基于 ADAMS 的纱筒换料抓取机械臂力学特性分析与仿真
2024-05-24林先晶戴程浩江维彭思远陈振
林先晶 戴程浩 江维 彭思远 陈振

摘要:利用機械臂代替人工完成大型织机车间纱筒换料任务,可以降低企业用工成本,提高生产效率,然而传统机械臂基座通常固定于地面,作业区域受限,使用率低。由此,本文设计出一种将AGV小车与六自由度抓取机械臂相结合的纱筒自动换料智能化装备的基本构型,提出了纱筒自主换料作业运动规划,相比于传统的换料方式,本系统在纱筒换料作业中更为灵活。在纱筒抓取过程中抓取机械臂与纱筒之间存在力的接触,抓取力的控制是完成抓取作业的关键,基于此,本文在传统拉格朗日法的基础上结合非线性阻尼力与非线性弹性力的影响推导建立了此六自由度机械臂的动力学方程,利用ADAMS软件建立纱筒换料六自由度抓取机械臂的动力学仿真模型,通过动力学仿真模拟作业流程,利用后处理功能获取各关节力学曲线验证机械臂抓取的可靠性。仿真结果表明:纱筒换料六自由度抓取机械臂作业过程中,单个关节位移最大值约为1.3 m,运动最大速度为0.4 m/s,能够满足织机车间纱筒换料的生产需要,运动阶段转换时关节加速度变化值基本保持在0.05 m/s2,受力稳定,抓取换料平稳可靠,这对企业提高自动化程度,实现高质量发展具有重要理论参考价值。
关键词:纺织车间;纱筒换料;抓取机械臂;拉格朗日方程;动力学特性
中图分类号:TP242 文献标志码:A 文章编号:2097-2911-(2024)02-0028-12
Mechanical characterization and simulation of yarn cylinderchanging with robot gripping arm based on ADAMS
LINXianjing a, DAI Chenghaoa , JIANG Weiab*, PENG Siyuana, CHEN Zhenab
(Wuhan Textile University a.School of Mechanical Engineering and Automation ; b. Hubei Provincial Key Laboratory ofDigital Textile Equipment, Wuhan Textile University, Wuhan 430200, China)
Abstract: The use of robotic arms instead of manual labor to complete the task of changing yarn cylinders in large-scale weaving machine workshops can reduce enterprises' labor costs and improve production efficiency. However, traditional robotic arms are usually fixed to the ground, restricting their operating area and leading to low utilization rates. Thus, this paper designs a basic configuration of intelligent equipment for automatic yarn cylinder material changing, which combines an AGV cart and a six-degree-of-freedom robotic gripping arm. It also proposes motion planning for autonomous yarn cylinder material changing operations, offering greater flexi- bility compared to traditional methods. In the process of gripping the yarn cylinder with the robotic arm, there is force contact between them, and controlling the gripping force is crucial to completing the operation. Based on this, this paper combines the traditional Lagrangian method with the influence of nonlinear damping force andnonlinear elastic force to derive the kinetic equations of the six degrees of freedom robotic arm. The ADAMS software is then utilized to establish a dynamics simulation model for the six degrees of freedom yarn cylinder changing with robotic gripping arm. Through kinetic simulation, the operation process is simulated, and post- processing functions are used to obtain mechanical curves for each joint to verify the reliability of the robotic arm's gripping mechanism. The simulation results indicate that during the operation process of the six-degree-of- freedom gripping manipulator for spool material replacement, the maximum displacement of a single joint is ap- proximately 1.3 meters, and the maximum motion speed is 0.4 meters per second. This is sufficient to meet the production needs of spool material replacement in weaving machine workshops. During the transition between motion stages, the change in joint acceleration remains generally around 0.05 m/s2 , ensuring stable force and re- liable gripping and material replacement. This has important theoretical reference value for enterprises to im- prove automation and achieve high-quality development.
