基于移动终端双模定位的多场景入侵报警方法
2024-05-06许放欧清海张晖艾雪瑞程方圆
许放,欧清海,张晖,艾雪瑞,程方圆
(北京中电飞华通信有限公司,北京 100070)
入侵报警系统(Intruder Alarm System,IAS)是安防领域的研究重点,该系统通常利用各类探测器对防范区域内的非法入侵行为进行威慑和报警,以确保目标防区的安全。入侵报警系统主要由前端各类探测传感单元、传输单元、警报单元与数据分析控制单元等组成,并被广泛应用于各类安防项目的边界、入口等场景中。
目前在入侵报警领域,常见的报警系统主要包括脉冲/张力式围栏系统、定位探测系统、对射/互射式红外光栅系统、振动光纤报警系统以及激光探测报警系统等。其中定位探测系统的应用较为广泛且适应性强,可用于多种场景下的入侵检测。其主要利用传感器设置安防边界,通过探测系统采集入侵者的位置信息,并上传至数据分析控制平台追踪入侵者的实时位置,同时发出警报信息。因此对于定位探测报警系统而言,入侵者的检测以及精确定位算法[1-3]是技术方案的核心。文中面向定位入侵报警系统,设计了一种基于移动终端双模定位的入侵检测算法,并将其应用于不同的场景中,证明了算法的可靠性,为入侵报警技术的进一步发展提供了理论支撑。
1 技术理论设计
1.1 系统总体方案
为了实现安全区域的实时入侵监测、无线传输以及自动报警等功能,文中构建了如图1 所示的入侵报警系统。该系统包含传感器节点网络构成的监测模块、移动终端模块、无线传输模块、中心数据处理模块、自动报警模块和客户平台等部分。

图1 系统总体设计框图
1.2 系统硬件搭建
首先将若干传感器和移动终端布置在目标区域内形成无线监测网络,二者的数量由目标区域的大小所决定。当遭遇非法入侵时,检测网络通过移动终端定位技术来获取入侵者的定位信息;同时通过无线传输模块将实时信息发送给中心数据处理模块;然后该模块通过入侵检测算法计算入侵者的定位信息,发出指令控制自动报警模块,并将入侵者的定位轨迹发送至安保人员和客户平台。具体的系统模块参数如表1 所示。

表1 系统模块参数信息
1.3 UWB和ZigBee的双模融合定位
超宽带技术(Ultra Wide Band,UWB)是一种无载波通信技术[4-6],其具有较强的抗扰能力,可以使定位误差降低到极小值。同时,该技术还具有对信号衰落不敏感以及发射信号功率谱密度较低等优点,因此被广泛应用于高精度定位场景。ZigBee 是一种无线传输网络[7-9],通过设置若干移动终端传感单元来划分特定区域,这些移动终端会对区域中的人员信息进行采集并使用ZigBee 无线网络传输至中央数据处理单元中,进而完成对区域和人员的管理。文中利用UWB 和ZigBee 的特性来实现双模入侵定位。
当每个UWB 移动终端和ZigBee 网络均收到传感器到达信号强度差(Signal Attenuation Difference of Arrival,SADOA)及到达时间差(Time Difference of Arrival,TDOA)等参数时,则每个移动终端模块均可以得到一个定位结果。然后通过加权处理将SADOA 和TDOA 二者的定位结果进行数据融合来获得精确的定位信息,以便于后续入侵算法的识别。
2 基于双模定位的入侵检测
2.1 SADOA/TDOA定位融合算法
文中采用最速下降法(Steepest Descent Algorithm,SDA)对SADOA 和TDOA 进行数据融合,以此获得较为准确的定位信息。SDA[10]的核心:根据不同方法的测量参数构建估计误差函数f(ui),目的是将误差降低至最小值,即寻找合适的误差因子ui,使入侵者与移动终端之间的距离尽可能地接近实际距离ri,则有:
式(1)中,c为光速。而利用TDOA 和SADOA 测量数据得到SDA 的误差公式分别为:
式中,σ为算法迭代步长;s和j为迭代次数;i及m则分别对应TDOA 与SADOA 测算规则中参与定位的终端数。对式(4)和式(5)进行迭代运算,不断更新ui值并将其代入式(6)和式(7)中,即可求解矩阵参数H、Yi分别为:
再将上述参数代入式(8)中分别求解对应的位置精确值ZSADOA和ZTDOA:
然后将ZSADOA和ZTDOA进行误差运算,代入式(9)中,并取i=m,k=l,确保在相同迭代条件下完成坐标定位。
通过上式确定误差ε后,即可由算法迭代反演运算得到精确的位置坐标。
2.2 改进的入侵检测算法
改进的入侵检测算法框架如图2 所示。

