作记录;轨道装备实时位置图,显示装备位置;实时显示轨道运输装备的运行速度、载荷重量、坡度、位置信息、运行里程;切换到手动控制,通过切换键控制手动、自动两种模式;停止键,按下后轨道运输装备停止运行;前进、后退键,可以控制装备前进或后退;紧急停车按钮,可以实现突发情况下的急停,可以解除急停恢复正常运行状态.
5 结 论
1) 文中深入研究输电线路轨道运输装备安全检测系统,对输电线路轨道运输装备电控系统和感知模块系统组成进行分析,为后续装备的自动安全运行打下坚实的基础.
2) 基于图像识别,采用拆分注意力网络和自校准卷积相结合的改进Faster-RCNN算法针对野外复杂环境下运行过程中的轨道运输装备周边人员识别,其mAP达到了87.13%,高于常规Faster-RCNN的74.35%和级联Faster-RCNN的 76.28%,具有优良的识别能力.
3) 基于QT开发输电线路轨道运输装备远程控制软件,采集装备的各类运行与感知数据,实现输电线路轨道运输装备远程操控,提高其运行安全性和可靠性.
[WT5HZ]参考文献(References)[WT5”BZ]
[1] 张巍,庹洪章,易文裕,等.丘陵山地农业运输装备发展现状及展望[J].南方农机,2020,51(11):9-11,17.
ZHANG W, TUO H Z, YI W Y,et al. Development status and prospect of agricultural transport equipment in hilly and mountainous areas[J]. Forum of South China, 2020, 51(11): 9-11,17. (in Chinese)
[2] 康柳江,李浩,孙会君,等.复杂山区工程建设物资运输无人机巡航模型构建与实证研究[J].交通运输系统工程与信息,2023,23(3):290-299.
KANG L J, LI H, SUN H J, et al. UAV cruising for material transportation under engineering construction in complex mountainous areas: modeling and case study[J]. Journal of Transportation Systems Engineering and Information Technology, 2023,23(3):290-299. (in Chinese)
[3] 王雅慧,化梦康,张帅昌,等.山地农林运输车的现状分析及研究[J].农业与技术,2022,42(10):53-57.
WANG Y H, HUA M K, ZHANG S C, et al. Analysis and research on current situation of mountainous agricultural and forestry transport vehicles[J]. Agriculture and Technology,2022,42(10):53-57. (in Chinese)
[4] 周汉林,刘华,陈中武,等.丘陵山地履带式多功能底盘的设计[J]. 现代农业装备,2021,42(5):56-59.
ZHOU H L, LIU H, CHEN Z W, et al. Development of tracked multifunctional chassis in hilly and mountainous regions[J]. Modern Agricultural Equipment, 2021,42(5):56-59.(in Chinese)
[5] 巫茜,黄浩,曾青,等.改进ACO算法的UAV航迹规划在山区物流配送中的应用研究[J].重庆理工大学学报(自然科学),2022,36(10):185-191.
WU Q, HUANG H, ZENG Q, et al. Application of UAV trajectory planning based on improved ACO algorithm in mountain logistics[J]. Journal of Chongqing University of Technology (Natural Science), 2022,36(10):185-191. (in Chinese)
[6] 刘晓立,祝军超,张媛,等.山区架空线路工程运输方式经济性分析[J].中国电力企业管理,2021(36):74-75.
LIU X L, ZHU J C, ZHANG Y, et al. Economic analysis of transportation methods for overhead line enginee-ring in mountainous areas [J]. China Power Enterprise Management, 2021(36):74-75. (in Chinese)
[7] 吴建芳,侯康,王海燕.基于多目标遗传算法的林地山区轨道运输装备结构设计与优化[J].中国电子科学研究院学报,2023,18(1):66-71.
WU J F, HOU K, WANG H Y. Structural design and optimization of transmission line rail transportation equipment based on multi-objective genetic algorithm in woodland mountainous area [J]. Journal of CAEIT, 2023,18(1):66-71. (in Chinese)
[8] 李晓峰,任杰,李东.基于深度强化学习的移动机器人视觉图像分级匹配算法[J].吉林大学学报(理学版),2023,61(1):127-135.
LI X F, REN J, LI D. Hierarchical matching algorithm of visual image for mobile robots based on deep reinforcement learning[J]. Journal of Jilin University (Science Edition), 2023,61(1):127-135.(in Chinese)
[9] 徐茂竹,李弘,李亚光,等.单目视觉引导下的无人艇局部避障方法[J].重庆邮电大学学报(自然科学版),2023,35(4):732-741.
XU M Z, LI H, LI Y G, et al. Local obstacle avoidance for unmanned surface vehicle via monocular vision[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition),2023,35(4):732-741. (in Chinese)
[10] 刘瀚文,王红霞,周奎,等.YOLOv4-tiny网络夜间行人检测算法研究[J].重庆邮电大学学报(自然科学版),2023,35(5):908-915.
LIU H W, WANG H X, ZHOU K, et al. Research on nighttime pedestrian detection algorithm for YOLOv4-tiny network[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition),2023,35(5):908-915. (in Chinese)
[11] CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers[C]∥Proceedings of the 16th European Conference on Computer Vision. [S.l.]:Springer Science and Business Media Deutschland GmbH,2020:213-229.
[12] 魏业文,李梅,解园琳,等.基于改进Faster-RCNN的输电线路巡检图像检测[J].电力工程技术,2022,41(2):171-178.
WEI Y W, LI M, XIE Y L, et al. Transmission line inspection image detection based on improved Faster-RCNN[J]. Electric Power Engineering Technology, 2022, 41(2): 171-178. (in Chinese)
[13] 汪常建,丁勇,盧盼成.融合改进FPN与关联网络的Faster R-CNN目标检测[J].计算机工程, 2022, 48(2): 173-179.
WANG C J, DING Y, LU P C. Object detection using Faster R-CNN combining improved FPN and relation network[J]. Computer Engineering, 2022,48(2):173-179. (in Chinese)
[14] 郭兰申,李杨,黄凤荣,等.融合引导锚框算法的Faster-RCNN缺陷检测[J].机械设计与制造,2022(4):160-164.
GUO L S,LI Y,HUANG F R, et al. Faster-RCNN part defect detection based on guided anchoring algorithm[J]. Machinery Design & Manufacture, 2022(4):160-164. (in Chinese)
[15] ZHANG H, WU C R, ZHANG Z Y, et al. ResNeSt: split-attention networks[C]∥Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway:IEEE Computer Society, 2022:2735-2745.
(责任编辑 梁家峰)