基于机载激光雷达和数码相机的林木特征提取
2024-05-07李德亮田聪聪
王 宁 李德亮 田聪聪
(1.水发规划设计有限公司,山东 济南 250100;2.山东省国土测绘院,山东 济南 250100;3.山东智帆地理信息技术有限公司,山东 济南 250100)
机载激光雷达和数码相机能够提供高精度的森林结构和生物量信息,有助于评估森林碳汇功能。同时,森林生物多样性是维持生态系统健康和稳定的关键[1]。提取林木特征可以监测森林物种分布、种群密度和生态位等关键的生物多样性指标,为保护森林生物多样性提供科学依据。
森林健康状况直接影响生态服务功能和木材生产。利用机载激光雷达和数码相机提取林木特征,可以实时监测树木的生理状态、生长情况以及森林病虫害情况,为保证森林健康提供数据支持。林业资源清查是一项重要的林业基础工作,其工作内容包括调查资源分布、蓄积量和生长量。机载激光雷达和数码相机可以在大范围内获取高精度的森林资源信息,提高清查效率和准确性[2]。此外,应采取必要的措施进行生态恢复,对采伐过度或遭受破坏的林区进行再造林。本研究可以评估生态恢复和再造林的效果,为制定科学的生态恢复计划提供依据。本文基于应用数码相机与机载激光雷达进行研究,使人们更充分地了解森林资源和生态环境,提高公众的环保意识和参与度。
1 研究区与数据
1.1 研究区概况
随着全球气候变暖,为了应对气候变化,需要准确、快速地监测森林碳储量。因此,在设计方法前,需要分析研究区的概况。相关内容见表1。根据表1分析研究区的气候条件和气温条件,相关内容见表2、表3。

表1 研究区概况

表2 研究区气候条件

表3 研究区的气温条件
明确地区气候条件后,安排技术人员现场调研与勘查,发现林场的森林资源种类较多。为更直观地掌握研究区基本情况,勘查现场,明确研究区林场经营林地总面积为10 217.55 hm2,森林覆盖率88.6%,林木蓄积324 000 m3[3]。森林资源既是可再生资源,又是无形的环境资源,其本质属于具有开发潜力的绿色能源。因此,合理规划和利用森林资源对保护生态环境和经济发展都有重要意义[4]。为保证相关工作在实施中的规范性与合理性,以某试点区域为例,分析区域内树种面积与占有面积,见表4。
