面向水下目标探测的海洋机器人追踪控制策略
2024-05-07耿成园冯强强张会寅赵振强吴泽彬
耿成园 冯强强 张会寅 赵振强 吴泽彬
(中国地质调查局广州海洋地质调查局,广东 广州 511458)
自主水下机器人(Autonomous Underwater Vehicle,AUV)具有较高的智能化水平,能够利用自身集成化的功能模组进行自主运动控制以及智能化决策,其中导航系统是水下机器人的重要组成部分,通过融合多传感器的硬件精准探测水下目标。本文针对多传感器的水下机器人的追踪控制系统进行设计,并对系统性能进行模拟分析。
1 水下机器人追踪控制系统设计
追踪控制系统主要由2个可独立操控的模组构成,第一模组为履带式行进机器人,并配置动力驱动装置,能够在水中进行上下移动以及水平面平移;第二模组为水下操纵检测装置,进行实时参数最优化控制,2个模组都可以在水面上方通过操作人员直接进行操作控制。由于2个模组是由模块化的功能单元进行封装,因此其可以根据需求参数自定义配置功能,并可以同履带式机人共同进行耦合操作。所有机器人模组共同连接至控制面板中,通过控制面板来提供图像流集成,集成全过程信息参数。
2 水下机器人追踪控制系统的设计
2.1 水下机器人追踪控制系统的框架
2.2 传感器采集模块设计
传感器的数据参数采集是实现机器人运动以及姿态调整的重要控制依据,为了更好地适应水下的运行环境并提升采集效率,在参数配置上,使用传感器对机器运行姿态、室外温度、密封舱温度以及实时GPS数据进行采集[2]。传感器采集模块功能如图1所示。
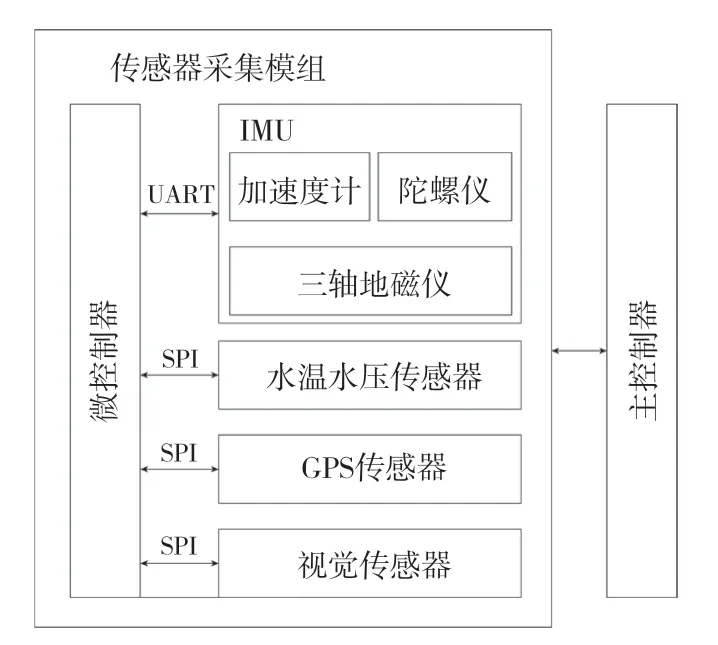
图1 传感器采集模块功能示意图
2.3 主控制器设计
水下机器人系统有5个模块,包括微控制单元、直流电机(无刷)、电压测试和通信装置等。主要控制MCU为STM32F4芯片,其核心为ARM Cortex-M4,峰值频率为168 MHz,在通信传输的过程中,支持UATR、SPI等多种数据输出端口,同时配置外部定时装置以及模拟数字转换器(Analogtodigital converter,ADC)等。主MCU通过可编程逻辑控制器(Programmable Logic Controller,PLC)来实时获取外部参照命令,稳定传输运动状态的信息,其主控制器模块功能如图2所示。
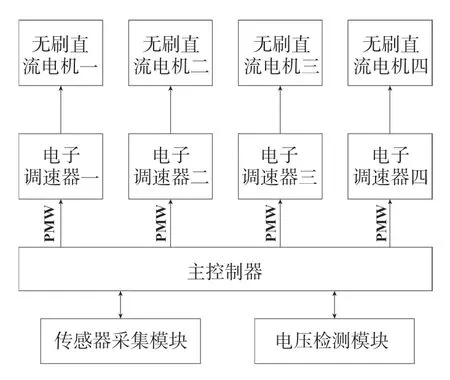
图2 主控制器模块功能示意图
3 模型建立与描述
水下机器人在海洋环境中的运行规律十分复杂,因此需要将机器人的整体运动分为垂直运动和水平运动2个方向,以便进行研究[3]。本文基于机器人的水平和垂直运动需求来建立三维坐标系。在水平面的运行中,受到惯性作用以及控制饱和度的影响,实际的系统输出参数τc往往达不到理论的控制要求,因此τ的具体表达原理如公式(1)所示。
