电气自动化系统中状态监测与故障诊断的实现方法研究
2024-05-07黄毅文
罗 毅 黄毅文
(赣州金环磁选科技装备股份有限公司,江西 赣州 341000)
随着工业技术的不断发展,电气自动化系统在各领域中的应用越来越广泛。然而,随着系统复杂性提升,设备异常运行的情况日益突出。因此,监测电气自动化系统的状态并及时诊断故障成为亟待解决的问题[1]。本文结合煤矿电气设备自动化系统状态监控[2-3]、异常运行状态辨识[4]与故障诊断方法[5]的实例,探讨了在电气自动化系统中状态监测与故障诊断的实现方法。
1 系统概述
1.1 井下现场监控层
井下现场监控层是预警监控平台体系中的第一层,由分布式子站、主配设备系统和传感器组成。
设i为不同的传感器,PLC下位机传感器采集的温度数据为Ti,压力数据为Pi,电流数据为Ii。当这些数据通过CAN总线传输至井上中心分站时,数学模型如图1所示。
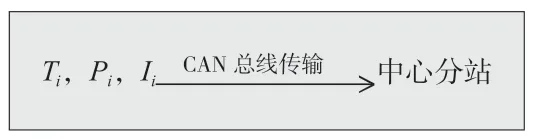
图1 井下现场监控层数学模型
在传输过程中,考虑可能的干扰和误差,使用数字信号处理方法,例如滤波算法,如公式(1)所示。
式中:Xi为输入变量;Yi为输出变量;Xi(n-k)构成基于序号n的原始数据录入;n为时间序列中的当前位置;Yi(n)为经滤波后的数据,为指定数据的相应输出结果;k为元素所在的特定索引位置;H(k)为滤波器的冲激响应;N为滤波器的长度。
分布式子站能够有效执行中心分站中上位机和远程集控中心发来的命令信息,完成对井下设备的远程监控作业。设传感器采集的数据为Di,经过PLC处理后得到的结果为Ri。在处理阶段,可以使用数学模型进行数据补偿和校正。例如,校正温度传感器的数据,可以使用线性插值,如公式(2)所示。
式中:ai和bi为插值系数,通过事先标定和校准得到。
1.2 井上矿井监控层
井上矿井监控层是预警监控平台体系中的第二层,主要由中心分站组成。井上中心分站中的工控计算机通过CAN总线与各分布式子站中的PLC进行通信。设各分布式子站中传感器采集到的数据为Sij,其中j为不同子站。井下现场监控层数据传输如图2所示。
图2 井下现场监控层数据传输
在数据传输过程中,考虑可能的通信噪声和干扰,可以使用差分信号传输模型,如公式(3)所示。
式中:Vij(t)为传感器数据的差分信号;Pij为实际传感器信号;Nij(t)为噪声。对差分信号进行解调和滤波,可以提高数据传输的可靠性。
1.3 远程矿区监控层
远程矿区监控层是预警监控平台体系中的第三层,主要由矿区外集团集控中心总站的大型工业计算机组成。
在远程矿区监控层中采用光纤传输技术接收来自井下分布式子站和井上中心分站上传的数据。设井下分布式子站和井上中心分站的综合监测数据为Mij。光纤传输过程用矩阵表示,如公式(4)所示。