Keywords:textile workshop;cylinder change;gripper arm;Lagrange equation;dynamic properties
在全球纺织品贸易发展中,中国自古以来都起着举足轻重的作用,从古老的丝绸之路到“一带一路”倡议,中国纺织行业[1]的发展也代表着中国制造业在高质量发展道路上的伟大飞跃。纱架[2]是纺织行业车间生产线上不可或缺的重要设备之一,其主要功能是为生产好的纱线提供支持和引导作用,防止纱线在传递工序中相互干涉而发生缠绕,在一些大型织机运转的车间中,单个纱架需要同时为多个纱筒提供作业环境。传统的纱筒上下料主要依赖人工进行搬运。在纺纱开始之前的准备工作中,工人需要将空白纱筒逐一安装到纱架上;或在纺织进程中的某一时刻,当纱线使用完毕后,工人需要将空白纱筒从纱架上取下。然而人工作业效率低,工人安全隐患高,劳动强度大[3],对于产量需求日益增长的企业来说,此作业方式难以满足生产需要,亟待研发一种自动化设备以协助或代替人工完成作业任务。目前,机械臂技术已经被大量投入到工业生产中,机械臂机械手承载能力强、定位准确性高、移动灵活性好,是众多科学领域研究的先进集成,同时AGV小车成本可观且应用简单可靠,由此,将AGV小车与多自由度机械臂相结合能有效地实现纺织车间大型织机的纱筒换料的自动化操作,提高生产效率[4-6]。在纺织车间中,使用机械臂抓取与搬运物料需首先考虑其可靠性,那么就要求机械臂末端搭载的机械手具有可靠的抓取力学特性,而机器人机械臂动力学是力学特性分析的基础[7],因此研究抓取机械臂构型及抓取动力学特性具有重要理论意义。
利用抓取机械臂协助大型织机完成生产任务的技术发展地十分迅速。在机械臂实物研发方面,1976年 KUKA 公司发布了第一代工业机器人,随着视觉识别技术的发展,KUKA机械臂在纺织行业中被用于识别不同类别的织物,并根据要求折叠和堆放;2012年 SoftWear Automation 公司发布了自动缝纫机器人 SewbotTM,此机器人可以完成多种缝纫任务,几年后引入了抓取搬运机器人,以协助搬运和处理纺织品,使整个纺织生产的自动化水平更进一步;2015年ABB公司推出多自由度双臂协同机器人YuMi,该机器人动作灵巧,操作精度高,甚至可以穿针引线[8-10]。对机械臂进行动力学建模分析是衡量机器人系统可靠和稳定程度的重要参考标准。