水利工程用液压清淤泵模糊自抗扰控制方法设计
2024-05-17仇志峰
仇志峰
(山东省调水工程运行维护中心,济南 250013)
0 引言
液压传动技术依靠自身操作便捷、功率密度大以及传动稳定等特性被人们广泛应用于机械自动化技术领域中。其中,水利工程用液压清淤泵作为核心系统的主要元件,在工作中起到重要作用,其性能可以关系到液压系统是否能良好运行。但是在工作过程中,液压清淤泵内部经常会出现大型的阶跃负载扰动情况,因此针对液压清淤泵工作过程中的阶跃负载扰动问题,提出有效的模糊自抗扰控制就显得尤为重要[1-2]。
罗俊林等人[3]基于液压机械的高速度特性,提出了一种机械的自抗扰控制算法。该方法首先基于液压机械结构建立液压系统的数学模型,并根据液压系统的转速关系,确定液压机械的前馈控制量,完成自抗扰控制器的设计;最后根据设计的控制器结合液压系统模型实现对液压机械的自抗扰控制。张越杰等人[4]首先对传统自抗扰控制器展开缺陷分析优化设计自抗扰控制器,在系统模型未知的情况下引入不依赖模型信息设计机械的自抗扰控制器,结合伸缩因子确定控制器变论域;最后根据设计的自抗扰控制器实现对液压机械的自抗扰控制。郭栶花等人[5]在变论域的自适应模糊控制时,引入分数阶扩张观测器以及跟踪微分器;首先在机械模糊自抗扰控制中,采用分数跟踪器将输入信号转化成能够平滑跟踪的差分信号,并使用扩张状态观测器获取信号状态估计值,实时获取机械的动态模型以及外部扰动系数;最后基于上述获取参数完成自抗扰控制器的设计,实现机械的模糊自抗扰控制。上述方法在开展液压机械模糊自抗扰控制时,受液压清淤泵液压缸负载力平衡等因素的影响,导致控制效果差。
液压清淤泵[6-7]是水利工程中常用的设备,其是一种利用液压力传动原理进行清淤作业的设备。其基本原理是利用液压泵将液压油送入液压缸,推动活塞运动,从而带动清淤器具进行清淤作业。液压清淤泵的稳定运行对于水利工程的正常运行至关重要。为解决上述液压机械模糊自抗扰控制过程中存在的问题,提出一种水利工程用液压清淤泵模糊自抗扰控制方法。介绍了液压清淤泵自抗扰控制的结构原理和动力学计算方法,并以水利工程用液压清淤泵为例,提出了模糊自抗扰控制方案,并进行了仿真测试。具体来说,在动力学计算方面,分析液压清淤泵的伺服阀和液压缸的动力学特性,确定伺服阀和液压缸的参数,以保证系统的控制效果和稳定性。在模糊自抗扰控制方案中,需要确定负载流量跟踪微分器、液压缸进出口扩张状态观测器和压缸的平衡负载状态误差反馈控制器设计工程,并制定模糊规则,以实现对液压清淤泵的自适应控制。通过仿真测试对液压清淤泵的模糊自抗扰控制方案进行验证,并对结果进行了分析和总结。结果表明,所提出的液压清淤泵模糊自抗扰控制方案可以为水利工程中液压清淤泵的控制提供参考,并有望进一步提高水利工程的效率和安全性。