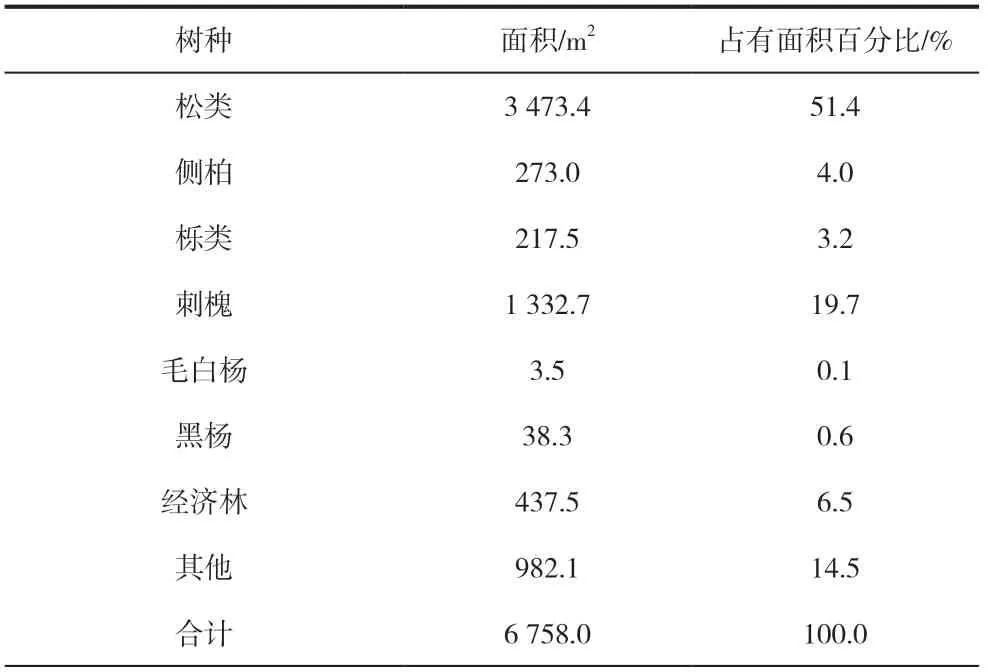
表4 试点区域树种面积与占有面积分析
1.2 研究区飞行设计
完成上述内容的设计后,使用激光雷达设备采集测区数据,激光雷达发射脉冲激光束照射地面或物体上后会被反射回来。通过测量激光束的往返时间,可以计算物体的距离。同时,激光束的探测角度也影响数据的精度和分辨率。
因此,在正式收集资料前,需要先确定被测量区域的界线,这对确定地面控制点和规划航线来说非常重要[5]。同时,测量区域内的地形条件,例如植被、建筑物等,都会直接影响制定飞行计划。另外,机载 LiDAR资料的最终用途也是制定飞行计划的重要参考。例如,为了得到1个更精确的数字地形模型,需要在研究区的植被覆盖范围内留出一定间隙,使观测信号能够穿过冠层,进入地表[6]。在高植被覆盖区域进行地面遥感反演,还须提高扫描频率,减少激光岐角,并降低飞行高度,增大空间密度并增强植被穿透力。本文以此为标准,设计研究区飞行路线,如图1所示。
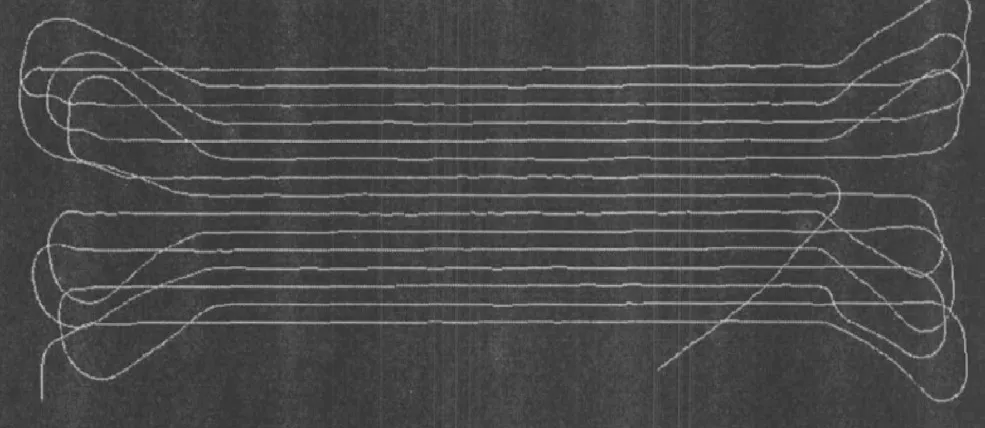
图1 研究区飞行路线设计
2 数码相机影像正射校正
当飞机飞行时,由于不可能精确地控制飞行平台,加上地表起伏,因此采集的数字相机图像出现了像点偏移、图像变形和尺度不一致等问题。针对这个问题,在利用机载激光雷达提取林木特征参数前,需要正射校正数码相机影像[7]。在平坦区,采用多项式几何改正方法,解决高精度航摄影像的正射改正问题。正投影修正原理如图2所示。
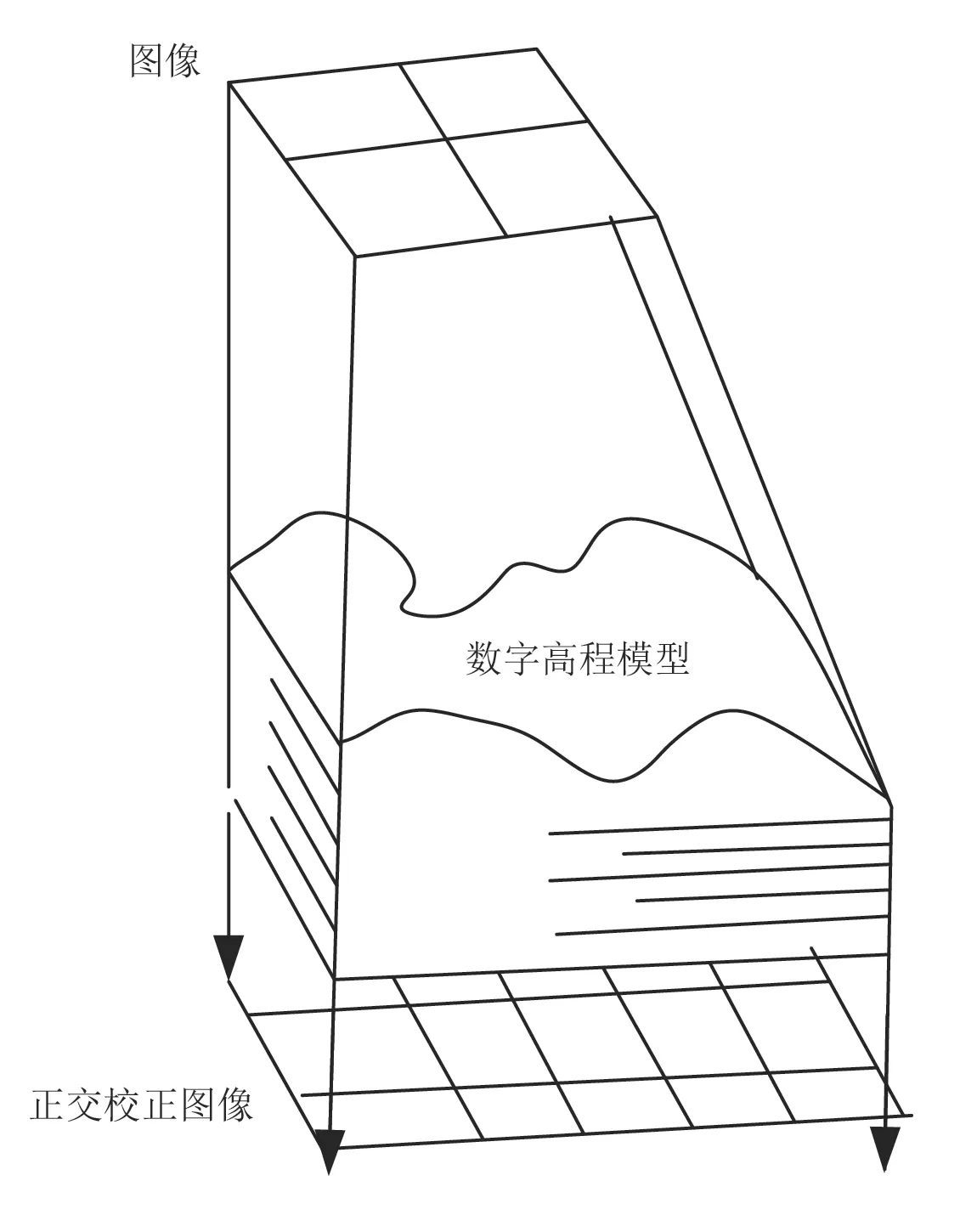
图2 数码相机影像正投影修正原理示意图
须采用微分校正方式修正框幅式中心投影的影像。由地表决定的平面位置为地表的正交投影,它与其对应的点之间的内在函数关系为共线方程。根据共线性公式,在给定航片内、外方位要素以及地面高的基础上,建立图点间的映射关系[8]。共线方程如公式(1)、公式(2)所示。