在动力学建模与特性分析方面,文献[11]以高斯原理为基础,对非理想条件下的动力学模型进行了优化,但该优化模型能否实际应用于带控制的多体系统并未得到验证;文献[12]将 Euler-Lagrange 方程与有限元法相结合,推导出了柔性机械臂的动力学方程,提高了FE方法的精度和性能,但该方法在计算上较为复杂,求解所需时间较长;文献[13]基于Newton-Euler 方法提出了空间被动过约束并联机构的动力学建模方法,此方法是动力学建模在该领域研究的一个重要创新点,但在二维平面下,该方法无法求解;文献[14]基于Kane- Huston方法并结合旋量理论推导出了双臂机器人动力学方程,提高了计算效率,但此模型在未知运动参数的条件下并不适用。
基于上述分析,本文提出一种利用AGV 小车搭载六自由度抓取机械臂协助纺织车间大型织机完成纱筒换料作业的新方法。由此,设计了虚拟样机模型,综合考虑对关节驱动造成影响的非线性力,推导了抓取机械臂动力学模型的矢量形式,使用ADAMS软件对构建的纱筒换料六自由度抓取机械臂进行力学特性分析与仿真,调整机械臂的位姿得到最佳运动参数。本文提出的纱筒换料作业方式充分利用了AGV小车和多自由度机械臂的优点,其对于实现纺织车间灵活生产、提高大型织机的生产效率、降低人工成本,特别是对纺织车间纱筒自动换料智能化装备的开发具有重要理论意义与实际应用价值。
1织机车间抓取机械臂动力学建模与分析
1.1织机车间抓取任务分析与纱筒换料作业系统整体设计
纺织车间大型设备多,人员流动性高,增添新仪器需考虑其在作业时对其他因素的干扰性,多自由度抓取机械臂灵活性好,作业过程中通过各关节运动能避免与其他重要设备发生干涉,而 AGV 系统在作业前就可规划好行进路线,AGV 小车即使搭载了机械臂也依然能维持住较高的稳定性[15-17],这对于保证车间内的人员安全,维持作业秩序稳定具有积极作用。当 AGV 小车按照给定的路线到达指定工作地点后,六自由度机械臂利用末端执行器开始进行换料作业,作业完毕后搭载六自由度机械臂的 AGV 小车可自行移动到下一工位继续作业,大大地提升了机械臂的使用率,而搭载物料盘的 AGV 小车的轮替运料,保证了供料和卸料的衔接性,提高了车间生产的效率。由此,提出以下构型,自动化纱筒换料六自由度抓取机械臂系统由纱架、纱筒、六自由度机械臂、末端夹具、视觉识别系统、物料盘、AGV小车组成。AGV小车用来搭载机械臂和物料盘到达指定区域进行作业,該机械臂共有六个相互独立的关节,机械臂末端的夹具抓取纱筒完成换料,末端夹具共有3个,每个间隔120° , 物料板用于存放物料,纱筒换料作业系统整体设计如图1所示。
1.2纱筒自动上料作业运动规划