1 液压清淤泵自抗扰控制结构原理
由于液压清淤泵在工作过程中极易出现阶跃负载扰动情况,从而造成液压清淤泵出现负载扰动故障影响液压清淤泵的安全运行,所以在实施液压清淤泵自抗扰控制前,需要根据液压清淤泵结构模型获取液压清淤泵核心部件结构特点,确定液压清淤泵自抗扰控制过程中相关影响因素。液压清淤泵具体结构如图1所示。
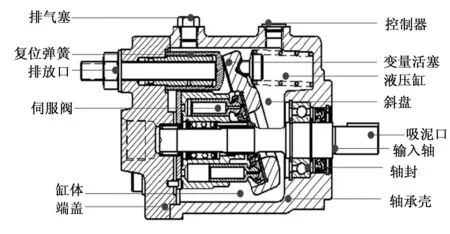
图1 液压清淤泵结构图
分析图1可知,液压清淤泵由排气塞、复位弹簧、控制器、吸泥口、排放口、液压缸、伺服阀以及变量活塞、轴承壳等部件组合构成的。在工作过程中,控制器通过对液压泵和液压缸的控制,实现对清淤器具的运动控制和位置调节。具体来说,液压泵将液压油从油箱中吸入,经过滤芯过滤后,通过伺服阀调节流量和压力,送入液压缸内。液压缸内的活塞受到液压油的推力,向外运动,带动清淤器具进行清淤作业。当液压泵停止工作时,液压缸内的活塞会受到弹簧或重物的作用,返回初始位置。
2 液压清淤泵动力学计算
基于上述液压清淤泵结构可知,液压清淤泵[8]运行过程中液压缸和伺服阀是整个液压清淤泵液压系统的核心。因此在开展液压清淤泵自抗扰控制前,需要针对伺服阀和液压缸开展动力学计算,获取相关动力学方程从而确定液压清淤泵自抗扰控制过程中的影响因素。
2.1 伺服阀动力学计算
由于液压清淤泵工作时,伺服阀的阀芯会根据压力出现位移现象,所以压力能够直接决定液压清淤泵滑阀吸泥口以及排放口的功率性能。因此,设定pd为液压缸的大杆腔体流量,px为小杆腔体流量,以此获取伺服阀在泵体运动时的负载流量,过程如下式所示:
pL=(ipx+pd)/1+i2
(1)
式中,i为液压清淤泵液压缸内部腔体的流量面积比,pL为泵体负载流量[9-10]。基于上述计算结果可知,计算出的泵体负载流量与实际结果之间存在误差,所以需要将伺服阀的负载权值w引入其中,重新计算泵体的负载流量值,结果如下式所示:
(2)
式中,Ad为伺服阀泄露向量,xv为阀芯位移速度,qα为实际负载值,β为腔体流量密度。
设定Bp为伺服阀的流量增益,以此获取伺服阀的线性方程:
(3)
式中,χ为伺服阀的线性方程,Bc为压力增益系数,Δxv为绝对位移速度。由此,确定伺服阀的负载值与压力值之间的动态关系方程,过程如下式所示:
FL=χ(Cd-Cx)
