水下基床整平测量系统的研发与应用
2024-05-11张海成陈龙海
张海成,陈龙海
(中交四航局第二工程有限公司 广州 510230)
0 引言
目前,在进行深水基床整平作业时,使用整平船和深水整平机共同进行作业。在进行水下作业时,需要对整平船和整平机进行测量定位,传统的测量定位方法是采用水上人工观测和潜水员水下人工作业相结合进行整平船和整平机的测量定位调整,但是由于受风浪因素影响大,作业天数减少,安全生产受到威胁;同时,由于人工水下作业,受到水深压力的限制,人工作业困难,潜水整平有效作业时间短,作业效率低,且劳动强度大,不能有效进行精确测量定位,费时费力。在此形势下,机械化施工替代人力施工已是大势所趋[1]。
1 工程概况
香港某海堤码头及防波堤项目工程,具体施工内容为沉箱海堤、沉箱码头、方块海堤以及沉箱防波堤,其中所有区段的抛石基床均采用Grade200石料,基床顶标高范围为-11.0~6.5 m,基床两侧坡比范围为1∶1.25~1∶2,基床海侧坡面结构采用土工布、块石垫层、扭王字块护面。项目海域三面无遮挡,在每年的下半年期间极易经受强烈的西南风和台风的侵袭,风浪条件恶劣。项目安全环保要求高,关于施工区域潜水作业、水质保护和附近居民的噪音保护管理执行非常严格,加之为DCM 基础,基床整平作业窗口缩短和潜水作业风险较大。
2 水下整平机测量定位系统的组成及原理
水下整平机测量定位系统由3个独立的测量系统组成:船体双GPS 定位系统、整平架测量系统、滚轮标高测量系统。船体双GPS 定位系统主要作用为工作母船抛锚定位提供精确位置坐标;整平架测量系统主要作用为整平架提供定位、调平信息;滚筒标高测量系统主要是对平后标高进行实时测量,并收集工作标高数据,为施工控制和验收提供依据[2]。
整平架测量系统主要由安装在整平机矩形封闭框架4 个角上的测量塔组成,每个测量塔上顶部安装有GPS,是整个测量系统的关键主体(见图1)。在测量塔顶部布置1 根3 m 固定套管(内径200 mm,壁厚20 mm)和15 m 滑动杆(外径197 mm,壁厚20 mm)。在整平架移出船舷边,通过伸缩机构将滑杆提升12 m,使得测量滑杆顶部的GPS 处于箱梁上部,避免箱梁对GPS 的遮蔽和干扰。测量滑杆通过1 t 小型电动葫芦(2倍卷绕)提升,伸缩杆停止时,由设在测量塔固定外套管顶部的抱闸式刹车自动抱紧装置将伸缩杆抱紧,防止伸缩杆下滑及由于内外套管间隙引起的晃动。测量滑杆提升系统设置限位装置,当测量滑杆提升到上限位时,小型电动葫芦自动停止刹车,抱紧装置锁紧测量滑杆(见图2)。在布料管后侧安装一套滚轮系统,并在顶部安装5 号GPS(见图3)。布料管纵横移时,滚轮随着布料管行走,并在滚动的时候随着整平后的碎石面高低作上下浮动,顶部5 号GPS 跟随滚轮一起浮动,实时测量和记录工后碎石层顶标高和位置数据,并在测量系统软件中以不同颜色展示不同标高;此外,可在整平结束后导出成果数据作为基床整平验收的依据。

图1 整平测量塔Fig.1 Measuring Tower

图2 测量塔构造Fig.2 Structural of Measurement Tower(mm)

图3 滚轮标高测量系统及工作示意图Fig.3 Roller Elevation Measurement System and Working Diagram
司机室放置GPS 1、GPS 2、GPS 3、GPS 4、GPS 5主机,通过台式计算机微处理单元将整平机三维姿态显示在定位软件界面,并在驾驶室内分屏显示;驾驶室内放置GPS 6、GPS 7 主机,通过计算机微处理单元将工作母船三维姿态显示在定位软件界面(见图4)。应用项目自主研发的“应广三维可视化定位系统”专业软件在计算机上可实现对整平机施工位置定位,实时收集整平机的三维位置数据。此外,还安装了姿态仪,通过软件分析,可在计算机上直观看到整平机的姿态信息,从而实现水下整平机测量精确定位[3]。

