一种移动作业机器人环境交互作用模型分析
2024-05-07丁晓军
丁晓军 马 琴
(1.北方民族大学电气信息工程学院,宁夏 银川 750021;2.北方民族大学土木工程学院,宁夏 银川 750021)
由于劳动力短缺和人口红利逐渐消失,因此“机器人换人战略”迫在眉睫,移动作业机器人正是在这个背景下应运而生[1]。根据机器人与环境交互的特性,可将其分为2类。一类是机器人在自由空间中的非接触(无约束)运动,没有相关的环境影响施加在机器人上,例如抓取-放置、喷涂和电弧焊等简单任务[2];另一类是一些复杂的高级任务,例如装配和加工,需要考虑机械手与环境之间的耦合[3]。
本文分析了移动作业机器人与环境交互作用过程,并基于拉格朗日方程推导了接近、受限运动和冲击3种情况下机器人-环境交互作用模型。然后,仿真验证由4个麦克纳姆(Mecanum)轮构成的全向移动平台和由1个6自由度操作臂组成的移动作业机器人。
1 臂-环境交互作用模型
在机器人操作臂末端安装执行器,在进行作业的过程中,机器人将与环境接触。一般将接触任务划分为3个阶段,即接近、冲击和受限运动。在接近阶段,末端执行器向约束移动,以低速接近目标物,以避免碰撞。但是,在实际工况中,机器人会受到扰动影响,进而与约束发生碰撞,导致速度发生突变,冲击阶段结束后,开始受限运动阶段。为了便于描述,本文先分析接近(自由)阶段和受限运动阶段2个运动过程,然后分析冲击阶段。
1.1 接近阶段
操作臂与环境交互如图1所示。接近阶段如图1(a)所示,r为操作臂,e为动态环境。假设操作臂有nr个自由度,环境有ne个自由度,采用位置向量分别定义操作臂与环境的运动,则整个系统的位置可用一个统一的向量q表示,如公式(1)~公式(3)所示。