(4)
FL为伺服阀的负载值与压力值之间动态关系方程,Cd与Cx为大、小腔体对应的腔体面积。
2.2 液压缸动力学计算
1)液压缸流入流出动力计算。液压清淤泵中,由于液压缸连接管道存在对称性,因此将液压缸内部电压以及弹性模量设定为常数,液压清淤泵在阶跃负载扰动[11]下液压缸流入、流出的动力与功率相关,其为连续方程,过程如下式所示:
(5)
式中,δ为液压缸流动动力,δlr为液压缸流入动力,δlr为液压缸流出动力,C1为液压缸的吸泥口面积,C2为排放口面积,xq为位移系数,Aiq为内泄漏系数,Aeq为外泄漏系数,Z1为吸泥口容积,Z2为排放口容积,εe为腔体的体积弹性模量,V为液压缸内部电压。
2)液压缸负载力平衡状态计算。液压清淤泵中,液压动力元件[12]功率动态特性与液压清淤泵负载值相关。设定液压清淤泵在阶跃扰动下的负载弹性模量为Eq,粘性摩擦系数为Dq,以此获取液压清淤泵内液压缸输出力与负载力之间的平衡状态值,过程如下式所示:
(6)
式中,nt为液压缸质量,K为液压缸输出力与负载力之间的平衡状态值。
综合上述分析,获取水利工程用液压清淤泵自抗扰控制影响因素集合λ:
λ=FL∪δ∪K
基于上述分析结果可知,在阶跃扰动状态下液压清淤泵开展自抗扰控制过程中,液压清淤泵内部伺服阀负载流量、液压缸进出口状态以及液压缸的平衡负载状态出现波动都会影响后期的自抗扰功率控制结果。综合分析上述指标的复杂性和变化性,有助于提高模糊自抗扰控制的控制精度、适应性和安全性。
3 水利工程用液压清淤泵模糊自抗扰控制
根据上述液压清淤泵运动状态分析结构,借鉴模糊控制原理,对液压清淤泵的非线性误差反馈系数完成在线整定,通过扩张状态观测器对液压清淤泵运行下阶跃负载扰动展开实时观测,结合前馈控制器对阀芯实施控制,从而有效降低液压清淤泵工作时阶跃负载扰动带来的影响,实现水利工程用液压清淤泵模糊自抗扰控制。
3.1 确定模糊自抗扰控制流程
基于上述分析结果可知,水利工程用液压清淤泵模糊自抗扰控制实质上就是液压泵工作过程中遭受转速扰动以及阶跃负载扰动时,通过前馈补偿控制器[13-14]对液压泵变量伺服机构内部斜盘摆角的大小实施补偿控制,从而降低转速扰动以及阶跃负载扰动对液压泵的影响,最终实现液压泵的稳速输出控制。具体控制流程如图2所示。
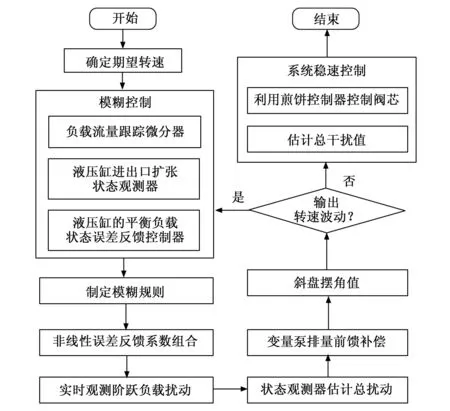
图2 液压清淤泵模糊自抗扰控制流程
