激光SLAM 在AGV 平台构建地图及处理异常的应用
2024-05-06陈家锐
覃 雄,陈家锐
(1.广西沐邦高科新能源有限公司,广西 梧州 543000;2.梧州职业学院,广西 梧州 543000)
1 激光SLAM 概述
SLAM 是Simultaneous Localization and Mapping的英文缩写,即为同步定位与建图[1],是AGV 在没有完全启动之前在环境中进行地图创建,利用AGV 原有的轮廓激光传感器对环境的轮廓进行扫描,然后根据扫描的轮廓生成环境物理地图。AGV 依据生成的轮廓地图实现自主定位,通过激光测距并结合SLAM算法规划AGV 行驶的路线。
激光SLAM 建图主要是依赖于事先离线的地图文件,因此在SLAM 建图之前需要确保建图环境必须满足以下的条件:
(1)建图环境中的轮廓特征需要显著突出,有利于AGV 扫掠定位,比如:柱状物体、长方体等棱角轮廓显著的物体。
(2)在建图环境中,没有规模成片影响定位的物体,如透明玻璃、强反射物体、大型网状物体等,在此类环境中SLAM 建图容易引发AGV 定位失误,AGV走偏等非正常现象。
(3)SLAM 建图结束后,建图环境不能变动太大,否则影响使用。如工厂有大体积物体在建图后进入,就要实施人员重新建图。
(4)针对长距离的连续走廊环境,由于左右两边环境轮廓扫掠结果一样,SLAM 建图极其容易发生定位异常,在这种环境下建图时需要实施人员提前对环境进行改造,在不同区域放置不同外形的物品,确保走廊不同位置扫掠轮廓具有明显差异,避免出错。
(5)SLAM 定位的精度没有二维码定位精确度高,并且SLAM 定位比较适用对定位精度要求不高的环境,对于密集型仓储的环境不建议使用SLAM定位。
(6)第一次进行SLAM 建图时,实施人员要将全部环境区域进行一次扫描:一是实施人员可使用SLAM 建图小推车,二是实施人员也可以进行遥控AGV 移动的方式进行。需要特别注意是,进行建图扫描时,必须要尽量覆盖到所有AGV 行走路径区域,对于特别关键位置务必进行重点扫描,并且所扫描的路线必须闭环,闭环区域要预留一定面积,最理想状态是一个外凸形状,从而提高SLAM 定位的精确度[2]。
(7)地图构建结束后,如果每次场地环境变更较大时需要重新对原有地图进行修改或补充,主要是确保构建的地图与现场环境的吻合度一致,以提高SLAM 定位的精度。
2 SLAM 在线建图方法及步骤
SLAM 建图一般分为在线建图和离线建图两种方法。在线建图是指在建图时,AGV 小车激光数据实时上传到建图客户端进行定位数据处理,即时创建地图[3]。经过系列应用及实战研究,以M 公司应用研究为例,得出SLAM 在线建图的方法及步骤如下:
(1)检查IP 地址。确保AGV 小车端IP 与电脑端IP 要在同一个网段。在线建图前的准备,由于激光采集的数据信息量很大,所以需要利用通信数据线将AGV 和电脑连接起来,这里要特别注意。
(2)连接SLAM 客户端。双击“EXE 启动按钮”,在页面中点击“设置”选项,选择“显示机器人面板”,然后调出AGV 的登录界面。在AGV 界面中对应输入AGV 的固定IP,端口码通常为默认,无需变动,然后点击“连接小车”选项,在完成客户端与小车的连接之后,界面就会显示出AGV 小车信息的界面。
(3)工作模式选择。“工作模式”要选择“构建地图”选项的模式,假设当前显示是其他工作模式时,AGV 小车会自动进行重启,此时需要等待AGV 启动结束后,再进行一次连接客户端操作。
(4)修改激光配置信息。点击“设置”,找到“激光配置”信息,需要确认板面上显示的激光参数要与实际AGV 激光参数保持一致;如果不一致,需要修改,并点击“修改配置”选项进行保存。