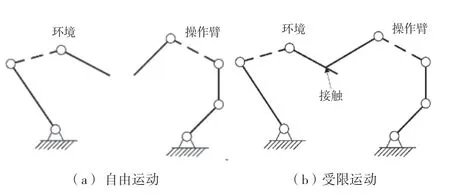
图1 操作臂与环境交互
式中:q的维数为n=ne+nr。
这2条链的动力学模型分别如公式(2)、公式(3)所示。
式中:,为速度;,为加速度;τe和τr为关节转矩矢量;He和Hr为惯性矩阵;he和hr为重力、科里奥利力(Coriolis force)以及其他与位置和速度相关的力。
1.2 受限运动阶段
受限运动阶段如图1(b)所示。为便于描述,2个链分别引入1组新的坐标(外部坐标)se和sr,令se=(se1,...,sen),sr=(sr1,...,srn)。坐标q与坐标s之间的关系表征了运动学模型。将坐标se定义为绝对坐标,通常集合se与qe一一对应,并呈非线性关系,如公式(4)所示。
操作臂末端相对环境即固定在链条(e)最后一环的坐标的坐标变换如公式(5)所示。
则整个系统的外部坐标如公式(6)所示。
外部坐标sr是为了便于描述给定的任务而定义的,当发生接触时,这些坐标中的一些值将减为0,当1个接触约束限制了nc个自由度时,nc坐标从集合sr减至sr-nc。f为自由坐标,将sf定义为整个系统自由坐标的集合,c为受接触约束,sc为包括受接触约束的坐标的集合,因此sf的维数为ne+nr-nc=n-nc,sc的维数为nc,如公式(7)所示。
约束(接触)如公式(8)所示。
从动力学的角度进行分析,由于接触产生反作用力,因此力分量的数目等于受限制的自由度的数目,在这种情况下的动力学模型如公式(9)、公式(10)所示。