基于上述模糊自抗扰控制流程可知,对于液压清淤泵来说,当液压清淤泵处于工作状态时,伺服阀的控缸环节的谐振频率远高于马达控制环节的谐振频率,因此结合水利工程用液压清淤泵自抗扰控制影响因素集合λ,确定液压清淤泵定量马达转速与输入变量之间的传递函数,过程如下式所示:
F(s)=φm(s)/I(λ)
(7)
式中,F(s)为建立的传递函数,φm(s)为液压清淤泵定量马达转速,I(λ)为输入的变量。
3.2 液压清淤泵模糊自抗扰控制
由上文可知,式(7)的输入变量I(λ)与2.2节中得到的负载流量、液压缸进出口状态以及液压缸的平衡负载状态相关,因此,在清淤泵模糊自抗扰控制过程中,分别对3个影响因素进行控制。
1)负载流量跟踪微分器设计:为成功获取液压清淤泵马达负载流量的期望微分信号,降低液压清淤泵超调和响应速度之间的矛盾,需要采用跟踪微分器[15-16]对负载流量控制流程实施安排过渡。
设定u为液压清淤泵负载流量控制量增益,y01为被跟踪信号,ni为期望转速信号,以此获取跟踪微分器最佳控制函数,过程如下式所示:
(8)
式中,fbest为最佳控制函数,a、d为中间变量,sign(a)为符号函数。基于建立的最佳控制函数,将跟踪微分器输入向量设定成o(k),构建二阶的负载流量跟踪微分器,过程如下式所示:
(9)

2)液压缸进出口扩张状态观测器设计:液压清淤泵模糊自抗扰控制时,需要利用扩张状态观测器将液压缸吸水和排水状态过程转换成积分串联类型,完成整个阶跃负载总扰动的估计。
设定误差信号为φ,观测器扩张状态变量设定成y1、y2、y3[17],总扰动记作yz,观测器控制增益设定成[γ1,γ2,γ3,γ4],以此完成扩张状态观测器的建立,过程如下式所示:
(10)
式中,ι为输入信号增益系数[18],η为扩张状态观测器的输入信号。
3)压缸的平衡负载状态误差反馈控制器设计:在开展液压清淤泵模糊自抗扰控制时,为避免液压清淤泵液压缸的平衡负载控制过程出现高频的震颤现象,所以需要设定自抗扰控制过程的连续函数为g(θ,κ,ρ)且接近原点状态,并保证该函数具备线性段的连续幂次函数关系,从而完成液压清淤泵中液压缸的平衡负载状态非线性的误差反馈控制器[19]的设计,结果如下式所示:
(11)
式中,κ为非线性因子,ρ为线段区域长度,Δθ为观测信号的二阶微分差,R为误差反馈控制量,H为设计的误差反馈控制器。
3.3 制定模糊规则
基于上述建立的控制器以及状态观测器,将模糊控制理论与自抗扰控制结合实现模糊控制。即:
I(λ)′=W∪G∪H
(12)
I(λ)′为对负载流量、液压缸进出口状态以及液压缸的平衡负载状态控制之后的结果。
