基于机器视觉的电梯曳引轮滑动检测方法研究
2024-05-06李雨风唐力方李发潜
李雨风,唐力方,李发潜
(广西壮族自治区特种设备检验研究院,广西 南宁 530299)
0 引言
随着经济的持续繁荣,高层建筑如雨后春笋般涌现,电梯也因此成为现代建筑中的关键组成部分。在这一领域中,曳引电梯凭借其卓越的性能和广泛的适用性,已成为使用最为普遍的电梯类型之一[1]。曳引电梯的运行依赖于曳引轮作为其动力源,这种动力传递是通过曳引轮与钢丝绳间产生的摩擦力来实现的,从而使电梯厢能够顺畅地上下移动。然而,随着电梯使用时间的不断增长,曳引轮和钢丝绳都会不可避免地出现一定程度的磨损现象。这种异常滑动会影响电梯的安全,造成电梯事故[2]。然而,现行国家标准和安全技术规范中并未具体阐述一种明确的滑动定量检测手段或失效的判定准则,因此对电梯曳引轮滑移进行定量评价成为电梯安全研究的热点问题。
冯子朔等[3]从钢丝绳与曳引轮槽的匹配、轮槽磨损、曳引轮与钢丝绳夹角三个角度确定牵引变化的原因;在设计值符合国家标准的情况下,因安装、操作、维护不当而增加牵引系数,并提出相关改进建议。基于此,本文提出基于机器视觉的电梯曳引轮打滑检测非接触式测量方法。在曳引轮边缘和钢丝绳上同一位置做一个白线标记,当电梯往返一圈后发生曳引轮打滑时,两个白线标记不匹配。然后,通过图像处理算法对原始图像的位错信息进行处理,得到电梯曳引轮的滑动,且通过系统测试研究滑点图像检测方法的误差。
1 曳引轮滑动检测检测方案
1.1 滑移检测方法
曳引轮与钢丝绳之间的位移发生在电梯往返运行过程中,基于机器视觉的电梯曳引轮滑移检测方法是通过标记获得曳引轮与钢丝绳在圆周方向上的位错图像,利用图像非线性几何变换和质心可以得到曳引轮与钢丝绳之间的滑移方法。(1)在曳引轮边沿与钢丝绳相对应的地方分别施以白色标记[4-5]。(2)为了获取滑点的图像,采用了图像处理算法,可以精确地计算出两个白色标记在圆周方向△y上的相对偏移距离。如果计算出的△值小于预先设定的最小偏移距离ε,那么可以认为这个标记是满足要求的;反之,如果△值大于或等于ε,那么这个标记就不符合标准要求,需要重新进行标记[6]。(3)在电梯的往返运行过程中,如果出现打滑现象,那么曳引轮边沿和钢丝绳上的白色标记就会发生错位。这时会使用位于曳引轮正上方的CCD 相机来收集这些标记的原始图像。
1.2 实验方案
摄像机通过铝型材支架直接放置在电梯曳引轮上方,调节摄像机的中心线,使其与曳引轮的中心轴线重合。需要摄像机收集在电梯往返后在曳引轮和钢丝绳上的白色标记之间检测到的打滑图像[7]。利用图像算法分析曳引轮的打滑情况。
实验硬件平台包括CCD 相机、镜头、白光LED光源、连接工业相机的30 mm 范围移动平台,以及电梯测试室,包括曳引轮、钢丝绳等配件。实验测试软件是在LabView8.5 中开发的,并结合Excel 软件进行数据分析。
2 滑移检测算法
