强电磁干扰环境中的水利泵站漏电保护器服役状态智能预测方法
2024-05-15买小虎
买小虎
(甘肃水务节水科技发展有限责任公司,甘肃 兰州 730000)
水利泵站的漏电保护器是重要的安全设备,能够在泵站线路发生漏电事故时,快速切断电源,保障泵站设备与人员的安全。通过预测保护器的服役状态,能够在保护器正常运行的状态下,检测出电路中的漏电情况,从而实现泵站的安全运行。为此,研究人员设计了多种预测方法。其中,基于马尔可夫过程的水利泵站漏电保护器服役状态智能预测方法,以及基于样本熵重构与RF-LSTM模型的水利泵站漏电保护器服役状态智能预测方法的应用较为广泛。
基于马尔可夫过程的水利泵站漏电保护器服役状态智能预测方法,主要是利用马尔可夫过程建立状态转移模型,准确描述保护器服役状态,从而实现状态智能预测[1]。基于样本熵重构与RF-LSTM模型的水利泵站漏电保护器服役状态智能预测方法,主要是利用SER-RF-LSTM建立混合预测模型,得到服役状态的重构特征分量,从而实现保护器状态的准确预测[2]。以上两种方法均存在一定的弊端,影响最终的预测效果[3]。因此,本文在强电磁干扰的环境下,设计了水利泵站漏电保护器服役状态智能预测方法。
1 基于强电磁干扰的漏电保护器服役状态预测方法设计
1.1 建立水利泵站漏电保护器服役状态预测空间
在水利泵站正常运行时,受到泵站运行情况影响,漏电保护器的服役状态存在转移的情况[4]。随着漏电保护器役龄的增加,保护器将出现拒动、误动、自检等状态,将上述状态进行预测,从而满足保护器的运行需求。本文建立服役状态预测空间,见图1。

图1 漏电保护器服役状态空间示意图
图1中,μp为保护器修复状态;μj为保护器维护状态;μ1为故障修复状态;λj为拒动状态;J为检修状态。漏电保护器处于不同状态,泵站工作状态也不同。
状态1时,水利泵站正常工作,漏电保护器正确不工作。
状态2时,水利泵站线路退出,保护器处于检修状态,分别为紧急检修、计划性检修,满足检修周期的保护服役状态获得重置[5]。
状态3时,泵站线路正常工作,保护器不可自检,拒动失效。
状态4、6时,泵站正常,保护器无法拒动,服役状态失效。
状态5、9、10时,泵站相关故障被隔离,保护器预测为误动状态。
状态7时,泵站设备发生故障,保护器预测为拒动状态。
状态8时,泵站设备发生故障,保护器预测为正常动作状态[6]。
状态11时,泵站设备故障得到修复,保护器动作正常。
状态12、13时,泵站设备隔离后,保护器动作正常。在智能预测的过程中,漏电保护器处于何种服役状态,均会在状态空间中显示出来。根据状态空间得到的服役状态情况,避免预测失误的问题。
1.2 基于强电磁干扰环境预测漏电保护器服役状态时域
服役状态时域信号能够反映保护器的物理状态,从而确保状态预测结果的准确性[7]。从漏电保护器服役状态信号的时域与频域信号中,获取保护器各元件之间的互连关系,从而确保服役状态预测的准确性。假设强磁干扰为δ,则信号带宽B可表示为
B=δ/Tr
(1)
式(1)中,Tr为时域波形上升时间。Tr越短,B越大,δ越大。在此条件下,预测服役状态的时域序列,公式如下:
(2)
式(2)中,y(Tr)为服役状态的时域序列;αi为自回归系数;i为第i个服役状态值;p为回归阶数。根据y(Tr),智能分析漏电保护器拒动作与误动作的概率(见表1)。