以纱筒上料作业为例,首先,AGV小车在接收到物料更换的指令后通过磁导航传感器到达指定作业区域,如图2(a),同时RFID系统会实时更新小车的坐标信息,收到开工指令后,机械臂由待机状态开始作业,通过视觉识别器精准识别纱筒定位,机械臂末端夹具夹取纱筒顶部带动其运动,如图2(b),纱筒在空中逐渐倾斜的过程中,机械臂末端的稳定杆伸出至纱筒底部半径最大处将其托住以保证抓取过程中的稳定性,如图2(c)。纱筒与纱架定位完成后,稳定杆收回,末端夹具松开,如图2(d),至此已完成一个纱筒的自动上料。此后机械臂将运动至下一纱筒抓取定位处,如图2(e),往复以上过程直至完工。若上料过程中纱筒提前用完,搭载空物料板的小车则会自行变道离开,满载物料的小车将会前往接替作业,,或运动至下一区域进行作业,如图2(f)。完整的换料流程如图2所示。
1.3抓取机械臂坐标系建立
为了获取抓取机械臂运动控制和操作所需要的位置和姿态信息,需要对抓取机械臂建立坐标系,如图3所示。根据抓取机械臂的模型,求得机械臂系统的D-H参数[18]如表1所示,其中,a 表示当前关节到下一个关节之间的公垂线的长度,α表示当前关节到下一个关节之间z轴的扭角,d 表示了前一个关节到当前关节之间公垂线的距离,θ表示了前一个关节和当前关节之间绕 z轴的旋转角。
1.4基于拉格朗日法的抓取机械臂动力学模型建立
根据机械臂的D-H参数表,可将各关节变换矩阵表示为方程(1).
其中,i表示机械臂关节号,按顺序将方程(1)中的 i -i1T 相乘,可以得到机械臂基座与末端执行器之间的变换关系,如公式(2)。
其中,R=[n o a]代表末端执行器的旋转矩阵,P=[px py pz]T 代表末端执行器的位置矢量。
在此机械臂系统中,系统的动能K可表示为公式(3),各传动杆的势能P可用公式(4)来表示,用求迹(tr)表示矢量點乘。
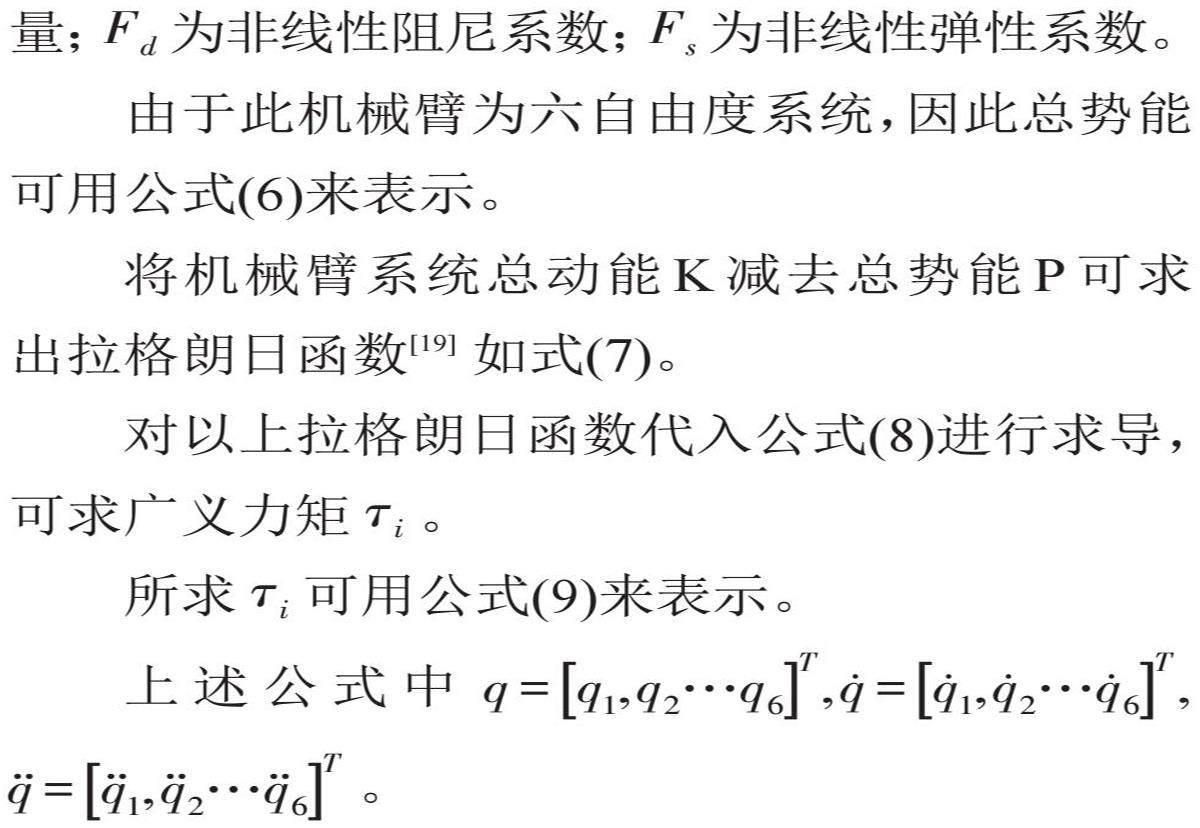
其中,I i(ˉ)为传动杆 i 的附加惯性矩阵,I i(ˉ)= irirTdm ,可用式(5)来表示;q为关节位置;q(?)为关节速度;Iai 为等效惯性矩;mi 为传动杆i的质量; g =[gx gy gz 0] 为重力行矢量;pci =[x(ˉ)i y(ˉ)i z(ˉ)i 1]T 为第i个传动杆的质心位置矢量;Fd 为非线性阻尼系数;Fs 为非线性弹性系数。
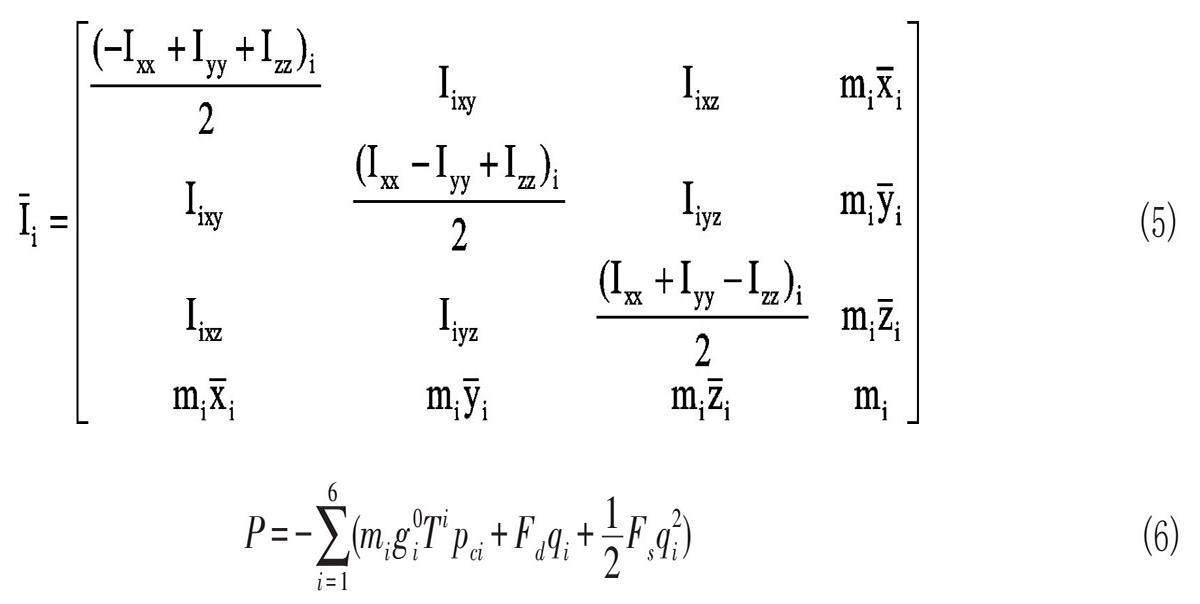
由于此机械臂为六自由度系统,因此总势能可用公式(6)来表示。
将机械臂系统总动能 K 减去总势能 P 可求出拉格朗日函数[19]如式(7)。
对以上拉格朗日函数代入公式(8)进行求导,可求广义力矩τi 。
所求τi 可用公式(9)来表示。
上述公式中 q =[q1,q2…q6]T , q(?)=[q(?)1, q(?)2…q(?)6]T , q(?)=[q(?)1, q(?)2…q(?)6]T 。
将式(9)用矢量形式表达,则可以写成公式(10).
