变压器滤油泄漏实时监控报警装置的设计与应用
2024-05-07黄映炎罗未希潘洪磊
黄映炎 石 姣 罗未希 潘洪磊 陈 婷
(贵州送变电有限责任公司,贵州 贵阳 550000)
变压器是电力系统中的重要设备,其可以保障电力系统安全、稳定地运行,保证供电质量[1]。变压器滤油器的泄漏问题是导致变压器故障的重要原因之一,因此实时监控变压器滤油泄漏情况,对于保障变压器安全、稳定地运行具有重要意义。
1 变压器滤油泄漏实时监控报警装置硬件设计
1.1 管道流量监控
管道流量监控是该装置的重要组成部分,通过监测管道的流量情况,可以实时了解变压器滤油泄漏情况并及时进行报警[2]。为了监控管道流量,本设计采用变频器的开环恒压频比(VVVF)方式变频开环恒压频比调速,该方式结构简单,可以对电机进行无极调速,并有一定的节能效果。通过PLC完成复杂计算,变频器执行输出,流量控制结构如图1所示。选择齿轮油泵,型号为YCB10-0.6,出口压力为0.6MPa,出口流量为15m3/h;电机型号为Y132S-4,电机功率为5.5kW。通过采用上述管道流量监控方案,可以对变压器滤油泄漏情况进行实时监控和报警,保证变压器正常运行。同时,该方案结构简单、节能效果明显,具有一定的实用价值。
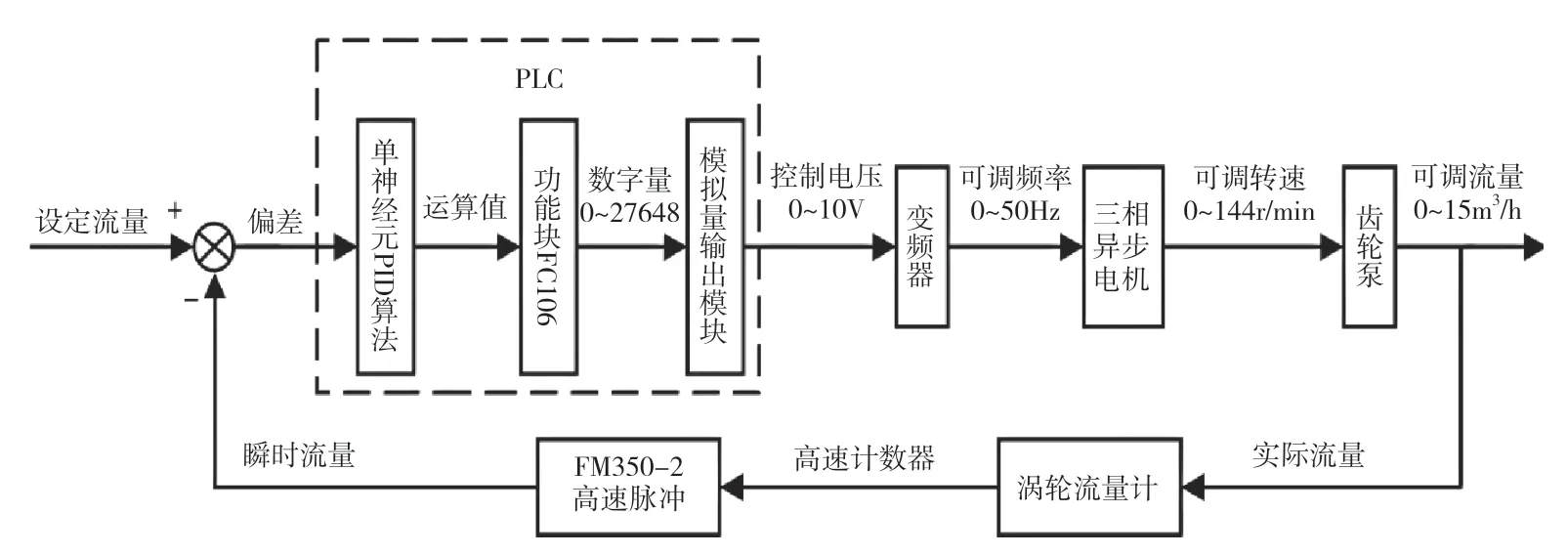
图1 流量控制结构图
1.2 实时监控报警装置总体设计
如图2所示,主站通过Profibus与从站分布式I/O控制器进行通信,对各关键点的数据进行采集和控制[3]。这种通信方式具有高效、稳定的特点,能够实时获取变压器滤油泄漏等关键数据,并将其传输到上位机监控界面进行处理。上位机监控界面采用直观的图形界面,能够清晰地显示变压器滤油泄漏的情况。操作人员可以通过监控界面直观地了解变压器滤油泄漏的程度和位置。当监测到异常情况时,上位机能够及时发出报警信号,提醒操作人员采取相应的措施。这种实时监测和报警系统能够保障变压器安全运行,及时处理潜在的故障风险,提高变压器的可靠性和稳定性。该系统使用西门子的PLC控制器和Profibus分布式I/O控制系统,具有稳定性高、可靠性强的特点,能够满足实时监控和报警的要求。