在数据传输过程中,引入矩阵运算,将传感器数据矩阵M与传输矩阵T相乘,得到传输后的数据矩阵,如公式(5)所示。
式中:T为描述光纤传输特性的矩阵。这个数学模型能够更准确地描述数据在传输过程中的变化。
2 矿山设备的状态监测与故障诊断
2.1 数据采集与传输
数据采集是实时监测设备运行状态的关键环节,因此需要选择性能高、可靠性强的装置。同时,考虑不同设备的结构和运行特点,需要设计多种不同的数据采集方式,以满足不同设备的监测需求。
与此同时,通过应用网络化进行远程监控和诊断。可以将监测数据和诊断结果通过企业内部的网络传输至服务器端,以便管理和查询。同时还可以将结果发布至动态Web主页中,通过接入外部故障诊断系统和专业人员以及数据云端化等方式支持用户访问和数据导出。
2.2 监测数据特征提取
提取采集的数据特征,可以有效地识别设备的状态和故障类型。根据特征提取结果,系统通过建立数学模型或使用机器学习算法来识别和分析故障模式。本文分析系统数据使用的各类预测模型包括BP神经网络、粒子群算法(PSO)、长短期记忆网络(LSTM)和门控循环单元(GRU)。
BP神经网络是一种多层前馈神经网络,包括输入层、隐藏层和输出层。其通过反向传播算法来调整网络权重W和偏置项b,最小化损失函数L。在训练过程中,梯度下降法用于优化神经网络的预测结果,如公式(6)所示。
前向传播
式中:H为中间层。输入层输入中间层,然后进入输出层,加入系数影响构成神经系统;Y为神经网络输出的预测值;X为输入数据;σ为激活函数以引进非线性特征;Win和Wout分别为输入层到隐藏层、隐藏层到输出层的权重矩阵;bin和bout分别为输入层到隐藏层、隐藏层到输出层的偏置项。
当训练神经网络时,需要计算损失函数来衡量模型预测值与真实标签之间的差异。通过比较差异,可以评估模型在当前参数下的表现,并利用该信息来调整参数以减少损失函数,使模型更好地拟合训练数据。因此,当训练神经网络时,前向传播需要计算损失函数来评估模型性能,并为反向传播提供梯度信息以更新参数。损失计算过程如公式(7)所示。
式中:L为loss损失函数;Yture为真实标签。
反向传播算法用于计算损失函数对网络参数的梯度,进而更新网络参数以最小化损失函数。PSO是一种群体智能算法,通过模拟鸟群觅食行为来搜索问题的最优解。每个个体(粒子)的位置为解空间中的1个解,速度为在解空间中搜索的方向和速率。更新其速度如公式(8)所示。
式中:为粒子i更新后速度;为更新前速度;为粒子i的个体最佳位置;为指定粒子瞬时位置;c1、c2为学习因子;r1、r2为随机数。
更新其位置,如公式(9)所示。
