电厂热工控制系统应用中的抗干扰技术
2024-05-18徐龙涛
徐龙涛
(上海能源科技发展有限公司,上海)
前言
在我国电力事业发展进程中,以DCS 为基础的电厂热工控制系统应用范围逐步扩展,为电厂现场生产自动化提供了充足支持。但是,现有电厂热工控制系统运行过程中频现干扰问题,不仅影响了系统正常运转,而且对电厂生产作业效率造成了较大冲击。因此,探究抗干扰技术在电厂热工控制系统中的应用具有非常突出的现实意义。
1 电厂热工控制系统结构
电厂热工控制系统结构如图1 所示。

图1 电厂热工控制系统结构
图1 中的电厂热工控制系统DCS 由优化站、主交换机、冗余交换机、Modbus 方式(单主站的主/从通信模式)、OPC 服务器、通信服务器、主控制器、冗余控制器组成,比较运算遵循原有DCS(Distributed Control System,分散控制系统)开放通讯协议、OPC 方式(OLE for Process Control,用于过程控制的工业标准接口),经硬接线提交数据。由图1 可知,电厂热工控制系统为分散控制系统,其采用分层次的积木式结构,控制管理模块由若干操作员站点、工程师站点组成,过程控制则由若干过程控制站点组成,整个系统可分批次、分步骤扩展[1]。
2 电厂热工控制系统应用中的干扰问题
电厂热工控制过程大面积存在模型不确定性、已知不确定性和未知不确定性干扰问题。以锅炉-汽机协调系统为例,作为典型热工控制单元,系统负责稳定相关参数操作,满足电网电力需求。一般在火力发电机组小负荷运行环境下,借助比例-积分- 微分控制可以实现抗干扰运行。但是,在新能源发电比例持续提高进程中,火力发电机组更多承担调峰工作,需机组运行负荷变化幅度进一步提升,机组动态过程表现为大范围非线性,比例-积分- 微分控制无法满足要求[2]。加之锅炉-汽机协调控制系统状态参数严重耦合,内部不明干扰繁多,干扰抑制难度较大。比如,锅炉-汽机协调动态模型多简化构建,模型数据源于海量历史运行数据,模型结构、未建模态、参数摄动等不明干扰叠加出现,不仅冲击系统控制性能,而且引发系统失稳。若直接采用抑制常值干扰的积分控制方法,需要耦合瞬态过程、稳定性与鲁棒性、跟踪过程,致使局部性能被牺牲。如某660MW 燃油汽包炉机组系统扰动状态下的典型工况点如表1 所示。

表1 系统扰动状态下的典型工况点
扰动状态下,660MW 燃油汽包炉机组系统扰为多输入多输出非线性系统,状态变量之间耦合态势明显,汽包内混合流体密度非线性变化促使以往反馈线性设计状态反馈控制实现难度较大。
3 电厂热工控制系统应用中的抗干扰技术方案
3.1 自抗扰技术结构
电厂热工控制系统中,抗干扰技术具有自抗扰性质。自抗扰性质的抗干扰技术结构如图2 所示。

图2 自抗扰性质的抗干扰技术结构
图2 中,TD 跟踪微分器、SEF 状态误差反馈控制器、ESO 非线性扩张状态观测器共同组成抗干扰结构。跟踪微分器是求取自抗扰控制期间微分信号的主体,表现为快速无超调跟踪输入信号,形式如下:
式(1)中,e 为滤波因子;v1为参考输入信号的跟踪信号;v0为设定值;fhan 为综合函数;h 为综合函数的积分步长(跟踪微分器工作积分步长);v2为参考输入信号的微分信号;r0为可调速度参数,对跟踪速度具有决定性影响[3]。
ESO 是自抗扰控制器产生的基础,可在对象模型不明情况下,将其视为含不确定性扰动的积分串联结构,贯彻信号被扩张状态,进而跟踪模型不明部分(含外部不明扰动值)。在跟踪模型不明部分时,实时反馈,实现扰动的实时补偿。根据电厂热工控制系统非线性、大延迟、不确定的特点,可以设定ESO 状态空间形式如下:
式(2)中,x1、x2、xn、xn-1为输入扰动;y 为输出。在扰动不明的情况下,可以将其扩展为新的状态xn,xn的末个状态估计值为原有输出与输出信号跟踪误差的和。基于此,借助ESO,利用常规积分串联形式代替涵盖不明干扰的非线性不确定目标,遵循非线性状态误差反馈控制规律(NLSEF),完成目标控制。
NLSEF 是扩张状态观测器、状态反馈误差控制的实现基础,参数选择与控制器带宽、观测器带宽具有较大联系。因高阶下NLSEF 需反馈控制参数众多,极易输出含高频率噪声微分信号,增加参数整定难度[4]。
3.2 克服可测干扰的技术
可测干扰是电厂热工控制系统常见干扰类型,对于可测干扰,因输入与输出阶次已知,借助降阶模型进行抗干扰控制器设计,极易引发未建模动态,并在有界干扰下出现失稳。此时,可以利用鲁棒自适应前馈控制理论,经正则化处理,利用有界干扰代替全部未建模动态,并利用相对死区技术,辨识试凑死区,确保自适应抗干扰长时间处于有界稳定状态。即设定被控系统输入可测干扰,输出有界不可测扰动,在扰动阶次上界处于较大状态时,利用降低阶次方式。在降低阶次处理时,选取已知参考输入信号,解算系统最优预报方程,获得最优控制解。若输入信号扰动为白噪声,则先求解系统将来时刻的随机干扰,再推到系统当前观测误差。在系统当前观测误差预报时,遵循最优控制律,恰当选择控制输入,取最小指标函数,并进行模型参数辨识数据向量、参数向量定义,形成自适应抗扰控制闭环,消除可测干扰对系统的不利影响。
3.3 克服未知干扰的技术
在电厂热工控制系统运行过程中,未知干扰众多,常规反馈控制无法补偿未知干扰的不利影响。在干扰因客观条件限制无法直接测量情况下,可以从电厂热工控制过程输出着手,构造虚拟干扰估计器,仿真过程输出变化。虚拟干扰控制器由受控过程、受控过程动态模型组成,受控过程动态模型负责受控过程的精确描述,干扰估计量与未测干扰一致。因部分电厂热工控制系统未知干扰含模型失配误差,受控过程动态模型含纯滞后既右半S 平面零点,物理超前控制受限,可以从受控过程动态模型中扣除纯滞后预留部分,以内模控制为基础,进行未测干扰的抗干扰控制,从源头规避干扰不可直接测量对电厂热工控制干扰补偿的影响,新的抗干扰控制技术策略如图3 所示。