图4 测量系统平面布置Fig.4 Measurement System Layout Plan
3 水下整平机测量定位系统的应用
3.1 水下整平机测量定位
本项目采用大型平板驳作为工作母船,改装行架天车以满足整平机的起吊上下水及定位,天车吊装一台整机重量约为83 t 的水下高精度液压整平机和喂料,整平机入水后,操作起重机使整平机缓慢下沉,整平定位分为粗定位和精定位。在整平机缓慢下沉到整平机指定位置的过程为粗定位,在粗定位时,根据待整平基床的位置、驳船的位置、起重机的跨距[4],将GPS 定位信息传输到计算机中,通过“应广三维可视化定位系统”界面可直观地指导驳船和天车粗定位,使用挂在整平机钢丝绳上的尼龙绳进行辅助控制,使整平机平稳落在需要整平的基床上[4]。整平机着地后,根据定位系统显示的位置信息初步判断整平机的位置与待整平的位置是否一致,如果不一致,需将整平机轻微吊起进行调整,直至满足要求,完成整平机粗定位。粗定位完成后,对整平机进行精定位,根据预先导入定位系统的基床整平设计底图(CAD 格式文件),显示出整平架的设计位置与实际位置的差值和调整方向,指导操作手精确调整机位(见图5)。
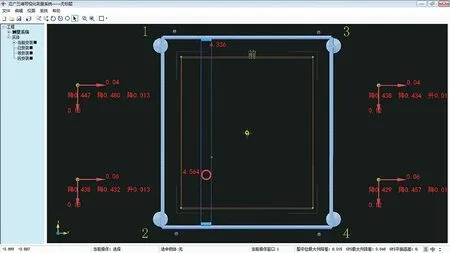
图5 整平架可视化定位界面Fig.5 Main Interface of Measurement and Positioning System
测量过程控制主要通过船舶定位系统与整平架定位系统来实现,船舶定位过程中,工程人员通过可视化软件界面可实时观察船舶在施工水域的实际位置[5]。
3.2 水下整平测量数据采集
基床抛石夯实完成后,整平前使用多波束测深仪扫海采集基床高程数据确定需要整平的基床厚度,并将待整平的基床位置高程数据导入“应广三维可视化定位系统”,从而得到夯实后基床块石面的实测地形,系统以不同颜色表示不同的高程范围(见图6)。

图6 整平前实测地形Fig.6 Topographic before Leveling the Foundation Bed
获取实测地形后,根据不同颜色的方格(高程范围),制定该施工位置的具体整平方案:如果发现块石面高程有超限的方格,超低则进行补料,超高则先不喂料,降低布料管对该方格进行粗刮平。粗刮平后开始布料管喂料,对地形略低的方格,布料管刮平速度则放慢一些,地形略高的方格布料管刮平速度则快一些。
基床整平后通过布料管侧方的滚轮高程测量系统进行整平后高程数据采集,滚轮滚过整平后的基床时,滚轮会随着地形上下浮动,浮动将带动顶部的GPS 同时上下浮动,通过GPS 测量基床实时的高程,并经数据线输送至司机室计算机中“应广三维可视化系统”中,通过软件的可视化处理,形成整平后的地形图。一个整平位置完成后,可从软件中调出整平前后的基床面高程对比图,不同颜色代表不同高程范围,直观显示该位置整平后是否满足设计要求,同时可导出具体的高程数据作为验收依据(见图7)。