首先,扩展平时成绩的考核范围,涵盖作业及出勤、课堂讲评互动、章节测验及任务型考核等4种。作业及出勤作为基本考核内容,因为按时到课听讲,独立认真完成作业仍然是学生掌握知识的重要环节,也是学习态度是否端正的主要表现。因此,该项考核有其重要性,约占平时成绩的40%;课堂讲评考核约占20%,该项成绩主要是体现学生在课堂上参与教学互动的积极性及效果,例如分组学习时是否积极参与讲课和评课,课堂提问及回答问题情况等,都能反映学生学习状况;章节测验考核占20%;任务型考核主要指学生在课后对知识的巩固、应用及延伸扩展,比如就专题讲座的内容写综述小论文,登录网络课程平台听指定章节的课程等等,该项考核也占20%。
式中:为粒子i在维度j上的位置;为更新后粒子i在维度j上的位置;为更新后的指定粒子瞬时速度。
LSTM是一种特殊的循环神经网络(RNN),通过引入记忆单元来解决传统RNN存在的梯度消失问题。LSTM包括输入门、遗忘门和输出门等关键部分。
3 各子系统的状态监测与故障诊断
3.1 井下通风机
井下通风机配备了多种传感器和监测系统,其中包括设备内部的传感器、监测系统以及依托通风系统的外部传感器。设备内部的传感器实时监测通风机的运行参数,例如风量Q、风压P、温度T和振动等[6],如公式(10)所示。
式中:Qinternal为内部风量;Pinternal为内部风压;Tinternal为内部温度;V为振动参数。同时,外部传感器监测空气中的有害气体浓度(例如CO、CO2和CH4)、温度T以及湿度H的变化,如公式(11)所示。
式中:g为整体函数;Concentrationharmful,gas为瓦斯有害浓度水平;Concentrationexternal为外部气体浓度;Texternal为外部温度;Hexternal为外部湿度。
根据这些传感器采集的数据,形成通风机的状态向量Sfan,包括内部和外部监测参数[7],如公式(12)所示。
假设有一个故障指示向量Ffan,其中每个元素都表示通风机可能的故障类型,例如轴承磨损、叶片损坏等。监测数据与故障指示向量之间的关系如公式(13)所示。
式中:h为一个构建监测数据与故障之间映射关系的分类机函数;h(Sfan)为对现有高维数据降维成为单一故障指示的分类机函数,根据监测数据Sfan判断可能的故障类型。
式中 :Diagnosisbearing为面向轴承的诊断定位;k(V)为抢修路径;k为一个构建故障与排除方法之间映射关系的推理机函数;根据振动参数V判断轴承磨损的程度和位置,将低维故障向量结合设备参数进一步匹配至相应的诊断结果。根据具体诊断结果,系统可以给出维修建议和预防措施。