式中:为能够输出的最大输出量;为能够输出的最小输出量。但是水下环境较为复杂,其动力参数的变化往往是无序的,这会对机器人的实际控制效果产生影响,因此需要重点降低控制器的鲁棒性。其原理的变化形式如公式(2)所示。
式中:M为系统整体的惯性矩阵;ΔM为机器人在惯性矩阵变化的过程中产生的误差,ΔM∈R3×3;v为v的导数;C(v)为向心力矩阵;ΔC为机器人在向心力矩阵中产生的误差,ΔC∈R3×3;v为横向方向的偏移速度;ΔD为机器人在前进动力时所产生的误差,ΔD∈R3×3。D(v,v)为阻尼矩阵;G(P) 为恢复力矩阵;τ为自由度矩阵;f为参数设计中的自由度干扰项。
4 追踪控制策略与实现步骤
4.1 追踪控制策略
追踪控制的前提是对水下结构及其周边的障碍物进行全面扫描,为了更精确地记录障碍物的尺寸,需要实时识别设备到表面的距离以及机器人的实际运行状态,使机器人能够在垂直方向上移动。其移动的激光光点实时展示在相机的传感器中,4束激光围绕着相机构建a×b的矩形。控制光束直接平行于光轴并且以对称的形式按照矩形矩阵进行排列,而为了保证控制策略的精确度,同时引入冗余的第四激光束作为异常点的检测光束,进而保证控制的稳定性和有效性。
4.2 实现步骤
4.2.1 基阵结构
追踪控制需要准确评估目标的方位角和仰角,在追踪识别中,十字阵具有阵列冗余度小的特点[4],因此采用十字阵作为接收基阵。在每个器阵中,间距为半个波长。
纸浆洗涤过程,其操作优化的核心思想是:在不增加额外生产设备和不改变现有工艺流程的前提下,优化纸浆洗涤质量,提高洗后出浆量,降低洗涤水用量;以提高综合经济效益为目标,通过实时监测纸浆洗涤过程的状态信息,当条件参数和状态参数发生改变时,对关键操作参数进行及时、合理的调节,从而使整个纸浆洗涤过程处在优化的运行状态。
4.2.2 信号接收
需要对每个换能器采集的数据进行数模转换,其采样率控制在20 kHz~50 kHz,还要约束增益控制,并以基于A/D数据转换的形式读取数据[5]。本文采用RISC 微处理器(Advanced RISC Machine,ARM)处理数据,读取后的数据直接存入端口数据库中。
4.2.3 信号处理
在接收信号后,需要迅速处理信号。其主要针对数字滤波、FFT以及距离估计进行模型识别,在这个过程中,波束运算量最大,因此在保证计算精度的基础上,其运算量会显著增加[6]。
4.2.4 主动测距
完成信号处理后,还需要通过脉冲法测量脉冲被目标反射后的时间周期,进而判断距离。在测距过程中,通过估计方位判断准确方向,进而沿着计算方向发出射声脉冲,主动测量距离。