图3 克服未知干扰的技术策略
图3 中,1 为设定;2 为推理控制;3 为自校正;4为模型;5 为输出;6 为过程;7 为输出预报器;8 为控制参数;9 为总干扰预报;10 为干扰;11 为输出总预报值;12 为未知干扰预报。
4 电厂热工控制系统应用中的抗干扰实践
4.1 实践过程
以典型电厂热工控制系统-单元机组协调系统为例,系统含多变量,由机炉主控制系统、负荷被控制对象、常规自控制系统组成,具体如图4 所示。
图4 典型电厂热工控制系统结构
图4 中,机炉主控制系统(PLC)是依据机组实际运行情况处理外部负荷指令,依据机炉负荷要求,实现外部负荷指令、实际负荷指令的转化。
4.2 实践结果
4.2.1 输出端阶跃响应
为确定实践结果,设定仿真时间为200 s,将设定值阶跃扰动施加到主汽压力、机组输出功率、中间点焓值上,得出输出端阶跃响应参数如表2 所示。
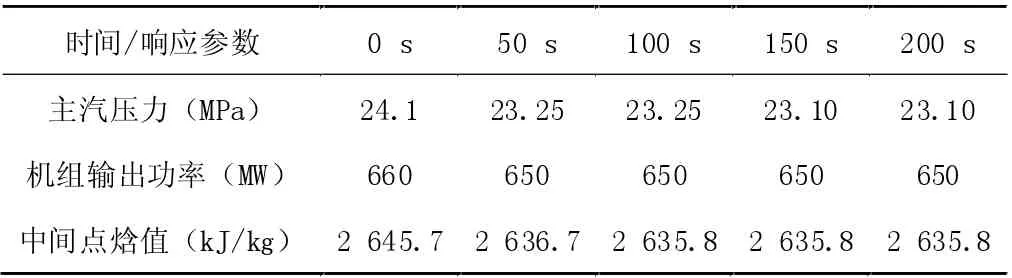
表2 660MW 超临界机组协调抗干扰自控输出端阶跃响应参数
由表2 可知,抗干扰自控技术可以快速跟踪设定值,促使660MW 超临界机组协调控制系统进入稳定状态。同时在某一个通道(主汽压力/机组输出功率/中间点焓值)发生阶跃扰动时,其余2 个通道基本不受干扰,通道之间耦合基本被消除。
4.2.2 负荷下抗扰控制
100%负荷下,在20 s 时,将1 个1 MPa 的正向扰动施加到燃料量上。随后在450 s 时,将1 个同样大小的负向扰动施加到燃料量上,得出燃料量扰动下控制量与主汽压力变化如表3 所示。
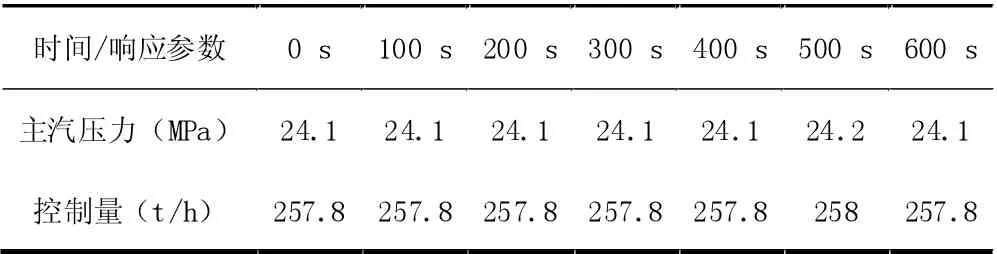
表3 燃料量扰动下控制量与主汽压力变化
由表3 可知,在燃料量存在正向扰动或负向扰动时,借助自抗扰控制器,可以在短时间内促使系统进入稳定状态,并限定变化幅度小于0.5 t/h,主汽压力变化幅度不超出0.1 MPa。表明自抗扰控制器可以在保证电厂热工控制抗扰快速性的同时,降低超调量,改善抗扰性能。
5 结论
综上所述,电厂热工控制系统为分散控制系统,兼具强非线性、大延迟特性,干扰风险较多,且抗干扰控制参数整定难度较大,无法保证抗干扰的稳定性。因此,应立足自抗扰控制器,综合考虑对象模型不确定、参数实时变化、外部扰动频繁等因素,增设相同线性扩张状态观测器,向观测器内引入总扰动估计误差值,有针对性地进行总扰动估计误差补偿,确保电厂热工控制系统抗干扰性能稳定。