图7 整平前后高程对比Fig.7 Comparison of Elevation before and after Leveling
3.3 传统测量方法与水下整平机测量定位系统的数据对比
以传统测量方法做基准复核,水下整平机测量定位系统作为实验数据研究,通过试验应用获得大量的测量数据,现采取2020 年10 月4 日试验区域4 区里程CH0+140-155 基床顶面(试验现场风速3~5 m/s,浪高小于0.5 m,海况较好)的应用数据进行分析:早上08:30 整平试验开始,于10:47 完成试验前准备工作,历时137 min;10:47~11:22,历时35 min,布料管空走试机、GPS 测量系统调试及拉绳测距检查。试机结果显示整平机横向整平长度w=13.97 m,纵向整平长度L=16.55 m,整平面积S=wL=231 m2;传统测量方法采用工程人员在甲板上扶尺及潜水员水下辅助立标杆方式进行,测量员在岸上架设全站仪观测(见图8),获取基床面相应于水下整平机定位系统测点位置的高程(见表1)[6]。

表1 传统测量方法与水下整平机测量定位系统采集高程数据汇总Tab.1 Summary of Elevation Data Collected by Traditional Measurement Methods and Underwater Leveling Machine Measurement Positioning System

图8 传统人工测量方法Fig.8 Traditional Manual Measurement Methods
试验效果:本次实际整平面积约为216 m2,试验整平功效为14.48 m2/h(正常施工可达510 m2/d),采用多波束测深仪测得基床表面高程平整度整体满足技术要求限差±25 mm,但存在部分凹陷部位,局部位置高差达50 mm 左右,试验基床顶面高程平整度较好;与传统测量方法采集的高程数据对比,差值普遍在20 mm以内,最大高差为23 mm,满足设计限差技术要求,说明水下整平机测量定位系统采集的高程数据准确可靠。试验总用时14 h 3 min,整平定位全过程系统运行正常,相比传统手持GPS 进行定位的方法,船舶测量定位系统效率比其高出3 倍以上,且全程机械化、可视化指导施工,视觉更直观,操作更灵活[7]。
4 整平对比分析
对比分析传统潜水整平工艺如表2所示。

表2 对比分析Tab.2 Comparative Analysis
整平机测量定位系统对比传统潜水整平具有以下优点:
4.1 安全生产
离岸深水重力式水工结构施工,由于受风浪因素影响较大,作业天数减少,安全生产受到威胁。随着作业水深加大,潜水作业所需减压时间增长,潜水员若减压不充分,将会严重损害健康,甚至带来生命威胁,水深越大,这种危险因素越大,严重影响安全生产[8]。
整平机测量定位系统实现了全自动化的控制,所有的操作和控制均在母船控制室,不需要潜水员水下作业配合,并且整平船抗风浪、水流的能力很强,因此,采用整平机测量定位系统进行整平工作安全性很高,且降低人员投入成本[9]。
4.2 环境保护
整平机测量定位系统可清晰了解抛石基床地形情况,多刮少填,精准定位布料管将石料下放至基床面,减少了水面抛石带来的泥污等现象,施工时不易发生污染海域环境情况,对施工水域周围的生态环境影响小。
4.3 施工效率高
由于深水整平船具有较强的抗风浪能力,每个月水上可作业天数大为提高。而且水下基床整平测量系统实现了可视化指导施工,使得施工目标更清晰、减少无用功,每天完成工程量比人工潜水整平效率提高较多,很大程度降低劳动强度和不安全因素的影响,并节约成本[10]。
5 结论
随着经济的快速发展,海港工程建设开始逐步向深水水域发展,而深水海港工程的施工多处于外海无掩护水域,自然条件恶劣,可施工窗口期短,传统的人工测量配合潜水员水下作业方式已无法满足施工要求,并且潜水作业人工成本急剧增长,在此形势下,机械化施工替代人力施工已是大势所趋。水下液压式整平机测量系统的发明和应用,克服了传统人工整平的缺点,实现了经济、高效、安全的目标。整平机测量系统整合施工机械及测量设备为一体,实现可视化、智能化及信息化施工,测量系统建造和维护成本较低、施工效率高、最高单日可定位指导施工整平面积达510 m2,整平质量效果较好,整平误差可控制在±5 cm内,不受作业水深影响,在精度效率、成本、环保、安全性上优势显著,可为类似深水码头基床整平施工提供经验借鉴。