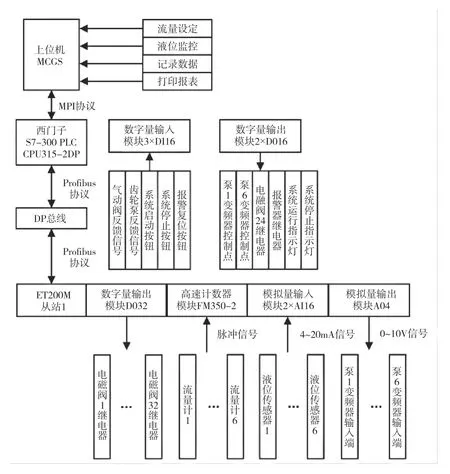
图2 控制系统总体结构图
1.3 瞬时流量监测
涡轮流量计的脉冲输出信号被送入FM350-2高速计数器模块,通过程序计算可以得到瞬时流量的数值[4]。FM350-2模块具有高精度和多通道的特点,能够满足对流量的精确计量要求。同时,该模块还具有多种计数方法和工作方式,可以根据实际需求进行调整和配置,提高了系统的灵活性和可扩展性。
瞬时流量计算过程如公式(1)所示。
式中:F为瞬时流量;f为脉冲频率;λ为仪表系数;时间窗口选择1s。为了实现交替发送作业号来读取测量值的功能,可以在程序中安排一个时钟存储器位M100.0。通过对该位进行周期性的置位和复位操作,可以使作业号在读取过程中交替为100和101,从而读取不同通道测量值。
2 单神经元计算
2.1 单神经元学习规则
单神经元学习规则是指神经元在接收输入信号后,通过调整连接权重来学习和适应输入模式的过程。在单神经元学习规则中,最常用的是希伯来规则和Delta规则[5]。
希伯来规则(Hebbian Rule):由Donald Hebb提出,它描述了神经元之间连接权重的调整方式。希伯来规则认为,当一个神经元的输入与输出同时活跃时,它们之间的连接权重应该增强。如果输入信号与输出信号同时为正值或同时为负值,则连接权重增加;如果一个为正一个为负,则连接权重减少。希伯来规则可以用公式(2)表示。
式中:Δw为连接权重的变化量;η为学习率;x为输入信号;y为输出信号。
Delta规则(Delta Rule):由Widrow和Hoff提出,在感知机学习和人工神经网络中广泛应用。Delta规则通过最小化输出与期望输出之间的误差来调整连接权重,其通过计算误差的梯度来更新权重,使误差变小。Delta规则可以用公式(3)表示。
式中:d为期望输出。