式中:x为横坐标共线方程;y为纵坐标共线方程。XA、YA和ZA为图点坐标;XS、YS和ZS为像点坐标;f为共线函数;a、b和c为转换系数。为实现二维图像之间的几何转换,假设定义任意一个像元为p。在原始图像和纠正后图像中确定一个节点,其坐标分别为p(X,Y)、p(X',Y'),两者之间的映射关系如公式(3)、公式(4)所示。
式中:fx(X',Y')和fy(X',Y')为直接法转换函数横、纵坐标;φX(X',Y')和φY(X',Y')为间接法转换函数横、纵坐标;fy为直接法转换函数;φX为间接法转换函数;X'为像元p的横坐标;Y'为像元p的纵坐标。将上述映射关系作为依据,生成数字正射影像,流程如图3所示。
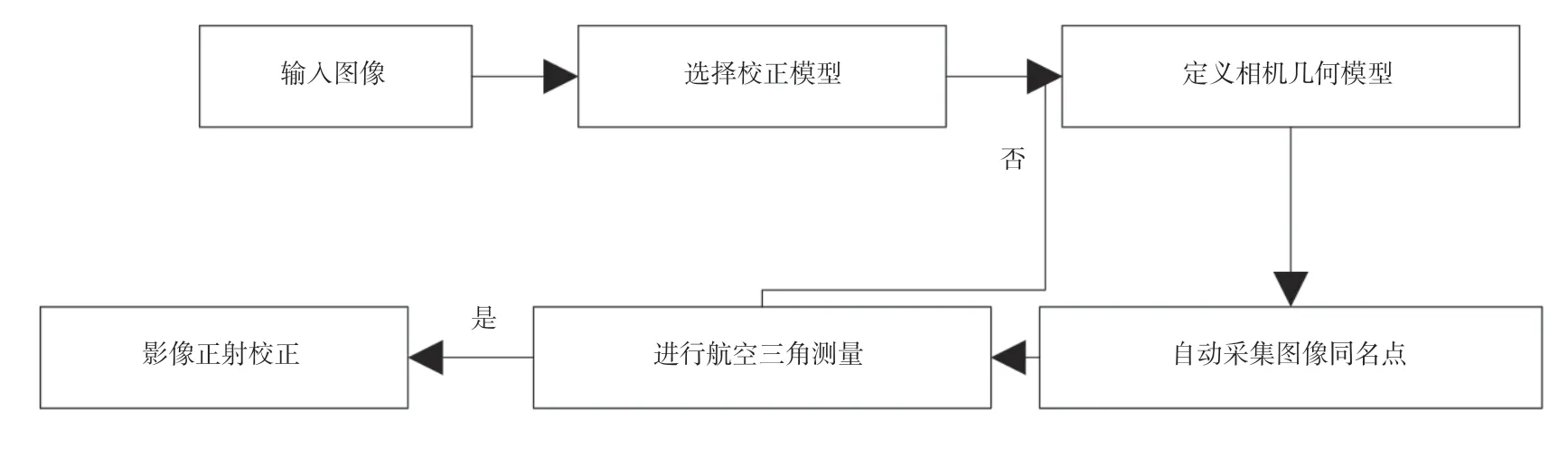
图3 数字正射影像生成流程
3 三维机载激光雷达扫描测量林木数据点云
在林木测量领域,点云数据可以提供准确的树高、树冠形状和树木间距等信息,这些信息对森林管理、森林保护和森林规划等方面具有重要意义。同时,这些信息也可以用于监测森林生长状况、评估森林生态效益等方面。机载激光雷达扫描获取的数据为点集,其在3D空间上呈不规则的点云分布,具有一定随机性。其中,既有现实地表的点位,也有人造建筑(楼房、烟囱、铁塔和输电线路等)以及天然植被(树木、灌木和草地)。对任意三维机载激光雷达扫描点集P{(p1x,p1y,p1z),(p2x,p2y,p2z),…,(pnx,pny,pnz)},初始化1个映射的权重集合W(ω1=ω2=…=ωn)。在权重集合W中,任意1个元素ωi的取值表示点集上的3 d点在数字高程模型(DEM)曲面上的作用权重,权重越大,DEM曲面的贡献度就越大。将表面f(X,Y)作为标准,对WP点集进行均匀化插值处理,并以此生成三维空间内的二维DEM表面。DEM表面上的任意一点(tx,ty,tz),存在下述关系,如公式(5)所示。
按照上述内容完成DEM迭代运算,直至1组距离的剩余值降至预定的某个阈值以下,或者已达到最大值。
4 林木特征数字高程模型归一化与林木特征分布图生成