图2 计算流程图
通过对入侵者定位信息进行预处理,再使用改进的卷积神经网络算法(Convolutional Neural Networks,CNN)实现特征提取和分类识别[11-13],具体流程如下:
1)读取融合处理后的定位信息,并在遗传算法(Genetic Algorithm,GA)的基础上采用粒子滤波(Genetic Particle Filter,GPF)算法[14]进行处理,以便于计算机完成预测运算。
利用GPF 算法,根据入侵者双模定位的精确坐标数据信息建立状态方程,并选取状态变量:
基于上述参数,便可确定系统状态方程如下:
式中,p(x)为先验概率,q(x)是重要性概率密度函数,至此定位信息处理完成。
2)将上述得到的定位信息输入如图3 所示的改进CNN 卷积神经网络中进行识别,当识别到入侵信息时,系统将实时标记并触发警报。
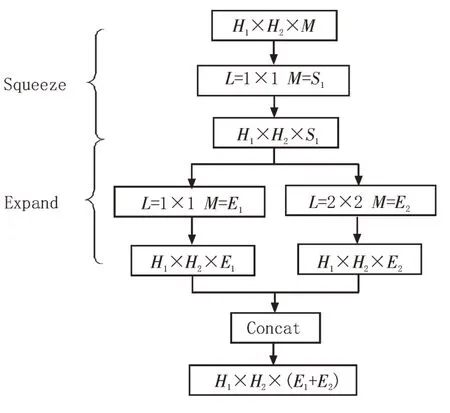
图3 改进的CNN结构
改进的CNN 结构在原始算法的基础上引入了残差结构(Residual Network,ResNet),用以提升神经网络的性能,而卷积层则由Squeeze 和Expand 两部分构成。其中,H1和H2均表示定位数据的坐标;L、M分别表示卷积核的大小与个数;S1为Squeeze 层中1×1 卷积核的数量;E1和E2分别为Expand 层中1×1、2×2 卷积核的数量。ResNet[15-16]能够在对网络模型体积、单张推理时间仅产生较小影响的前提下,提升分类模型的准确率。然而在Module 增加至三个后,其准确率的提升也会达到峰值。因此,文中采用如图4所示的3Module 残差结构。
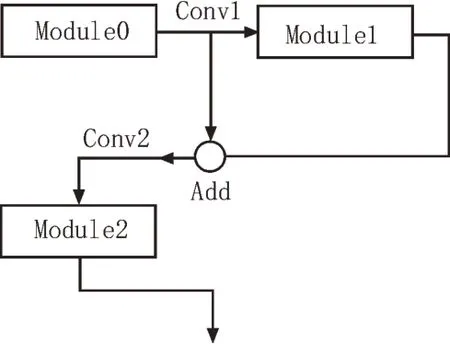
图4 基于CNN的3Module残差结构
3 实验仿真验证
该文以OpenCV 和Tensorflow 深度学习框架为基础搭建测试平台。通过传感器模块和移动终端划定特定区域,进而设置无线监测网络,并将一定时间内的行人作为入侵对象进行检测实验,且划定了四块不同的区域完成场景测试。此外,在测试的同时还提取了样本进行学习训练以优化入侵算法,并将其与文献[1-3]的同类入侵报警算法进行对比。文中通过误检率和漏检率来判断所提入侵检测算法的精确度。若双模定位检测到非人入侵时,将定义为误检;而当入侵对象高速入侵区域并迅速离开,定位信息与算法并未及时识别入侵信息时,则将该种情况定义为漏检。与此同时,不同场景的入侵实验在相同的软硬件条件下进行。图5、图6 分别列举了在特定住宅安防和公园场景下,不同入侵算法的误检率,且所有实验数据均以入侵报警器的触发为准。

图5 住宅区域误检率对比

图6 公园场景误检率对比
根据上述实验数据得出,随着安防区域的增大,各类算法的误检率均在逐步提升。但相较于同类型算法,文中算法的误检率始终较低,且在背景相对单一的住宅安防场景下,其误检率可低至4%以下。而随着检测次数的持续增加,样本量也在逐渐提升并会促进算法进行训练,使得入侵识别越发精确。同时,文中还通过对比住宅和公园两种场景下的漏检率,进一步验证该算法的性能,具体结果如图7 和图8 所示。
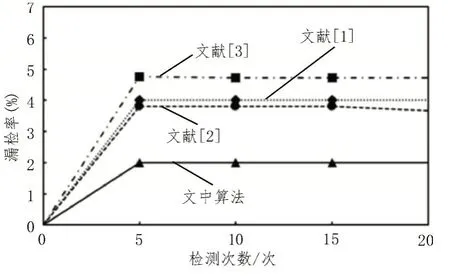
图7 住宅漏检率对比
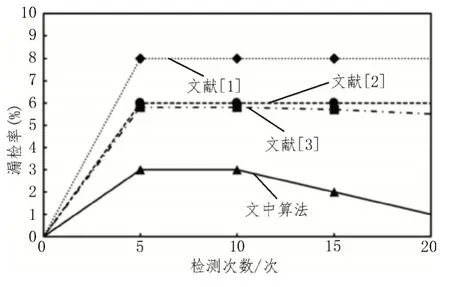
图8 公园漏检率对比
由图8 可知,随着安防区域的扩大,漏检率也逐渐上升;而随着检测次数的增加,漏检率则基本保持不变。但在公园安防场景下,文中算法的漏检率随着检测次数的增加显著降低,而在住宅场景下基本不变。原因在于公园场景下的不确定因素偏多,可训练的样本种类也较多。此外,由于文中算法融合了遗传算法粒子滤波和基于CNN 的3Module 残差结构,使得其具有精确的识别率以及快速的响应能力。综上所述,文中算法各方面性能均优于同类算法,且适用于多种不同场景下的入侵检测。
4 结束语
为了优化定位探测入侵报警技术,文中提出了一种基于移动终端双模定位的入侵检测算法。利用UWB 和ZigBee 的双模技术优化定位策略,设计了改进入侵识别算法,以精确识别入侵者且进行实时报警反馈。经对比实验验证,该算法的性能优于同类型方法,在大小场景下也具有较低的误检率与漏检率,说明其入侵检测速度和精确识别率均能得到保障。