2.1 图像的非线性几何变换
为了降低图像的冗余度,首先从原始图像中选定ROI(感兴趣区域)来获取ROI 图像,这样做能够有效减少算法的计算负担,从而提高处理速度。在选定ROI 的过程中,X轴方向上的范围应确保完整涵盖钢丝绳和曳引轮的边缘部分;而在Y轴方向上,选择应基于摄像机的主光轴作为对称中心,以确保图像的均衡性和准确性,并包括两个白色标记[8]。
图像坐标系的原点由原先的图像左上角迁移至图像的中心点,从而定义了新的ROI(感兴趣区域)图像坐标系。利用公式(1),将坐标系的原点移至点,Hc代表的是ROI(感兴趣区域)图像在X轴方向上的长度,Lc为Y轴方向的长度。(xa,ya)是ROI 图像中的坐标,(xb,yb)是是平移后的坐标。
当图像的坐标系统被调整至中心位置时,图像转换成为必要的步骤。图1 为非线性几何变换的基本原理。图中圆形代表曳引轮的正视投影,参照位置M为摄像机的主光轴所处的直线和ROI图像Y轴之间的交叉。对象图象JK、M在一个平面上,并与照相机透镜平行。通过摄像机的投射,将实际图象的圆弧HI转化成原图象FG。C点为原图上任一点,点D为原图的对应点,点E为原图的对应点。

图1 非线性几何变换示意图
线段EM的计算方法如式(2)所示,然后通过式(3)对整个ROI 图像进行变换。则可以得到目标图像的坐标(xc,yc)。
式中,R为曳引轮的半径。
(xb,yb)为平移后的像素坐标,(xc,yc)为目标图像中的像素坐标。y0是图像非线性几何变换反变换后ROI 图像中像素点对应的y坐标,y1和y2是与y0相邻整数部分的坐标,因此利用f(y0)填充灰度值。则利用式(4)和(5)可用来计算f(y0)。
式(4)可以简化为:
在经过线性插值法对灰度进行填充后,采用滑移检测的图像处理算法来对目标图像进行处理,需要通过式(6)将目标图像的坐标系原点调整到左上角的位置,用Hc和Lc来分别代表目标图像在X轴和Y轴上的长度。
2.2 滑动检测的图像处理算法
在对图像进行非线性几何变换后,ROI 图像已转化为等距离图像,其像素等效值也是一个固定值。两个标记之间的像素级距离可以通过图像处理算法获得。
由于环境和硬件因素的影响,采集到的图像含有高斯噪声。因此,利用非线性平滑滤波器中的中值滤波器去除噪声,可以很好地保留图像的细节信息。在测试中,白色被用作标记的颜色,主要因为白色和黑色之间有明显的对比。因此,标记与背景之间的灰度值差异很大,可以使用固定阈值法对图像进行二值化处理。二值化图像如图2(a)所示。

图2 处理后的图像
由于钢丝绳由绞合股组成,二值化后钢丝绳的亮部也会被处理成白色,但由于技术原因,区域较小,且相互之间不相连,两个白色标记的边缘毛刺较多。因此,本文选择形态学操作中的开放式方式来解决上述问题。采用5 × 10 结构元素的矩形结构来去除毛刺并隔离点。形态学操作后的图像如图2(b)所示。如图2(c)所示,面积最大的两个连接区域为标记区域。然后提取面积最大的两个连接区域,记为两个标记区域。