表1 漏电保护器拒动作与误动作的概率
表1显示,在智能预测的过程中,漏电保护器动作电流不大于30mA,工作时间不大于0.1s,预测为正常动作状态;动作电流大于30mA,工作时间大于0.1s,预测为异常动作状态,越限报警,确保水利泵站的安全运行。将灵敏度、精准度作为智能预测方法的指标,灵敏度计算公式如下:
(3)
式(3)中,Se为智能预测方法的灵敏度指标;TP为保护器处于状态1,被正确预测为状态1的数量;P为实际为状态1的数量。预测精度计算公式如下:
(4)
式(4)中,Ac为服役状态智能预测的精度;TN为保护器处于状态1,但被错误地预测为状态2的数量;Al为总样本数。Se越高,预测效果越佳。Ac越高,预测效果越佳。
2 实验分析
为了验证本文设计的方法是否满足水利泵站漏电保护器服役状态智能预测需求,本文对上述方法进行了实验分析。最终的实验结果则以文献[1]基于马尔可夫过程的水利泵站漏电保护器服役状态智能预测方法、文献[2]基于样本熵重构与RF-LSTM模型的水利泵站漏电保护器服役状态智能预测方法,以及本文设计的基于强电磁干扰环境的水利泵站漏电保护器服役状态智能预测方法进行对比的形式呈现。具体的实验准备过程以及最终的实验结果介绍如下。
2.1 实验过程
本次实验以水利泵站的真实数据为主,确保预测结果的真实有效性。将漏电保护器的服役状态分为正常与异常两种,根据动作状态预测服役状态(见图2)。
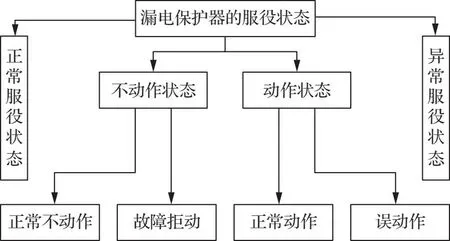
图2 漏电保护器服役状态智能分析框图
如图2所示,本次实验根据服役状态智能分析情况,设定相关指标,确定最终的预测结果是否准确。其中,Se表示智能预测的灵敏度,用于敏感地预测漏电保护器状态变化,并及时发出预警、故障信号;Ac表示智能预测的精准度,用于准确地预测出保护器的服役状态,避免正常工作状态与故障状态混淆的情况;V表示智能预测的可解释性,表示智能预测方法能够提供的可解释的预测结果,根据漏电保护器内部工作机制与输出结果评估预测值,进一步确保预测准确性,V越高,预测效果越佳;T表示状态预测的实时性,T越小,预测效果越佳。
2.2 实验结果
在上述实验条件下,本文随机选取出低、中、高三种强度的电磁干扰,并将运行数据采集周期设定为1h、2h、3h,能够满足本次实验需求。在其他条件均已知的情况下,将文献[1]基于马尔可夫过程的水利泵站漏电保护器服役状态智能预测方法的性能指标、文献[2]基于样本熵重构与RF-LSTM模型的水利泵站漏电保护器服役状态智能预测方法的性能指标,以及本文设计的基于强电磁干扰环境的水利泵站漏电保护器服役状态智能预测方法的性能指标进行对比(见表2)。

表2 电磁干扰强度实验结果
表2显示,采用文献[1]基于马尔可夫过程的水利泵站漏电保护器服役状态智能预测方法,在电磁干扰强度从低到高的过程中,Se、Ac均有一定程度的下降,T有一定程度的上升,只有V保持稳定。由此可见,该方法在可解释性方面具有优势,但是整体预测水平较低,不利于漏电保护器的正常运行。
采用文献[2]基于样本熵重构与RF-LSTM模型的水利泵站漏电保护器服役状态智能预测方法,在电磁干扰强度同样从低到高的过程中,Se、Ac、V的值较之文献[1]预测方法有所提升,T的值较文献[1]预测方法有所下降,由此可见,该方法的预测性能优于文献[1]方法,但仍存在随电磁干扰的变化而变化的情况,亟须对其进一步优化。而采用本文设计的基于强电磁干扰环境的水利泵站漏电保护器服役状态智能预测方法,在电磁干扰强度从低到高的过程中,Se、Ac、V、T的值均处于较为稳定的状态,Se、Ac、V相对较高,T相对较低。由此可见,本文设计的方法具有较高的预测水平,能够满足漏电保护器服役状态预测需求。
3 结 语
受到电磁干扰环境的影响,水利泵站的安全运行面临着重大挑战。本文设计了在强电磁干扰环境下,水利泵站漏电保护器服役状态智能预测方法。从预测空间、时域预测两个方面,对漏电保护器的运行数据进行智能分析,实现了真正意义上的服役状态的准确预测。