其中,τ为广义力矩矢量,τ=[τ1, τ2…τ6]T ;C(q, q(?)) 为科里奥利力和离心力矩阵,C(q, q(?))q(?)=[τ1k, τ2k …τ6k]T ; M(q) 为惯性矩阵,M(q)q(?)=[τ1g , τ2g …τ6g]T ; G(q) 为重力矢量,G(q) =[τ1z , τ2z…τ6z]T ; H(q, q(?)) 为额外外部力的向量,H(q, q(?)) =Fd q(?)+Fs (q(?)) ; i 为机械臂关节i角加速度。
联立公式(9)与公式(10)可得出此六自由度机械臂各关节的运动方程,如式(11)-(16)。
2基于ADAMS 的织机车间抓取机械臂力学特性仿真
2.1 ADAMS仿真环境的搭建
在 Inventor 中将三维虚拟样机模型转化为二进制格式后导入进 ADAMS 仿真软件中,为不同的零件分配材料使之具有各自相对应的质量参数属性,利用布尔操作将多个零件联合在一起以提高计算效率、减少仿真运行所需的时间,为关节设置运动副来约束运动,机械臂各关节均为旋转关节,因此添加转动副,末端夹具与稳定杆在抓取纱筒过程中分别在X轴与Y轴上位移,因此添加移动副,此外,还需为纱筒与末端夹具、稳定杆、物料盘、纱架分别添加摩擦接触以模拟真实工况,最后编写 STEP函数以驱动关节按预定的轨迹进行仿真。设置完成后的 ADAMS模型如图4所示,抓取机械臂部分主要参数如表2所示。
2.2六自由度机械臂关节力学特性曲线
ADAMS仿真环境默认使用笛卡尔坐标系[20],此次仿真中机械臂在重力方向为Y 轴,AGV 小车前进方向为X轴,纱架上纱杆的水平朝向为Z 轴。利用ADAMS 的后处理功能绘制六自由度抓取机械臂在抓取纱筒作业过程中的结果曲线,关节6的仿真位移结果曲线如图5所示,速度结果曲线如图6所示,加速度结果曲线如图7所示。通过分析关节6的位移结果曲线可知,从0-1.4 s机械臂向下抓取纱筒到1.9-28.5 s 纱筒脱离物料板至纱架前定位的位移过程中,关节6在三个方向上的位移曲线较为光滑且无突变,在28.5-35.0 s机械臂最后放置纱筒的过程中曲线也较为平稳,由此可见纱筒在安装至纱架过程中并未受到纱架杆的干涉而发生抖动,抓取机械臂能较流畅地完成纱筒取放任务。从关节6的速度与加速度曲线可以看出,0-1.4 s 内机械臂从启动到末端夹具定位过程中受到重力影响加速度曲线在 Y 轴上变化明显,但是曲线没有抖动,1.4-1.9 s机械臂停止转动末端夹具开始夹取纱筒,因此速度与加速度都为零,1.9-28.5 s 速度为0、加速度直线变化的曲线代表机械臂关节停止上一时刻转动稳定臂身来衔接下一动作指令,其中1.9-7.9 s机械臂需将纱筒由竖直摆放转变为空间横向摆放,机械臂所需驱动力增大,因此加速度也较大,28.5-35.0 s机械臂逐步放置纱筒,机械臂受力发生变化因此加速度曲线在Y、Z轴上变化明显。总体来看速度曲线平滑,加速度曲线收敛,抓取机械臂作业过程稳定。
2.3末端夹具力学特性曲线
机械臂末端共有3个夹具,仿真中夹具之间设有耦合副,行程参数一致,因此选择一个末端夹具进行分析即可。根据图8末端夹具位移结果曲线可以看出,1.4-1.9 s 夹取纱筒过程与30.5-35.0 s 放置纱筒松开夹具过程中末端夹具在XZ 平面上比机械臂关节多移动了50 mm, 1.9-35.0 s 的位移曲线与关节6位移曲线走势相同,抓取与搬运过程末端夹具没有发生回弹,表明接触刚度设置合理。而末端夹具的速度与加速度结果曲线与关节6基本相同,因此不再罗列。速度曲线平滑稳定,加速度曲线在纱筒抓取与放置的时刻变化较大,曲线整体呈收敛趋势,与上述关节6的曲线相对应,表明末端夹具在抓取纱筒的运动过程中,纱筒没有发生滑移,即使在纱筒克服重力由竖直转为横躺状态的运动中,抓取机械臂以及末端也没有发生抖动,整个物料抓取过程中末端控制稳定、纱筒受力稳定,结果可靠。
3结论
(1)本文提出了一种利用六自由度抓取机械臂协助大型织机车间实现纱筒自动换料的新方法,将AGV小车作为载体使机械臂移动更为灵活,提高了机械臂的效率,实现纺织车间的降本增效。