式中:为操作臂与环境接触后受约束环境的雅可比矩阵;为操作臂与环境接触后受约束操作臂的雅可比矩阵。在公式(8)的约束条件下,公式(9)、公式(10)中的坐标qe和qr并不是独立的。因此,公式(8)、公式(9)以及公式(10)构成了整个系统的动力学模型,并表示ne+nr+nc个标量方程的集合,通过求解可得运动(qe,qr)和接触力F。为了得到适合数值积分的形式,对公式(8)进行求导,得到其约束的微分形式。
sc的一阶导数如公式(11)所示。
式中:为sc的一阶导数,为系统的速度。
sc的二阶导数如公式(12)所示。
式中:为sc的二阶导数,为系统的加速度;雅可比矩阵、与公式(9)、公式(10)中的相同,向量Ac如公式(13)所示。
公式(8)的微分形式如公式(14)所示。
公式(9)、公式(10)和公式(14)构成了整个系统的动力学模型。该模型包括ne+nr+nc个标量的线性方程,可以求解相同数量的未知数,包括ne维加速度分量,nr维加速度分量和nc维接触力F。
考虑摩擦因素,将集合sf分离为sf=(se,),包括nr-nc个坐标,摩擦力的方向与接触点的相对速度方向相反,如公式(15)所示。
式中:Ff为nr-nc个分量的摩擦矢量;|Ff|为其绝对值;v0为nr-nc个分量的矢量,它定义了相对速度的方向,其大小取决于接触力、表面质量和相对速度。选取|Ff|=μ|F|,其中,摩擦系数μ是常数。然而,精确的模型需要考虑相对速度矢量v0对μ的影响。矢量v0的方向由相对速度srf决定,如公式(16)所示。
式中:为操作臂与环境接触后未受约束操作臂的雅可比矩阵;为操作臂与环境接触后未受环境约束的雅可比矩阵。因此,v0与位置向量qe、qr和速度、均相关,摩擦力Ff如公式(17)所示。
公式(17)的具体形式视情况而定。