3 测试结果分析
3.1 现场测试
为了验证基于机器视觉的电梯曳引轮打滑检测方法的可行性和检测算法的性能,在搭建的实验平台上进行了电梯曳引轮打滑现场测试。测试选择的电梯参数如下:额定速度为95.5 r/min,曳引轮半径R为400 mm,吊笼重量为373 kg,最大运行高度为2400 mm。测试过程中,电梯空载运行一个来回作为一组测试实验记录,连续不间断地进行九组实验。每组实验收集三幅原始图像,共27 幅图像。对于每张原始图像,采用本文的检测方法得出滑移量。实验中,当像素当量k=0.86 mm,标记的初始偏差距离△y=1.2 mm 时,每组实验的滑移量由每组实验的三个检测结果的平均值得出。实验测试结果见表1,实验数据由Excel 软件处理。
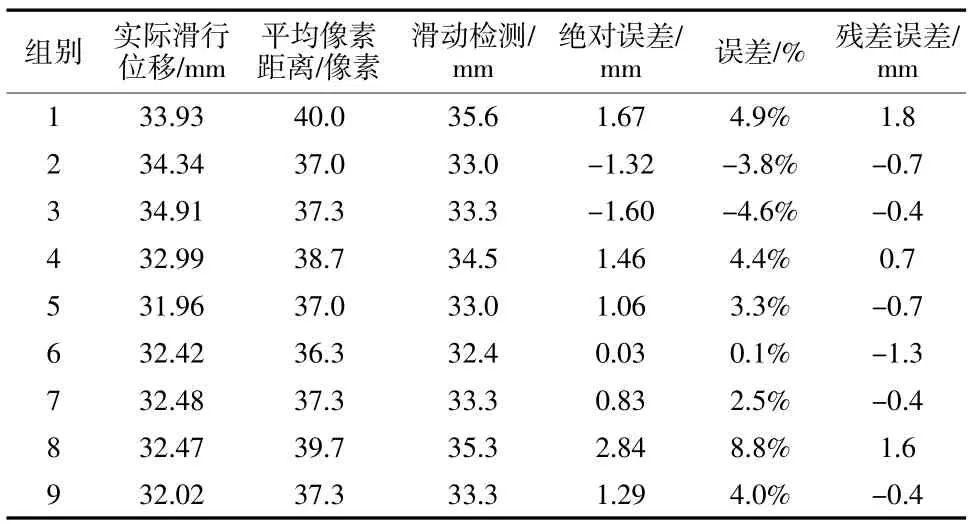
表1 测试结果
实验过程中,在电梯技术人员的配合下,通过对电梯控制柜的数据采集,获得了曳引轮驱动电动机的转角信息;将电动机参数与曳引轮半径相结合,得到了曳引轮的实际位移。因为升降机在经过一次回转之后,已经恢复到了原来的位置,所以钢索的移动位移是0,所以,在这个时候,曳引机的移动量就是滑动。电梯控制柜获得的滑移精度可达0.1 mm。但是,如果从电梯控制柜中获取曳引轮的滑移量,可能会造成电梯运行不安全的风险,不适合电梯维护人员现场检测。本文采用该方法获得了电梯滑移的真实值,为测试误差分析提供了基础。从表1 可看出,电梯每次往返产生的真实滑移量是不同的,平均值为33.06 mm,最大试验误差为8.8%,最小试验误差为0.1%。九组实验检测到的平均滑移值为33.8 mm。与实际滑移值相比,绝对误差约为0.74 mm,小于1 mm,相对误差为2%。
3.2 误差分析
设定测试次数重复n=9 次。采用格拉布斯标准来区分误差。由表1 可知,9 次测量的平均值为x¯=33.8 mm。由公式(7)得出标准偏差S=1.1 mm。根据公式(8),可以得到每个观测值的残差值。残差值的最大绝对值为1.8 mm,相应的观测值x=35.6 mm 即为可疑值xd。
取t分布公式中的p=99%=0.99,即α=1 -0.99=0.01,n=9,由t分布表可得G(0.01,9)=2.32,因为1.64 <2.32。因此,xd=35.6 mm 并非异常点,可以得出九组实验结果不存在严重误差。
4 结论
机器视觉技术检测电梯曳引轮打滑的新方法,是一种完全独立于电梯系统的非接触式测量。在曳引轮的边缘和钢丝绳的相同位置做了一个白色标记,原始图像由CCD 相机获取。对图像进行非线性几何变换后,对图像进行预处理。主要结论:电梯每次往返产生的真实滑移量是不同的,平均值为33.06 mm,最大试验误差为8.8%,最小试验误差为0.1%。九组实验检测到的平均滑移值为33.8 mm .与实际滑移值相比,绝对误差约为0.74 mm。