将调整误差为0作为控制目标,根据模糊规则[20-21]对I(λ)′内部加权系数实施整定,从而有效提升液压清淤泵的自抗扰能力。制定的模糊规则μ如下式所示:
(13)
将式(13)的模糊规则总结如表1所示。
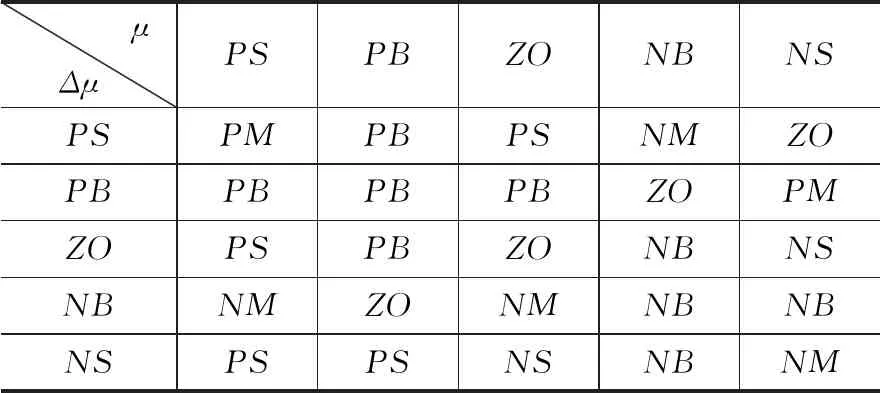
表1 模糊控制规则表
表1中,{高,中,零,低,高}分别记为{PS,PB,ZO,NB,NS}。当μ取值较大时,需要增加量化因子,降低基本论域取值,增强控制强度,有效消除误差,增加比例因子的取值,确保系统的稳定性。当μ偏差取值较小时,系统逐渐接近稳定的状态,此时需要降低量化因子的取值,增加基本论域,减少控制强度,同时减少比例因子以避免超调,适当增加量化因子,确保控制灵敏度和稳态精度。

F(s)′=μ(φm(s)/I(λ)′)
(14)
F(s)′即为进行模糊规则后的传递系数。
将F(s)′按照上述制定的模糊控制原理对液压清淤泵自抗扰控制中的非线性误差反馈系数实施在线整定,通过扩张状态观测器对液压清淤泵运行下阶跃负载扰动展开实时观测,估计液压清淤泵总干扰值,结合前馈控制器对阀芯实施控制。从而实现对液压清淤泵斜盘摆角的补偿,完成液压清淤泵模糊自抗扰控制。
4 仿真测试
分别采用阶跃负载扰动下的水利工程用液压清淤泵模糊自抗扰控制(所提方法)、液压机械无级变速器速比自抗扰控制研究(文献[3]方法)、变论域自适应模糊分数阶自抗扰控制器设计(文献[5]方法)测试。
4.1 仿真设置
4.1.1 液压清淤泵仿真设置
测试过程中,根据AMESim软件与Matlab仿真软件结合,构建虚拟水利工程用液压清淤泵,如图3所示。

图3 水利工程用液压清淤泵虚拟图
具体液压清淤泵内部参数如表2所示。
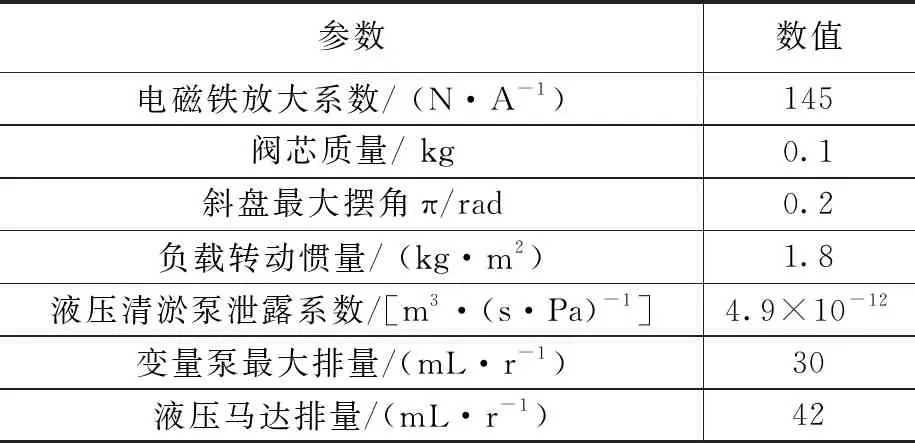
表2 液压清淤泵内部参数
4.1.2 控制器参数设置
结合前文的理论研究可知,本文设计的水利工程用液压清淤泵模糊自抗扰控制方法包括负载流量跟踪微分器、液压缸进出口扩张状态观测器、压缸的平衡负载状态误差反馈控制器3方面,结合液压清淤泵运行实际,3个控制器的参数设置如表3所示。
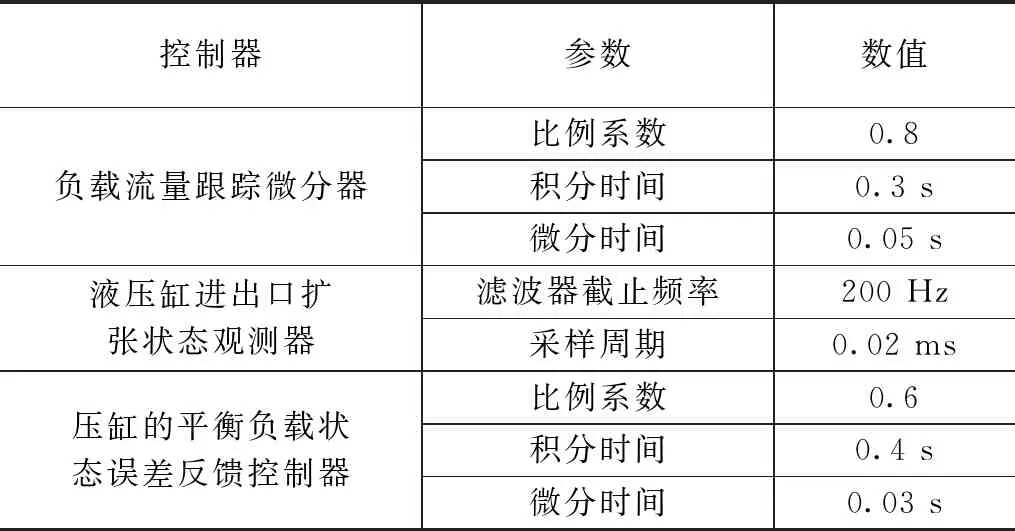
表3 控制器参数设置
4.2 仿真流程
根据上述参数设定,确定液压清淤泵模糊自抗扰控制仿真流程如下:
1)设备准备:按照4.1部分准备液压清淤泵、控制器等设备,并进行安装和调试,确保设备运行稳定。
2)系统建模和参数识别:对液压清淤泵进行建模,并进行参数识别,确定系统的数学模型和控制参数。