(2)本文建立了纱筒换料六自由度抓取机械臂的拉格朗日动力学模型,为机械臂的控制算法以及运动规划设计提供了理论基础,从而实现机械臂系统的精确控制,使得机械臂系统在纺织车间中更高效地完成纱筒换料作业任务。
(3)本文建立了纱筒换料六自由度抓取机械臂的虚拟样机模型,在ADAMS软件中对纱筒换料过程进行了仿真,获取了机械臂关节运动特性曲线,通过分析可知纱筒换料过程稳定可靠,验证了本文建立的机械臂动力学模型的正确性。
参考文献:
[1]刘雅婷, 陈文晖.我国纺织服装产业发展的回顾、成效与展望——写于改革开放四十五周年之际[J].价格理论与实践, 2023, (11):88-92.
LIU Yating, CHEN Wenhui. Review, Effective- ness and prospect of the development of China's textile and clothing industry--celebrating the forty- fifth anniversary of reform and opening up[J]. Price Theory and Practice,2023, (11):88-92.
[2]屠佳佳, 孙磊.圆纬机纱架自动换筒A技术[J].纺织学报, 2022, 43(7):178-185.
TU Jiajia, SUN Lei. Automatic change technology of yarn frame for circular weft machine[J]. Textile Journal, 2022, 43(7):178-185.
[3]孙磊, 屠佳佳, 毛慧敏, 等.针织智能车间自动换筒任务调度技术[J].纺织学报, 2023, 44(12):189-196.
SUN Lei, TU Jiajia, MAO Huimin, et al. Automat- ic cylinder change task scheduling technology in knitting intelligent workshop[J]. Textile Journal, 2023, 44(12):189-196.
[4]陈雨, 石亚磊, 胡亚凯, 等.自行走式缠绕包装机器人运动学建模与仿真[J].机械传动, 2023, 47(7):149-155.
CHEN Yu, SHI Yalei, HU Yakai, et al. Kinematic modeling and simulation of a self-propelled wrap- around packaging robot[J]. Mechanical Transmis- sion, 2023, 47(7):149-155.
[5]樊虹岐, 陳海军, 吕丞干, 等.基于ROS的工业机器人及AGV的视觉协同控制系统[J].组合机床与自动化加工技术, 2023, (11):121-127.
FAN Hongqi, CHEN Haijun, Lv Chenggan, et al. Visual cooperative control system for industrial ro- bots and AGVs based on ROS[J]. Combined Ma- chine Tools and Automated Machining Technolo- gy, 2023, (11):121-127.
[6]邹亮, 吴晓, 袁勤政.一种自动循迹AGV平台机械结构设计及力学分析[J].武汉纺织大学学报, 2023, 36(5):53-57.
ZOU Liang, WU Xiao, YUAN Qinzheng. Mechan- ical structure design and mechanical analysis of an automatic trajectory AGV platform[J]. Journal of Wuhan Textile University,2023,36(5):53-57.
[7]毛盾, 邹德华, 江维, 等.高压双分裂输电线路四轮机器人动力学建模与仿真研究[J].武汉纺织大学学报, 2021, 34(2):15-20.