机载激光雷达直接记录了地面目标的3D信息,激光雷达的探测波束能够穿透或部分穿透目标,在最终回波中有丰富的地面信息。本项目以研究区的一次回波数据为基础,采用插值法构建DEM,并对已分类的地表激光点(ASCII文件格式)进行插值生成,形成 DEM。
将森林特性DEM与数字地表高程模型(DSM)进行高度差分后,再通过DEM与DSM的高差处理,最终获得高精度的地物形态信息。在不同尺度上将数据进行对比,并进行归一化处理,将林木特征和地形信息映射至同样的数值范围,例如将它们缩放到0~1。目前,利用DEM与DSM获取数字影像学数据,其准确度决定了归一化数字地表高程模型(nDSM)的准确度。
在林区,nDSM与冠层高度模型是等价的。由于部分激光光斑可能来自冠层下部灌木等低矮植被,部分激光光斑对树高反演产生影响,因此,需要剔除一些高程偏高或偏低的测点。在此基础上,针对研究区内的树高分布特点,将﹤1.5 m、>35 m的点剔除,获得只含有植被高度数据的点云文件,并将其进行差分,从而获得对应的植被高度分布图。
5 结语
机载激光雷达和数码相机是森林调查和监测中的重要技术工具。这两者结合使用,可以有效地提取林木特征,对森林管理和保护具有重要意义。通过本研究,明确了林木特征提取是一项具有重要意义和应用前景的技术。该技术的出现改变了传统森林调查方法的局限性,解决了效率低的问题,实现了快速、准确和大范围的森林资源监测。
本研究具有以下4个优点。1)精度高。机载激光雷达可以获取高精度的地形数据,数码相机可以拍摄高分辨率的图像,通过数据处理和分析,可以得到更准确的林木特征信息。2)适用范围广。该技术可以应用于不同类型的森林,包括针叶林、阔叶林和混交林等,也可以应用于不同的地理条件和气候区域。3)实时性强。通过机载激光雷达和数码相机获取的数据,可以实时监测和分析数据,为森林管理和保护提供及时、可靠的信息。4)成本效益高。与传统的森林调查方法相比,基于机载激光雷达和数码相机的林木特征提取技术具有更高的成本效益,可以大幅降低调查成本。
在未来的研究中,可以进一步探索该技术在不同森林类型、不同地理条件下的适用性和优化方法,提高该技术的可靠性和精度。同时,还可以将该技术与现代信息技术、大数据分析等相结合,使森林管理更智能化、自动化。