(1)确定液压清淤泵的结构:根据图1确定液压清淤泵的结构包括液压泵、液压缸、阀门等组成部分。
对于多筒型基础(如图9所示),天津大学等研究发现下沉调平时筒体之间的相互约束以及调平后筒裙周围土体与筒体之间的边界条件变化(如图中调平后筒土间裂缝、土压力分布等)同时影响着下沉安全和可调深度及角度。更大功率风电风机需求的大尺度筒型基础,直径和筒壁厚度之比势必增加。薄壁结构和克服下沉阻力需要的吸力组合必将增加结构变形甚至屈曲的施工风险。
(2)建立液压清淤泵模拟图:根据液压清淤泵的结构和运动规律,利用AMESim软件与Matlab仿真软件生成图2所示的水利工程用液压清淤泵虚拟图。
(3)参数识别:确定如表1所示的液压清淤泵电磁铁放大系数、阀芯质量、斜盘最大摆角、负载转动惯量、液压清淤泵泄露系数、变量泵最大排量、液压马达排量参数。
(4)确定控制器参数:根据建立的液压清淤泵模拟图和参数识别结果,确定如表3所示的模糊自抗扰控制器的控制参数。
3)确定控制策略:根据所提方法、文献[3]方法以及文献[5]方法实现过程确定控制策略。
4)数据采集:通过传感器对液压泵的状态进行实时监测和数据采集,包括负载扰动、电压、含淤值、吸水量等参数。
5)结果分析:根据步骤4)获取的数据,对结果进行分析和评估。
4.3 仿真结果及分析
基于上述建立的虚拟液压清淤泵,利用所提方法、文献[3]方法以及文献[5]方法开展模糊自抗扰控制,从负载扰动值估计结果、液压清淤泵响应速度、液压清淤泵清淤效果、液压清淤泵容积效率、液压清淤泵运行稳定性和作业任务控制次数6个方面测试不同方法在液压清淤泵模糊自抗扰控制过程中的实际控制效果。
1)负载扰动值估计测试:负载扰动值是指在液压清淤泵运行过程中,由于负载的变化或外部扰动等原因所产生的负载扰动信号的大小。液压清淤泵的负载扰动值是影响控制精度和稳定性的重要因素之一,因此,采用所提方法、文献[3]方法以及文献[5]方法开展模糊自抗扰控制后,对不同方法在自抗扰控制时估计的总扰动值展开测试,测试结果如图4所示。
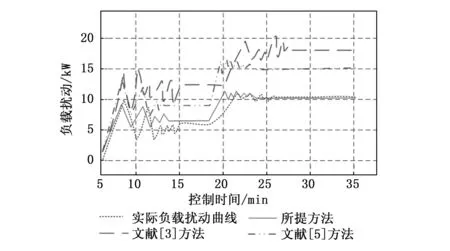
图4 不同方法负载扰动估计测试结果
2)液压清淤泵响应速度对比:液压清淤泵的响应速度是指在电压输入变化时,液压清淤泵输出流量或压力等参数的变化速度。响应速度是衡量液压清淤泵性能的重要指标之一。当液压清淤泵通过电能运行,所以,液压清淤泵工作时,电压会有显著波动。因此通过分析液压清淤泵的电压变化可以直观看出液压清淤泵的响应速度,分别对所提方法、文献[3]方法、文献[4]方法下液压清淤泵的电压幅值进行记录,结果如图5所示。