分析监测数据,可以及时发现通风机存在的故障和异常情况。例如,当监测到风量不足或风压异常时,通风机的机械部件可能会出现故障,例如轴承磨损或叶片损坏等。维修人员可以根据系统提供的信息有针对性地进行维修,保证通风机正常运转。通风机子系统模型预测结果对比如图3所示。
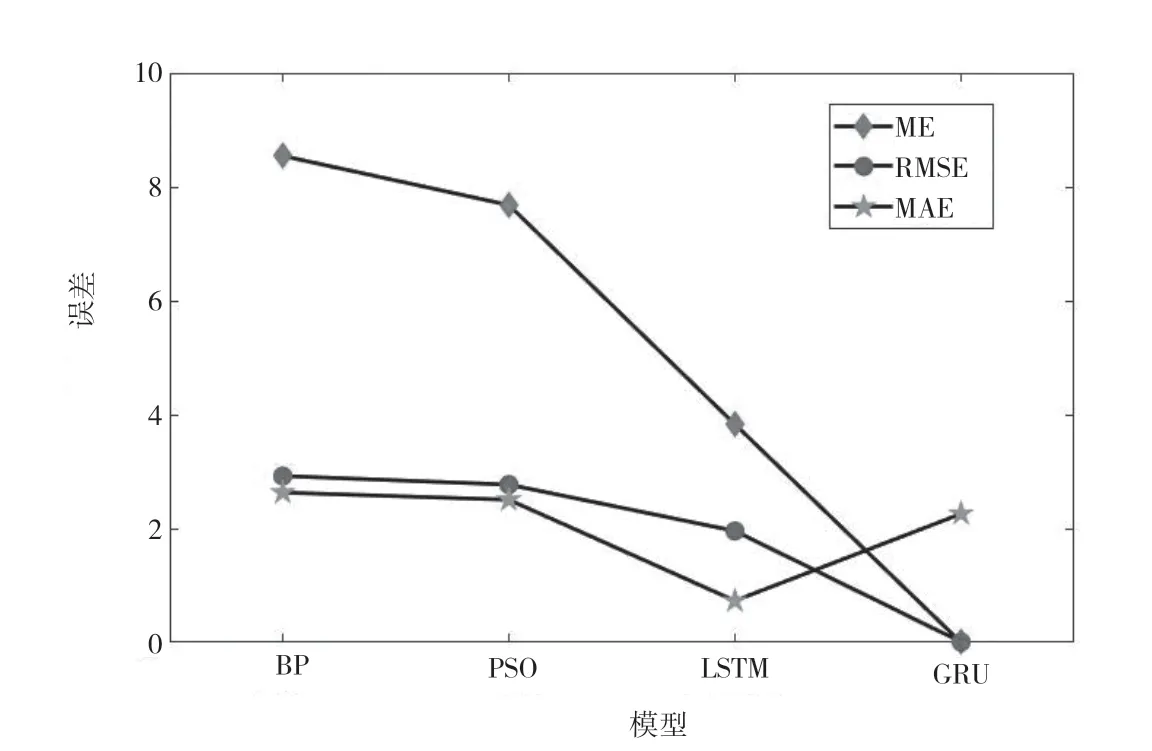
图3 通风机子系统模型预测结果对比
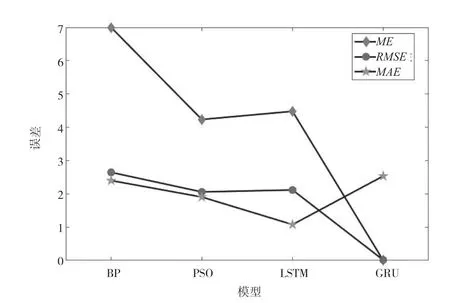
图4 提升机子系统模型预测结果对比
由于数据特征较为复杂,BP神经网络的模型复杂度不够或训练时间不足,无法充分捕捉数据特征,因此BP神经网络在该子系统中表现较差。PSO算法可以找到更优化的模型参数,表现比BP神经网络稍好,但是无法完全应对通风机数据特征的复杂性。LSTM和GRU都可以处理时序数据,具有记忆能力,能够捕捉数据中的长期依赖关系和周期性变化,更准确地预测通风机的运行状态,因此这2种算法在该子系统中表现最好。综上所述,通风机子系统的LSTM预测效果最好,其RMSE为1.956 962 397,说明其在预测通风机子系统的工作状态方面准确性较高。
3.2 井下提升机
提升机能够实时监测的运行状态,状态参数包括速度(V)、载荷(L)、行程(D)以及机械部件,例如轴承温度(Tb)、减速器油温(To)等[8]。这些参数的计算过程如公式(15)所示。
式中:Vinternal为提升机内部传感器速度;Linternal为提升机内部传感器载荷;Dinternal为为提升机内部传感器行程,Tbinternal为轴承内部温度;Tointernal为减速器内部油温。
为了形成提升机的状态向量Shoist,将上述参数整合为一个向量,如公式(16)所示。
井上监控系统将实时采集和记录状态向量Shoist。
接下来,引入故障指示向量Fhoist,其中的元素表示提升机可能的故障类型,例如轴承磨损或钢丝绳断裂等。监测数据和故障指示向量之间的关系如公式(17)所示。
式中:h(Shoist)为井下提升机故障指示向量,根据提升机监测数据Shoist判断可能的故障类型。这个函数可以使用机器学习方法,例如神经网络、决策树等,也可以基于专家经验构建。
一旦发现可能的故障类型,系统就会发出警报,同时提供相应的解决方案。具体诊断方法如公式(18)所示。
根据速度参数V判断轴承磨损的可能性和程度,分析监测数据,可以及时发现提升机存在的故障和异常情况。提升机子系统模型预测结果对比如图 4 所示。
由于数据中存在较强的非线性关系,而BP神经网络通常对非线性问题的处理能力较弱,因此BP神经网络在该子系统中表现较差。PSO可以找到更优化的模型参数,因此其表现优于BP神经网络,但是无法完全应对提升机数据中的非线性特征。LSTM和GRU都可以处理时序数据,具有记忆能力,能够捕捉数据中的非线性变化和长期依赖关系,更准确地预测提升机的运行状态,因此这2种算法在该子系统中表现较好。其中,LSTM的预测效果最好,其RMSE为2.116 594 768,说明其在预测提升机子系统的工作状态方面具有较高的准确性。