4.2.5 结果显示与输出
测距计算结果通过显示装置进行可视化展示,还需要建立对应的数据输出端口,可以采用RS232或485传输端口数据。
5 仿真试验与结果分析
5.1 测距定位误差源分析
本文通过MATLAB软件求解水下机器人的追踪控制策略,并使用软件中自带的优化工具解算测定距离。为了提升距离测定的计算精度,需要分析影响测距结果的误差要素,本文以国家《海道测量规范》中的参数要求作为测量要求。在模拟测量的过程中,海水分层会对求解的平均速度产生误差影响,由于速度主要是由压力引起的,因此可以加大深海中的分层层级。平均声速水层分割参数见表1。
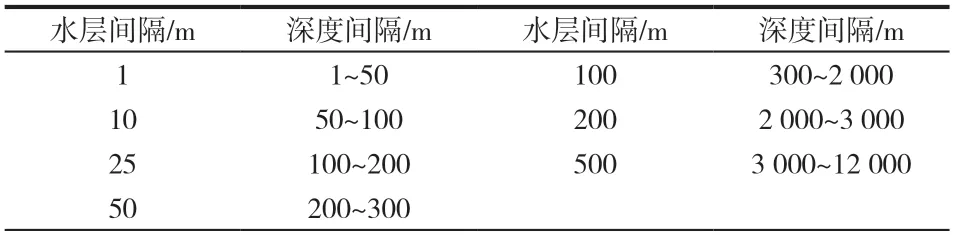
表1 平均声速水层分割参数表
在初始模型设定中,纵向的初始速度为1 m/s,横向的初始速度为0.02 m/s,朝向角度为任意设置,纵向的速度偏差为±0.015 m/s,横向的速度偏差为±0.005 m/s,速度噪声类型为白噪声,其参数分布符合高斯分布。
5.2 测距定位误差源分析
采用“平均声速法”求解声学距离,假设测距误差为2‰,当设备下潜至水下5 000 m时,其测距误差为10 m,下潜后导航仿真误差值分布如图3所示。在定深运动的过程中,其初始艏向角为30°,总航程为860.32 m,最大导航误差为25.41 m。整个过程的运动仿真符合闭合式矩形运动航位算法的误差分布要求。
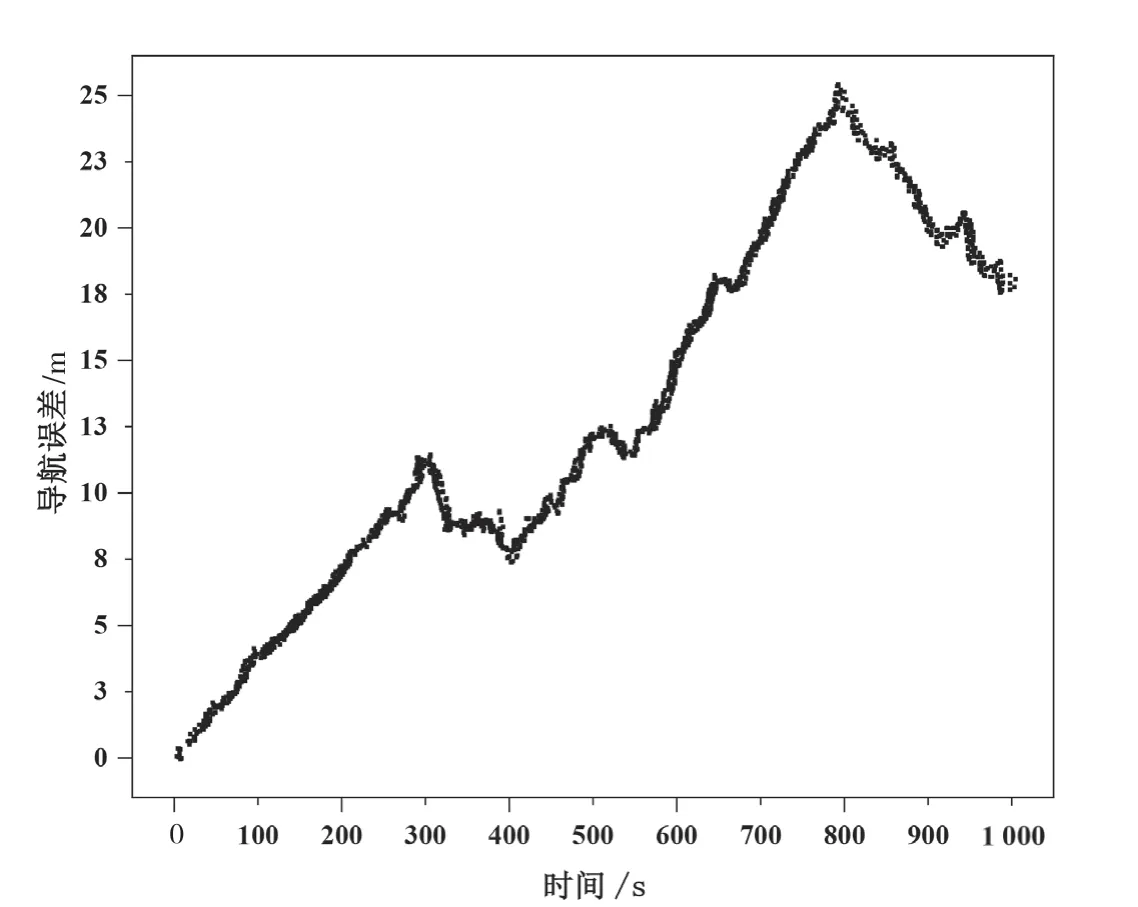
图3 导航误差仿真结果
5.3 入射角度水平误差值分析
不同入射角度的水平误差分析也是判断机器人稳定性的关键性参数,其中声速初始值设为1 200 m /s,水深为5 000 m,在不同初设入射角度下,声线折射引起的水平误差偏移分布如图4所示。
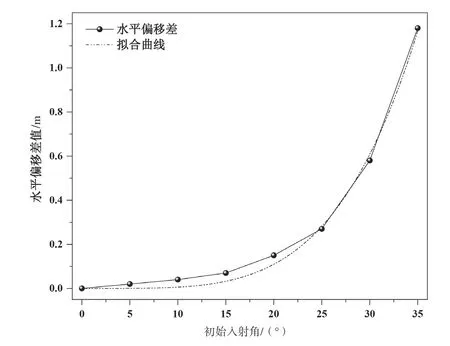
图4 不同入射角度的水平误差偏移分布值
从图4能够看出,随着初始角度数值不断增大,其水平偏移量也逐渐增加。在进行水下模拟试验的过程中,多数采用“闭合路径”运动方式并且其入射角与水平偏移量之间存在显著的曲线关系。通过自身的对称性来降低导航的误差,进而提升导航的精度。其中AUV的直线航程距离为836.92 m,最大程度降低了导航误差,稳定控制AUV。
6 结论
本文结合水下环境的要求,提出了一种AUV的模块化功能实现方法,并在MATLAB软件中搭建了仿真模型。结果表明,通过融合多传感器的硬件导航精准识别水下目标,其追踪控制策略保证机器人稳定运行,根据参数化仿真实现了机器人的自主运动控制和智能化决策。