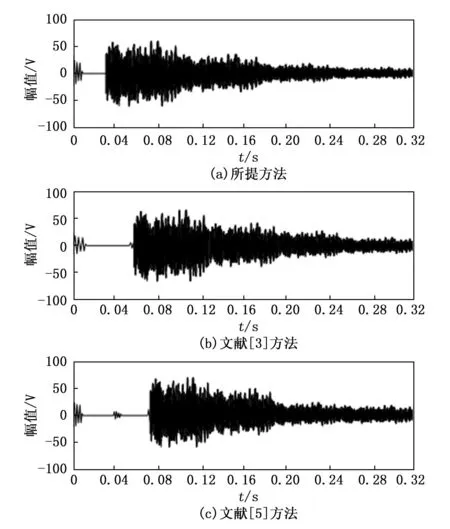
图5 不同方法液压清淤泵的电压变化
通过图5可知,运用所提方法,液压清淤泵在0.03 s时开始响应,且幅值波动幅度较小,在0.18 s时幅值波动趋于稳定;文献[3]方法在0.05 s时开始响应,在0.25 s时幅值波动趋于稳定;文献[5]方法在0.07 s开始响应,0.20 s时幅值波动趋于稳定。表明所提方法液压清淤泵的响应速度较快。
3)液压清淤泵清淤效果:液压清淤泵常用于清除河道、湖泊等水域中的淤泥和杂草。液压清淤泵的清淤效果可以通过测量含淤值来评估。含淤值是指单位面积内淤泥的体积或重量。液压清淤泵的清淤效果可以通过测量清淤前后的含淤值变化来评估,含淤值量越小,说明清淤效果越好。采用所提方法、文献[3]方法以及文献[5]方法开展模糊自抗扰控制后,对不同方法控制后的液压清淤泵清淤效果展开测试,测试结果如表4所示。
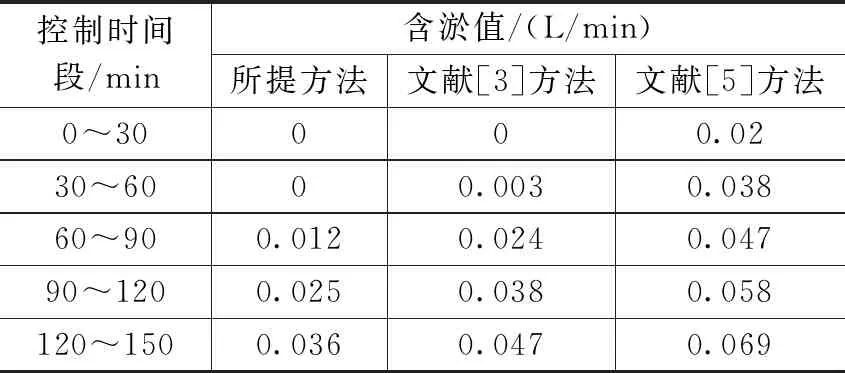
表4 不同方法的清淤效果测试结果
分析表4可知,在开展液压清淤泵模糊自抗扰控制时,随着控制时间的不断增加,不同方法测试出的液压清淤泵含淤值逐渐增加。60~90 min之间,所提方法的含淤量为0.012 L/min;文献[3]方法的含淤量为0.024 L/min;文献[5]方法的含淤量为0.047 L/min。其中,所提方法测试出的液压清淤泵含淤量较少,可以有效提高清淤效果。
4)液压清淤泵容积效率测试:液压清淤泵容积效率是指液压清淤泵输出流量与泵排量之比,通常以百分比表示。容积效率是衡量液压泵工作效率和稳定性等性能的重要指标之一,为此,采用所提方法、文献[3]方法以及文献[5]方法开展模糊自抗扰控制后,对不同方法的液压清淤泵容积效率展开测试,测试结果如图6所示。
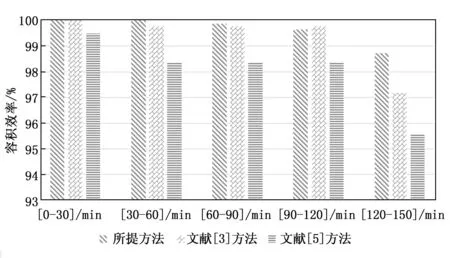
图6 不同方法液压清淤泵容积效率测试结果
分析图6可知,在运行液压清淤泵模糊自抗扰控制时,随着控制时间的不断增加,在不同的时间段中,3种方法测试出的液压清淤泵容积效率各不相同。初始时,所提方法和文献[3]方法均保持100%容积效率,文献[5]方法容积效率开始降低为99.5%;随着时间继续增加,3种方法的液压清淤泵容积效率均有下降;时间持续到120~150 min时,所提方法容积效率最高为98.73%,因此所提方法的液压清淤泵容积效率较优。