(5)在线采集。完成以上操作之后,可以在SLAM客户端页面中点击“在线采集”选项,这样实施人员就可以进行建图了。
注意事项:①进行建图前需确保AGV 小车与环境边界平行,防止建好的地图与实际环境边界形成角度;②实施人员注意缓慢匀速推动AGV 小车前进,需要将AGV 行走路径区域的环境要全部扫描到位;③扫描到有转弯环境时,要保证AGV 小车有足够大的运行轨迹弧线,扫描完成时的终点要和起始位置要求形成一个具有圆形的闭环;④完成采集后要及时保存。
3 建图结果检验
3.1 地图一致性检验
通常是在实施人员完成建图后,就需要对所建的地图进行有效性检验,其主要目的是为了避免存在异常轮廓数据地图被使用,导致AGV 导航定位发生异常[4]。经过研究,总结出主要判定原则,让SLAM 地图构建者更好地对已构建的地图进行评价,确定地图的可用性,避免构建存在有异常或不可用的地图。因此需要对地图进行一致性检验。
所谓的地图一致性,可以解释为同一物体在地图中应当只存在一个轮廓特征与之对应,即地图轮廓数据的唯一性。地图一致性是判断地图构建结果最关键指标之一,主要用于检验建图的重复精度。地图出现不一致的根本原因是AGV 经过同一位置时的定位结果差异较大,导致映射到地图上本应是相同轮廓的物体处于不同的位置现象。地图一致性不达标原因有:
(1)未进行闭环检测导致地图不一致。当同一物体构建出了两个轮廓时,这种情况就是最常见的地图不一致现象。当这种情况出现时,一般是因为在采集数据构建地图时实施人员没有及时进行闭环操作,从而导致累积误差一直存在,没有消除的累积误差直接造成地图的不一致。
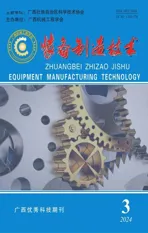
(2)闭环检测出错导致地图不一致。此外,错误的闭环检测也会有可能导致建图的不一致。例如在较长走廊环境构建地图时,就会极其容易出现错误闭环检测。小车在长走廊内发生“绑架”,导致地图构建结果的不一致。这种情况即使闭环也无法消除误差,当出现这种情况时,需要在长走廊内粘贴反光板并重新采集数据进行建图或者在长走廊放置不同的标识物体,借助反光板辅助定位来避免AGV 被“绑架”,如图1所示。
图1 AGV 被“绑架”现象的典型地图
3.2 地图绝对位置检验
地图的绝对位置检验主要用于检验地图的绝对精度。通常由于测量手段存在的缺陷,一般来说,这种检验需要借助现场已有的精准尺寸的布局图或CAD图纸结合来进行评估。但是,由于遮挡的原因,布局图或CAD 图纸上的墙壁在SLAM 地图中的轮廓可能会不完整,这也会对评估绝对位置造成一定的影响。
4 建图异常环境评估及改造
当AGV 在实际工作运行中频繁出现异常的时候,尤其是在雷达激光测量出现异常情况时,比如存在铁丝网、细小物体、网体的工作环境,在这种环境中频繁出现激光检测异常时,则需要对工作环境进行改造后,才能保证激光测量的稳定性,提高SLAM 定位的稳定性。
4.1 细小物体导致的建图异常及改善措施
异常原因:通常来说,为保证激光回波数据的稳定性,激光光束截面一般都呈现一个锥形测量的光斑,且随着激光距离的增大,维形光斑尺寸随着增大,以保证远距离的障碍物也有足够的回波以实现稳定的距离测量。基于这种测距原理方式,当被测物体的尺寸小于激光光斑大小,表明该物体的反射面较小,反射较弱,容易导致激光测量的不稳定。针对这种环境导致的异常情况,需要做的措施是:可以在铁丝网或者细小物体存在区域固定上普通材质的板材,加大被测物体面积尺寸;或者在环境中合适位置贴上反光板,利用反光板来辅助检测定位,提高激光测量的稳定性[5]。
4.2 透明物体导致的建图异常及改善措施
在建图环境中,当环境存在比较透明物体时,比如玻璃物体,将会产生异常,异常机理如图2 所示。

图2 透明环境的异常机理