当接触点有相对速度时,摩擦系数μ从零速度下的静态摩擦变为动态摩擦,随着接触点相对速度增大,当摩擦系数克服发生运动的摩擦临界值时,摩擦系数由负黏性摩擦变为黏性摩擦。摩擦力的存在会影响系统的动力学特性,因此,考虑摩擦后,公式(9)、公式(10)变为公式(18)、公式(19)。
当接触物体间存在相对运动时,公式(14)、公式(18)和公式(19)构成了整个系统的动力学模型。虽然公式(17)中未知数的数量没有增加,但是需要求解、和F。
假设在某一时刻相对运动完全停止(=0),那么公式(15)和公式(17)将不再适用,公式(18)、公式(19)中的摩擦力Ff变得不可解,这时需要增加一个条件,从相对运动不存在这一事实出发,如公式(20)所示。
公式(14)、公式(18)、公式(19)与公式(20)构成了系统的动力学模型,通过该模型,可以求解加速度、和反作用力F、Ff。将模型计算的Ff值与系统静摩擦值进行比较,当其值大于静摩擦值时,会再次产生相对运动,求解过程切换回公式(14)、公式(14)、公式(17)、公式(18)以及公式(19)。
1.3 冲击阶段
冲击是接触任务的第二个阶段。面约束下的冲击是最常见的,因此本文主要分析面约束下的冲击问题。此时,sc(即坐标s6)变为0并且冲击作用会沿着这个方向进行。如果考虑约束面的弹性,则可能出现跳跃。为了便于推导,这里仅考虑非弹性范围内的冲击问题。基于这种假设,操作臂末端执行器不会在第一次接触后离开表面,而是沿着表面移动。
如果碰撞面是2个,则sc的维数是2,以此类推,当有nc个碰撞面作用时,sc的维数是nc。复杂的冲击会导致表面发生一系列碰撞,为了方便分析,在接下来的交互分析中忽略这种影响。