Delta规则单神经元学习神经元从输入数据中自动学习并形成内部表示。这种学习方式不需要任何标签或指导,神经元通过自我组织和自适应的方式发现数据中的模式和结构。Delta规则的一个常见应用是聚类,即将相似的数据点分组在一起。相比下,有监督的希伯来单神经元学习需要标记的数据集作为指导。在这种学习方式中,神经元根据输入和相应的标签进行训练。通过比较神经元的输出和正确的标签,可以调整神经元的权重和偏置,以提高准确性。有监督学习的一个常见应用是分类,即将输入数据分为不同的类别。
2.2 有监督的希伯来单神经元PID
有监督的希伯来学习规则的单神经元PID控制原理如图3所示。
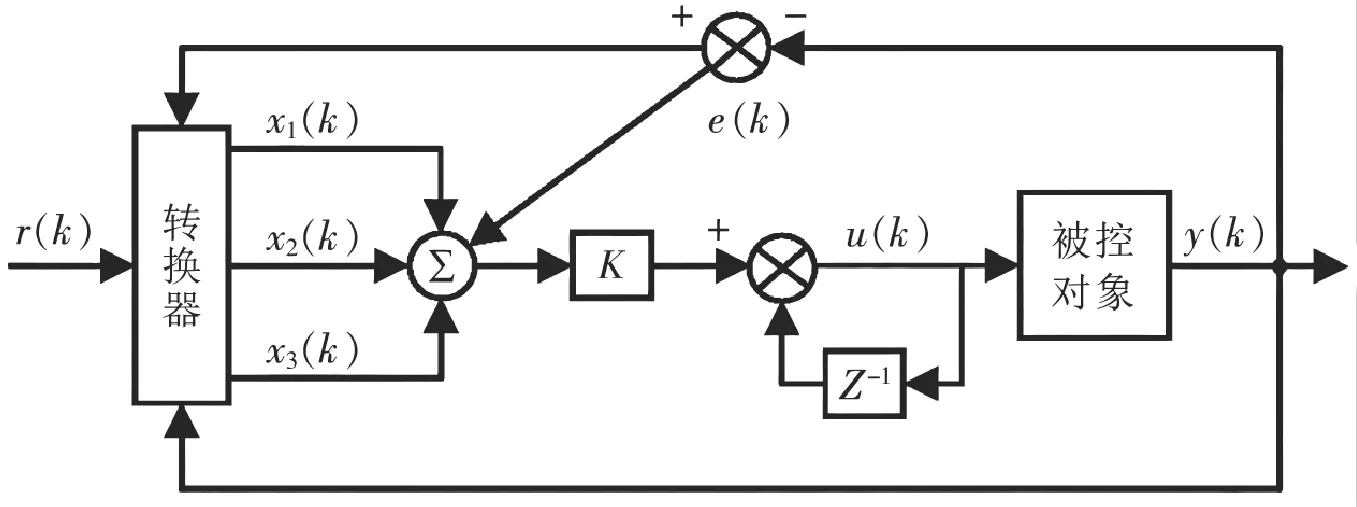
图3 有监督的希伯来单神经元PID结构图
x1(k)=e(k)=r(k)-y(k)
x2(k)=e(k)-e(k-1)
x3(k)=e(k)-2e(k-1)+e(k-2)
式中:e(k)为当前时刻的误差(教师信号);r(k)为期望输出;y(k)为实际输出;k为当前时刻。另外,根据题目要求,学习速率分为比例、积分和微分3个部分,分别记为ηP、ηI和ηD。假设神经元的比例系数为K(K>0),那么根据PID控制器的原理可以得到公式(4)~公式(6)。
神经元的输出如公式(7)所示。
3 仿真结果
3.1 单神经元PID仿真
在本次单神经元PID控制器的仿真试验中,随机选取初始权值ω1=ω2=ω3=0.1,选取的学习效率包括比例项学习效率ηP=0.4、积分项学习效率ηI=0.35以及微分项学习效率ηD=0.4。同时,选取神经元的比例系数K=0.05,并采用1ms的采样时间来进行仿真试验。在仿真试验的过程中,在0.5s加入一个单位阶跃信号作为干扰源,以测试神经元PID控制器对于干扰的鲁棒性和控制精度。根据PID控制器的原理可以得到神经元PID控制器的输出公式,如公式(8)所示。
式中:x1(k)为当前时刻的误差;x2(k)为误差的变化量;x3(k)为误差的变化率。