MAO Dun, ZOU Dehua, JIANG Wei, et al. Dy- namic modeling and simulation of four- wheeled robot for high- voltage double- split transmission line[J]. Journal of Wuhan Textile University, 2021, 34(2):15-20.
[8]LI C X, ZHU S, SUN Z B, et al. BAS Optimized ELM for KUKA iiwa Robot Learning[J]. IEEE Transactions on Circuits and Systems II: ExpressBriefs, 2021, 68(6):1987-1991.
[9]GRAHAM- ROWE, D. Robot tailoring: stitched by the sewbot[J]. New Scientist, 2011, 210(2817):46-49.
[10]张玉强, 赖惠鸽.基于运动性能分析的双臂冗余度机器人协调运动研究[J].智能系统学报, 2020, 15(5):856-863.
ZHANG Yuqiang,LAI Huige. Research on coor- dinated motion of dual- arm redundancy robot based on motion performance analysis[J]. Jour- nal of Intelligent Systems,2020, 15(5):856-863.
[11]姚文莉, 刘彦平, 杨流松.基于高斯原理的非理想系统动力学建模[J].力学学报, 2020, 52(4):945-953.
YAO Wenli, LIU Yanping,YANG Liusong. Dy- namic modeling of nonideal system based on Gauss's principle[J]. Chinese Journal of Theoreti- cal and Applied Mechanics.2020.52(4):945-953.
[12]M.O TOKHI, Z.MOHAMED. Finite difference and finite element approaches to dynamic model- ing of a flexible manipulator[J]. Journal of Sys- tems & Control Engineering, 1997,211(2):14-146.
[13]李永泉, 郭雨, 张阳, 等.基于牛顿欧拉法的一种空间被动过约束并联机构动力学建模方法[J].机械工程学报, 2020, 56(11):48-57.
LI Yongquan, GUO Yu, ZHANG Yang, et al. A method for modeling the dynamics of a spatially passive over- constrained parallel mechanism based on the Newtonian Eulerian method[J]. Journal of Mechanical Engineering,2020,56(11):48-57.
[14]殷志锋, 葛新锋.基于Kane方法的双臂空间机器人动力学分析[J].机械科学与技术, 2012, 31(8):1344-1348.
YIN Zhifeng, GE Xinfeng. Dynamics analysis of a two-arm space robot based on the Kane method [J]. Mechanical Science and Technology,2012,31(8):1344-1348.
[15]陈翔, 袁红兵, 姚万里.基于AGV的棉桶搬运系统设计[J].制造业自动化, 2020, 42(9):127-129.
CHEN Xiang, YUAN Hongbing, YAO Wanli. Design of cotton drum handling system based on
AGV[J]. Manufacturing Automation, 2020, 42(9):127-129.
[16]張洪, 魏毅, 陈瑞, 等.整经机筒子架自动换筒机器人系统研发[J].上海纺织科技, 2020, 48(6):10-16.
ZHANG Hong, WEI Yi, CHEN Rui, et al. Re- search and development of automatic cylinder changer robot system for warping machine cylin- der frame[J]. Shanghai Textile Science and Tech- nology, 2020, 48(6):10-16.
[17]龚闯, 戴程浩, 江维, 等.基于改进A*算法的大型织机车间运载机器人路径规划[J].纺织工程学报, 2023, 1(5):57-67.
GONG Chuang, DAI Chenghao, JIANG Wei, et al. Path planning for large-scale loom shop trans- port robot based on improved A * algorithm[J]. Journal of Textile Engineering, 2023, 1(5):57-67.
[18]郑明亮.立体织机打纬机构动力学方程的对称性解法[J].武汉纺织大学学报, 2017, 30(6):37-43.
ZHENG Mingliang. Symmetry solution of dy- namic equations of weft beating mechanism of stereo loom[J]. Journal of Wuhan Textile Univer- sity, 2017, 30(6):37-43.
[19]LI X P,FAN X, SHANG DY , et al. Dynamic per- formance analysis based on the mechatronic sys- tem of power transmission line inspection robot with dual- arm[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Me- chanical Engineering Science, 2023, 237(22):5391-5408.
[20]XIAO Y H, WANG J R, YANG J Q , et al. Dy- namic simulation research of adaptive support mechanism of pipeline inspection robot based on ADAMS[J].Journal of Physics: Conference Se- ries, 2023, 2450(1):1742-6588.
(责任编辑:孙婷)