求解冲击动力学问题。在冲击区间上对约束运动模型进行积分,令t1为碰撞发生的时刻,t2为冲击结束的时刻,则发生碰撞的时间间隔为Δt=[t1,t2]。对几何约束和非弹性冲击来说,可以认为这个区间很短,即当Δt→0,t2→t1,在此区间内对公式(10)进行积分,如公式(21)所示。
公式(21)、公式(22)描述了冲击的动态过程。它们是6+nc个标量方程的集合,可以求解和FΔt,为六分量关节速度变化量;FΔt为nc个分量的冲量,当Δt→0时,FΔt≠0,即F→∞。在无限短的撞击时间内,位置不会改变,即q1=q2。
基于碰撞过程发生的3个阶段,采用数值方法求解具体碰撞任务的一般过程。在接近阶段,对公式(3)进行积分,并检验sc的坐标值;当sc坐标值变为0时,转向冲击公式(21)、公式(22)并计算速度变化量。利用这个新的初始状态,对公式(10)和公式(14)积分来求解约束运动的动力学方程。综上所述,当sc为0时,接近阶段结束,在那个瞬间碰撞时间间隔非常短,随后开始较规律的受限运动。
2 仿真分析
建立由4个Mecanum轮构成的全向移动平台和1个由六自由度操作臂组成的MMR仿真模型来验证本文采用的交互作用分析方法的有效性。机器人的设计参数[4]见表1。对臂-环境的交互作用进行仿真,时间间隔设为t∈[0,2] s,地面倾斜角θm、侧倾角γm设为0°。

表1 机器人的设计参数
本文以典型的有摩擦接触任务-写字任务来分析臂-环境交互作用。为了简化计算,将小车固定,控制操作臂写汉字“一”,如图2所示。写字任务从A位置开始,在接近阶段由PD调节器控制机器人。
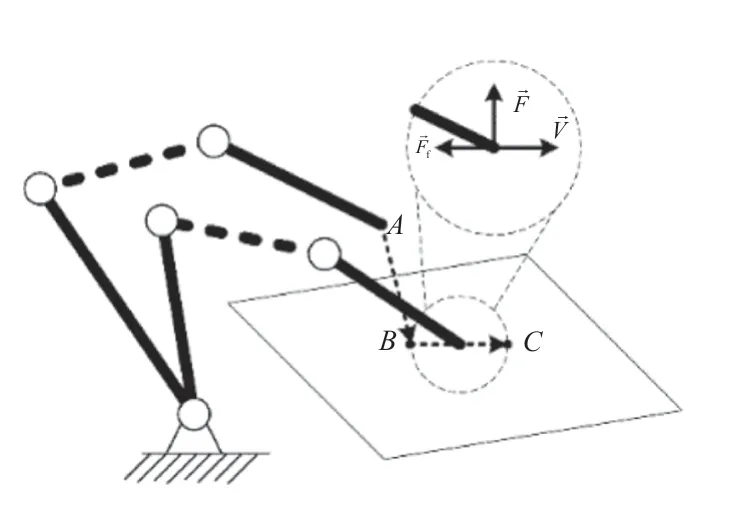
图2 六自由度操作臂执行有摩擦的接触任务