3.3 空压机
分析监测数据,可以及时发现空压机存在的故障和异常情况。空压机子系统模型预测结果对比如图5所示。
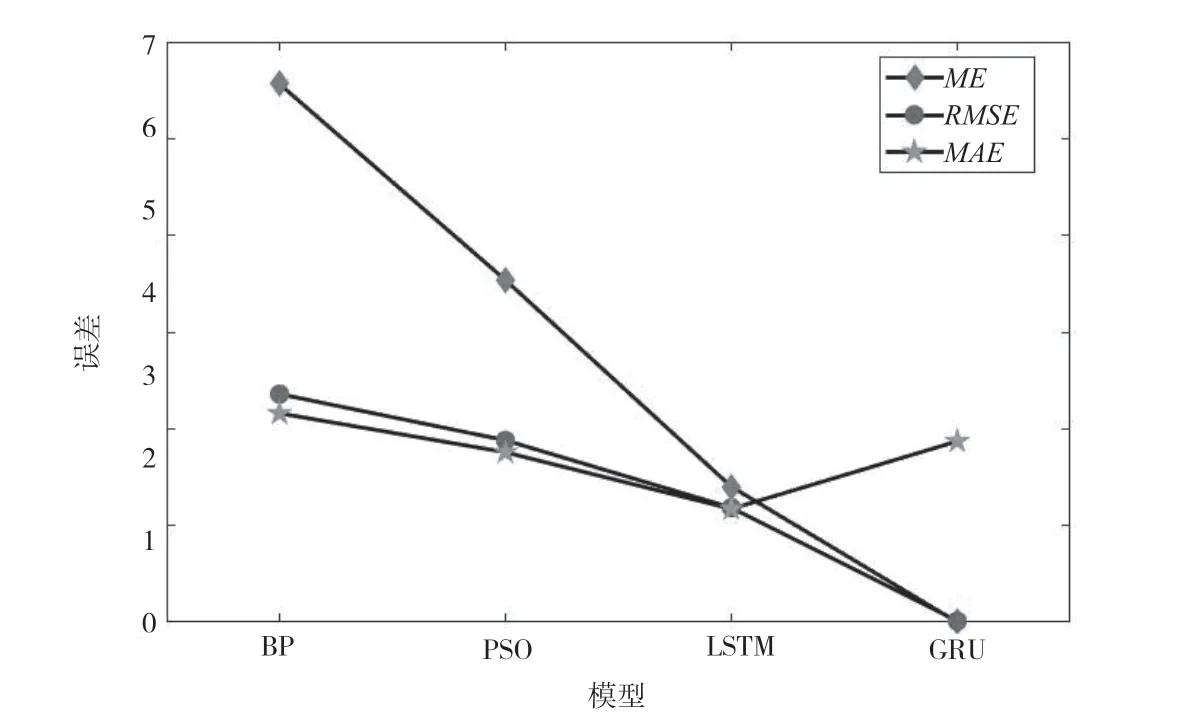
图5 空压机子系统模型预测结果对比
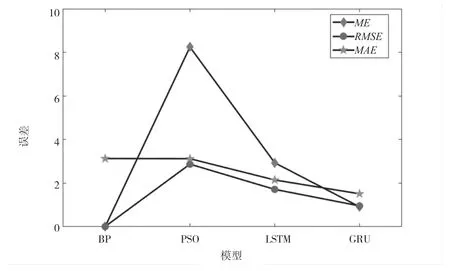
图6 瓦斯监测子系统模型预测结果对比
由于数据特征较为复杂,BP神经网络的模型复杂度不够或训练时间不足,无法充分捕捉数据的特征,因此BP神经网络在该子系统中表现较差。PSO可以找到更优化的模型参数,因此其表现优于BP神经网络,但是无法完全应对空压机数据特征的复杂性。LSTM和GRU都可以处理时序数据,具有记忆能力,能够捕捉数据中的长期依赖关系和周期性变化,更准确地预测空压机的运行状态,因此这2种算法在该子系统中表现最好。对空压机子系统来说,LSTM的预测效果同样最好,其RMSE为1.171 235 294,说明其在预测空压机子系统的工作状态方面也具有较高的准确性。
3.4 瓦斯监测
瓦斯子系统是矿井中至关重要的一部分,通常配备各种传感器,能够实时收集和传输数据,反映矿井中的瓦斯情况。这些数据不仅包括气体浓度,还有关于机械部件状态的信息,例如轴承温度、活塞磨损情况等。分析这些数据,可以及时发现瓦斯子系统存在的问题和异常情况。例如,当监测到瓦斯气体浓度异常或温度过高时,可能是瓦斯子系统的机械部件出现了故障,例如轴承或活塞磨损等。当瓦斯浓度异常上升时会触发警报,须优先疏散井下人员。瓦斯监测子系统模型预测结果对比如图 6 所示。
预测结果显示,BP神经网络在该子系统中表现较差,PSO可以找到更优化的模型参数,因此其表现稍好于BP神经网络。LSTM和GRU都对噪声具有一定鲁棒性,因此这2种算法能够更准确地预测瓦斯监测系统的运行状态,在该子系统中表现较好。对瓦斯监测子系统来说,LSTM预测效果最好,其RMSE为2.145 882 353,说明其在预测瓦斯监测子系统的工作状态方面也具有一定的准确性。
4 结论
本文探讨了电气自动化系统状态监测与故障诊断的实现方法,整理了一些常用的软硬件系统。本文分别探讨了每个子系统的特点、常见的故障模式以及适用的监测和诊断方法,并分析其应用现有算法进行数据识别和分析的能力。
在各子系统中,LSTM和GRU在处理时序数据、捕捉长期依赖关系和周期性变化方面具有优势,能够更准确地预测设备的运行状态。BP神经网络在处理非线性问题时可能存在一定局限性。