(1)异常原因:①当激光的检测光束打到玻璃物时,因玻璃是透光,只有小部分脉冲能量被玻璃立即反射回去,而大部分脉冲则会投射到靠玻璃后方的物体上;②如果玻璃后方反射物体的回波强度比玻璃回波强度大时,则激光返回的测距结果就为后方物体的测量距离,反之则为玻璃的测量距离;③如①、②所述,在这种环境场合情况下,容易导致激光测量的物体距离存在不确定性因素,进而也会导致测量数据的不稳定。综上所述,对存在透明物体的环境,导致建图异常的根本原因就是材料透光性[6]。
(2)异常处理方法:为了解决透明物体透光特性,避免激光SLAM 检测异常,最有效的方法就是:①在透明物体区域贴上不透明或者半透明指定材质,以用来保证激光光束不能全部透射过去,提高测量稳定性;②在环境中合适位置贴上反光板,辅助定位。总之,就是让透明的物体改造成不透明或半透明或漫反射表面。
4.3 镜面反射导致的建图异常及改善措施
在建图环境中,可能存在容易发生镜面反射的物体,如反射镜子、光亮不锈钢等[7]。
异常原因:当激光光束打到镜面反射较强的物体时,大部分脉冲能量被镜面反射到另一个方向,此时如果激光入射角较大的时候,反射波角度与入射波差异很大,导致激光雷达无法接收到反射波激光测距无效。因此,在存在镜面反射情景建图时,容易导致建图异常,应该避免。
异常处理方法:在镜面反射区域贴上不透明或者半透明指定材质(一般为漫反射)的贴纸,以保证激光光束不能透射过去,提高测量稳定性[8]:或者在环境中合适位置贴上反光板,辅助定位,提高SLAM 定位精确度。
5 导致激光SLAM 导航算法异常的场景
5.1 环境频繁变化的场景
异常原因:激光SLAM 定位基于当前观测激光轮廓数据与事先构建完成的SLAM 地图进行匹配得到,当场景变动频繁时,这种情况极其容易导致观测的激光轮廓数据与SLAM 地图重合度较低,降低激光SLAM 定位精度。尤其是在仓储环境下,因为仓库里面的货架、AGV 较多、以及AGV 相互间遮挡激光数据等,且有效特征轮廓也比较少,这种环境下的激光SLAM 定位精度也不高。
解决方案:在仓储环境这种高密度环境一般不建议使用激光SLAM 导航方式,例如采购固定磁条轨迹导航方案。
5.2 激光发射面高度附近轮廓差异大
异常原因:由于激光束为逐渐扩张的锥形,由于AGV 车身抖动、地面起伏不平、激光倾角等因素,可能会导致激光测量光斑在测量点附近上下摆动。因此,当激光测到上下不一致的物体时,因激光光斑的移动导致不同位置激光测量的实际点位产生较大偏差,激光呈现不规则形状。
解决方案:像这种问题应尽量在产品设计层面解决,保证激光倾角在合适范围(上翘0.5°左右),并且激光安装高度尽量在轮廓稳定的高度附近。当SLAM AGV 车型已经确定,建图实施人员应当评估现场机台高度、场地环境的轮廓,特别是激光高度附近的轮廓,确定SLAM 激光测量高度附近轮廓的稳定性。
6 结语
对激光SLAM 在AGV 平台构在线建图的应用及研究得到:(1)提出SLAM 构建地图准备工作要点以及SLAM 建图结果可用性评价关键点;(2)提出SLAM建图环境异常原因及改进解决方案;(3)提出导致激光SLAM 导航算法异常的场景。研究成果对于激光SLAM 构建地图实施者具有一定的学习指导意义。
此外,为了进一步改善激光SLAM 在AGV 平台构建地图精度及效率,需要从实施技术、组织管理、技术推广培训等多方面入手。提高项目实施技术水平,是根本上提高地图精度及建图效率的方法。通过组织管理,避免生产过程、来料过程、仓库存储等环节对激光SLAM 在AGV 平台构建地图产生精度影响,可以减少约90%环境因素的误判。技术推广培训,则是让生产全员提高技术素养,避免生产工认识不足导致误操作,避免造成人为错误。全方位综合提升,才是解决建图异常问题最有效最根本的手段。