机器人从A到B的运动结果如图3所示,即坐标x、y和z随时间的变化以及其速度随时间的变化。通过分析,得到如下结论,预期的非零速接触是合理的,当参考轨迹没有碰撞时,机器人末端到达表面的速度不为0,如图3(e)所示。
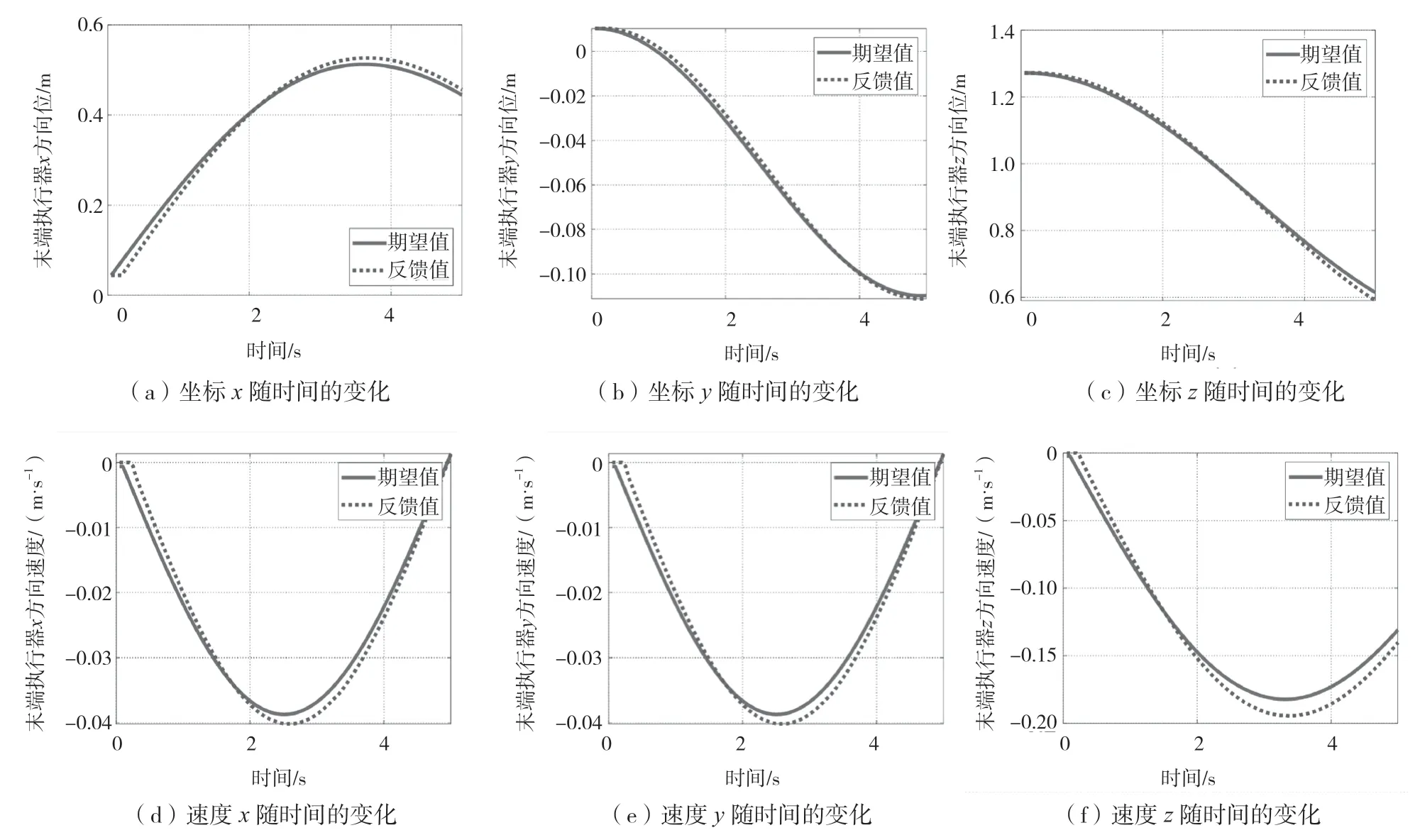
图3 臂-环境交互:接近阶段
冲击阶段各关节瞬时速度的变化曲线如图4所示,冲击时间为5 s。撞击后会发生堵塞,速度降至0。
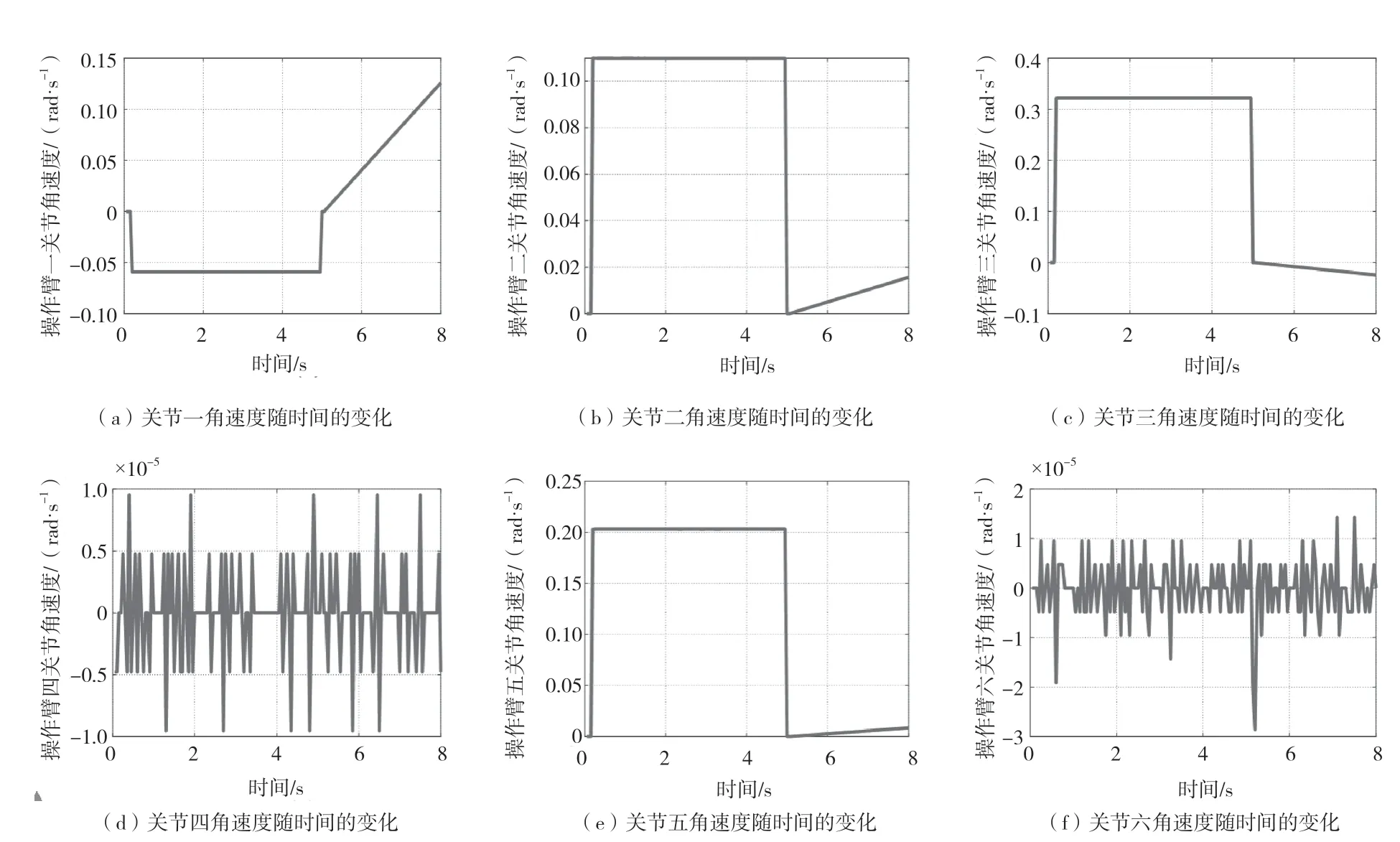
图4 臂-环境交互:冲击阶段
采用经典的力/位混合控制实现约束运动。操作臂x向位置和速度曲线随时间的变化如图5所示。可能会看到机器人的尖端停止在C位置,但是不会立即开始往回移动,这是因为发生了“堵塞”(实则为接触运动的黏着阶段),所以堵塞周期约0.05 s。之后,机器人的末端运动指向B。
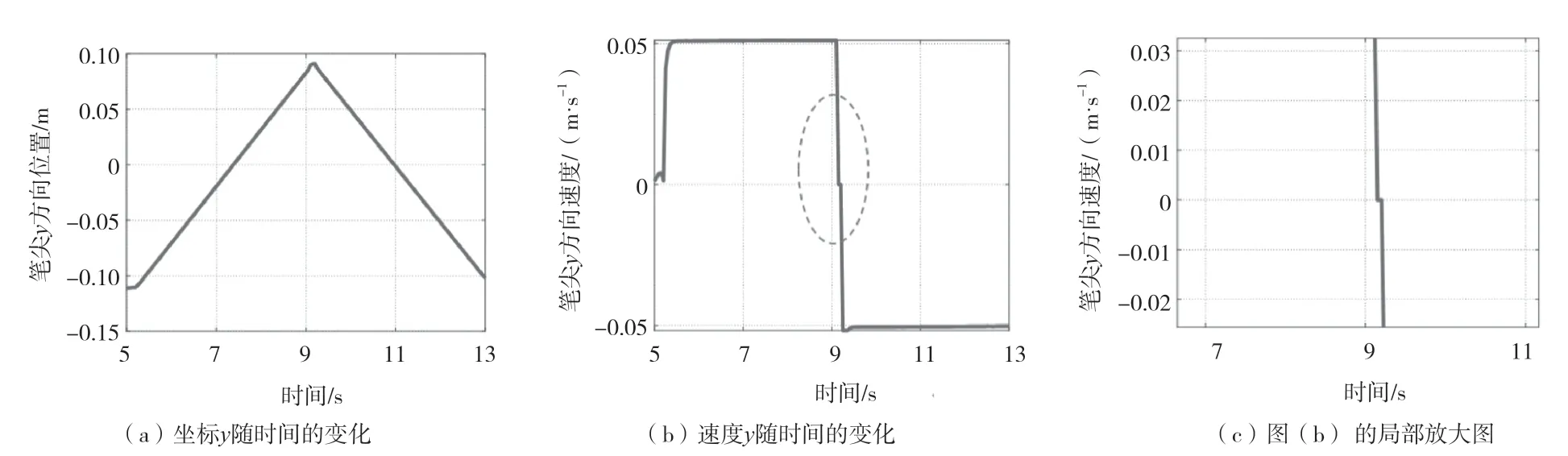
图5 臂-环境交互:受限运动阶段
反作用力F和摩擦力Ff的摩擦力方向在点C发生了变化,但是没有立即变化,如图6(c)所示。在阻塞过程中,摩擦力上升,当它达到μF值时,操作臂末端再次开始运动。反作用力F会有波动,这是因为实际机器人并不是纯刚体。
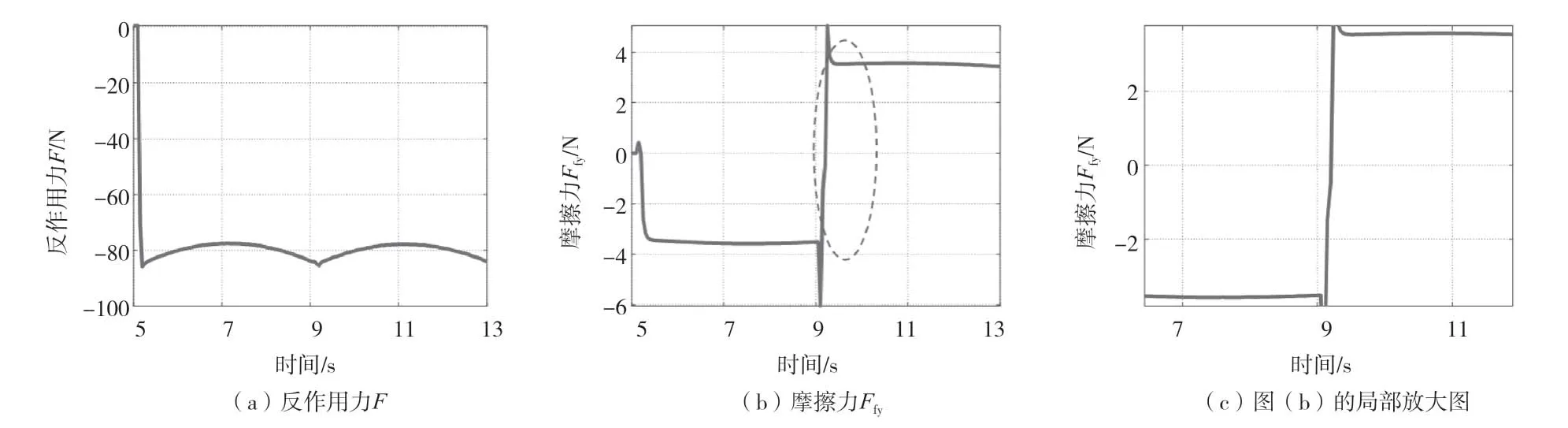
图6 臂-环境交互:接触点的力
3 结论
本文基于拉格朗日方程推导了在接近、冲击和受限运动3个阶段的机器人-环境交互作用模型,并对其进行了仿真分析。仿真结果验证了交互作用模型的合理性和有效性,为建立完整的移动作业机器人动力学模型提供依据。