在仿真试验的过程中,将神经元PID控制器的输出值与期望输出进行比较,计算误差e(k)=r(k)-y(k)。根据误差大小,调整神经元的连接权重,以实现对期望输出的控制,最终结果如图4所示。
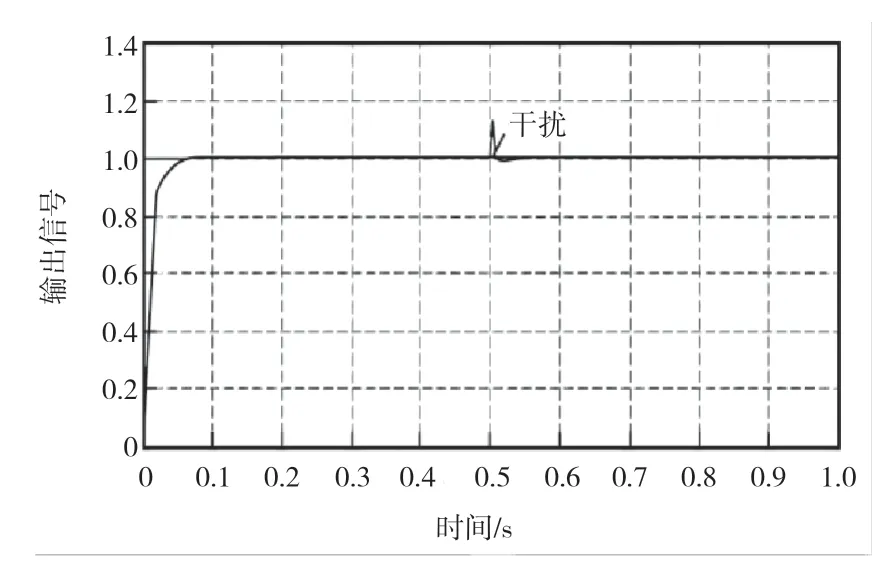
图4 有监督希伯来算法干扰曲线
与普通PID算法相比,有监督Hebb单神经元PID算法在系统响应速度、无超调和抑制干扰能力方面具有更优越的特点。它通过监督学习方式动态调整参数,从而提高系统响应速度。与普通PID算法相比,有监督Hebb单神经元PID算法能够避免超调问题的发生,保持系统的稳定性。此外,该算法还具有更好的抑制干扰能力,能够减少外界干扰对系统控制的影响,提高控制系统的精度。
3.2 PLC中实现单神经元PID控制算法
在调整PID控制器的参数的过程中,需要逐步调整K值,实现最佳控制效果。一般来说,可以先给出K值、ηI和ηP的值,然后再逐步调整参数,以达到最优的控制效果。由于初始权值ωi和学习效率ηP、ηI和ηD的值对系统的影响并不大。因此在实际应用中,可以先给出K、ηI和ηP的值,然后通过调整K值来优化控制效果。当系统的超调量较小时,可以再适当调整ηD的值,以进一步提高控制效果。在实际应用中,K值通常需要根据具体的控制对象和控制要求进行适当调整。如图5所示,在本次试验中,经过多次试验和调整,最终确定K值为2.6,ηP和ηI的值均为2,ηD的值为0.8。通过这些参数的调整,有效控制管道流量,为后续的研究提供参考。
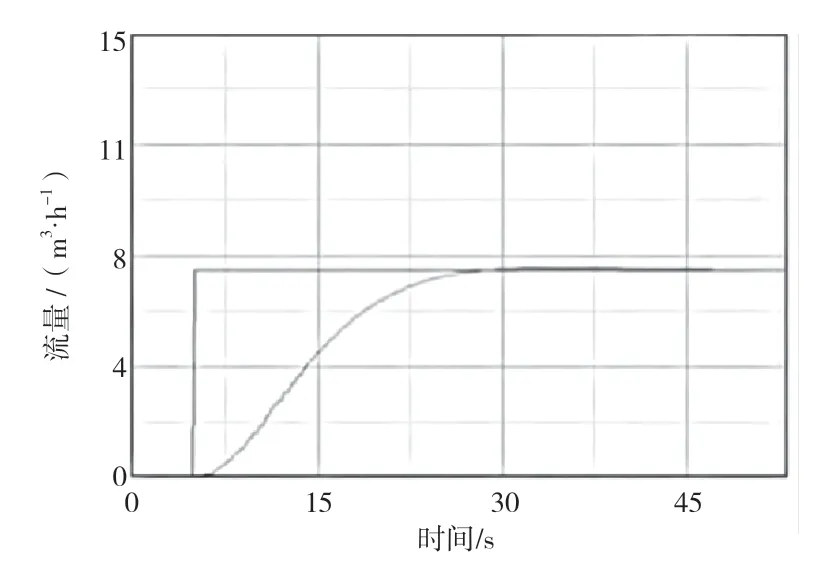
图5 流量调节界面
4 结语
本文设计的基于PLC和单神经元PID算法的变压器滤油泄漏实时监控报警装置,具有实时性强、准确性高和可靠性高等优点,能够有效地监测变压器滤油泄漏情况,保障变压器安全、稳定地运行。未来将继续研究和改进该装置,以提高其在实际应用中的可操作性和适用性,为电力系统的安全、稳定运行做出更大贡献。