5)液压清淤泵运行稳定性测试:液压清淤泵的运行稳定性是指在工作过程中,液压清淤泵输出流量和压力等参数的稳定性。液压清淤泵的稳定性对于水利工程的正常运行至关重要,特别是在吸水量较大的情况下,需要保证液压泵的稳定性和可靠性。液压清淤泵运行稳定时,吸水量随着时间的增长稳定上升;运行不稳定时,会出现过量吸水或者吸水异常现象。因此,通过分析液压清淤泵的吸水量变化来判断清淤泵在不同方法下的运行情况,如图7所示。
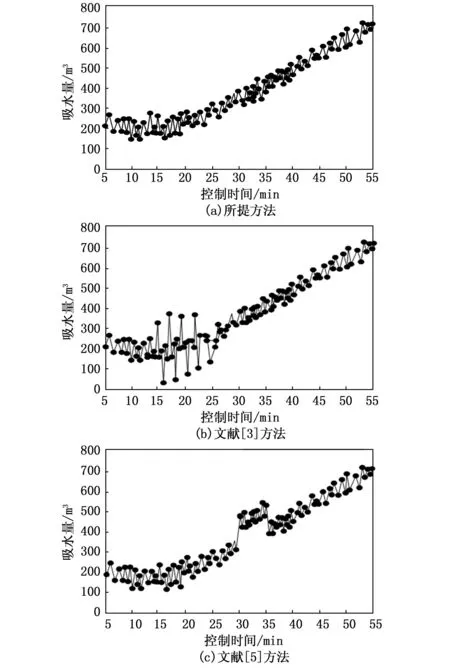
图7 不同方法下液压清淤泵的运行稳定性
分析图7可知,运用所提方法液压清淤泵的吸水量随着时间的增加而增加,且增加幅度较为稳定;在文献[3]方法下,清淤泵的吸水量变化幅度较大;在文献[5]方法下,清淤泵的吸水量有吸水异常现象。表明运用所提方法对液压清淤泵进行控制,运行较为稳定。
6)作业任务控制次数测试:液压清淤泵的作业任务控制次数是指在清淤作业中,控制器对液压泵和液压缸的控制次数。控制次数越少,表明液压清淤泵运行更稳定。表5为3种方法对清淤作业任务的控制次数结果。
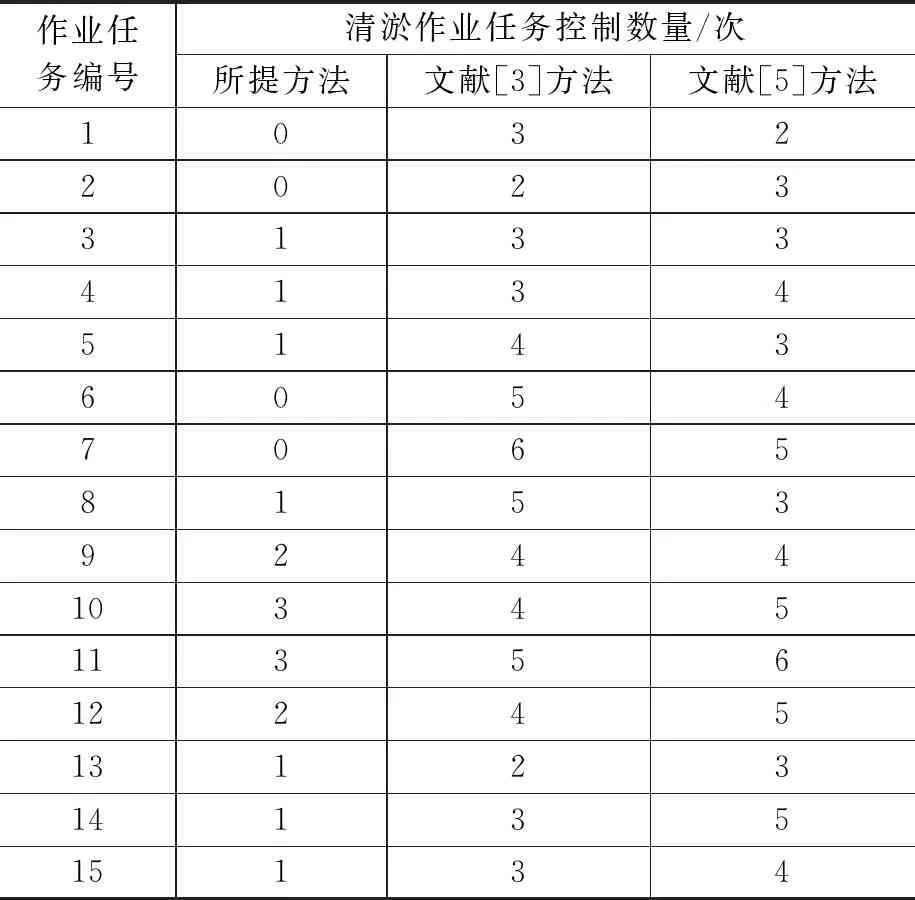
表5 3种方法对清淤作业任务的控制次数
分析表5可知,运用所提方法对清淤作业任务的控制次数少于文献[3]方法和文献[5]方法,最大控制次数为3次。文献[3]方法对清淤作业任务的控制次数在任务7时达到最大,为6次,文献[5]方法对清淤作业任务的控制次数在任务11时达到最大,为6次;综上可知,所提方法通过选择合适的控制器,以适应不同的清淤场景和淤泥性质的同时,分析了液压清淤泵的负载和扰动,并采取相应的控制策略进行补偿和抑制,减少了控制次数,保证了液压清淤泵的稳定运行。
通过以上6组测试可知,所提方法完成水利工程用液压清淤泵模糊自抗扰控制时,该控制方法能够精准地测试出综合负载扰动值,且控制效果较好。
5 结束语
随着液压清淤泵适用范围的不断增加,对水利工程用液压清淤泵实施模糊自抗扰控制就显得尤为重要。为此,提出阶跃负载扰动下的水利工程用液压清淤泵模糊自抗扰控制。该方法基于自抗扰控制时相关影响因素分析结果,确定自抗扰控制流程,并设计与之相应的观测器、补偿控制器,从而实现对液压清淤泵的自抗扰控制。并通过建立虚拟液压清淤泵,从负载扰动值估计结果、液压清淤泵含淤量效果以及液压清淤泵容积效率等5个方面测试不同方法在液压清淤泵模糊自抗扰控制过程中的实际控制效果。对比证明所提方法能够精准地测试出综合负载扰动值,且控制效果较好,为该方向的研究提供一定的理论价值。
