基于首尾冗余的列控车载设备测速测距系统
2024-05-01宁云转鲍鹏宇顾玲凤
宁云转,鲍鹏宇,刘 佳,王 成,顾玲凤
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
伴随着轨道交通行业的发展,列车安全控制技术的研究变得尤为重要,而列车安全控制系统的核心设备是列控车载设备。列控车载设备组成如图1所示。
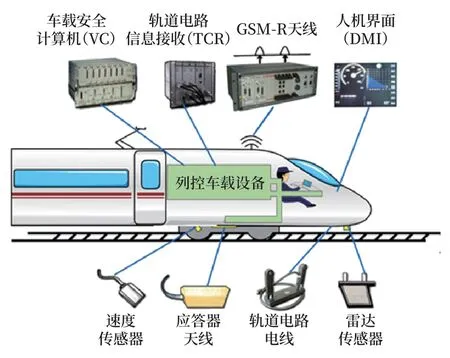
图1 车载设备组成Fig.1 Onboard equipment composition
测速测距系统是列控车载设备的重要组成部分和工作前提,它的主要任务是实时向车载主机提供列车的运行方向、速度、加速度、距离、传感器状态等信息。因此,测速测距系统的准确、稳定和安全地运行对列车安全控制至关重要。
常见的测速测距系统主要采用多传感器(如速度传感器、雷达传感器、加速度计、卫星等)融合的方式。现有技术中,为降低因测速测距系统故障导致的信号系统故障,提出了首尾冗余测速测距系统的安全冗余定位策略。处理方式是在列车的两端各安装一套测速测距系统,列车运行时,首端仅使用本端测速测距系统进行定位,尾端测速测距系统处于休眠状态,如果首端测速测距传感器失效,则切换到尾端进行测速测距,如果尾端传感器也失效,则列车测速测距失效。这种首尾独立冗余的测速测距系统不能充分利用两端传感器的信息,容易因两端传感器单点故障导致功能失效,一定程度上影响了列车测速测距系统和控制系统的可用性。本文从系统的角度提出基于多种传感器融合的首尾冗余的车载设备测速测距系统设计方案,既能有效地降低因单点故障导致的测速测距系统故障,又能避免因测速测距系统故障而导致的信号系统故障,从而实现车头、车尾测速测距系统的安全冗余。
2 首尾冗余的测速测距系统
2.1 测速测距系统结构
测速测距系统由X个主传感器(如速传)、Y个辅助传感器(如雷达、加速度计、卫星)、接口适配层和测速测距处理单元构成,其中X≥1,Y≥0且X+Y≥2。传感器测量到的数据通过接口层传递给测速测距处理单元,测速测距处理单元根据传感器协议进行数据缓存、数据计算、传感器故障分析以及数据融合,最终将测速测距结果输出,供主机软件使用。测速测距系统结构如图2 所示。
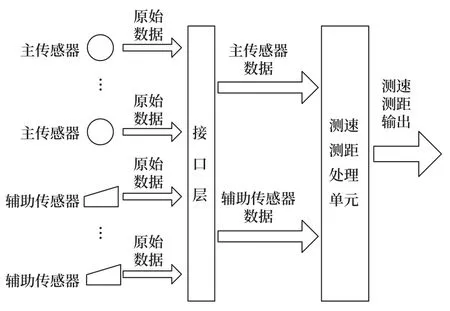
图2 测速测距系统结构Fig.2 Speed and distance measurement system structure
测速测距系统正常运行的条件是:至少存在两个有效运行的传感器,且其中至少一个为主传感器。若该条件不能满足,则判定测速测距系统失效。
2.2 首尾冗余的测速测距系统结构
列车首尾冗余测速测距系统是在列车首尾两端各设置一套测速测距系统,两套测速测距系统通过通信总线和数字信号相连接。每套测速测距系统具有相同结构和功能,能够各自独立运行,为列车提供测速测距信息,并能够通过通信总线实现信息交互(测速测距处理单元参与计算的数据以及融合后的速度、加速度、位置以及传感器状态),从而实现协同工作和切换首尾系统进行列车控制。
首尾冗余环境下,列车正常运行时,由首端的测速测距系统提供列车定位信息,尾端的测速测距系统处于备用状态。当首端测速测距系统内的某些功能故障时,测速测距系统会立刻切断故障功能的输出。如果故障功能影响测速测距系统正常运行,则切换到尾端测速测距系统相应功能,首端测速测距系统的故障功能进入备用状态。如果列车首尾两端测速测距系统因传感器故障导致各自均不满足系统正常运行条件,但两端传感器组合后可以满足测速测距系统正常运行条件,则可将两端测速测距系统正常传感器或数据共享,由控车端的测速测距系统计算,从而输出测速测距结果进行列车控制。测速测距系统完成切换后,列车仍可以相同的运行状态运行。首尾冗余的测速测距系统架构如图3 所示。
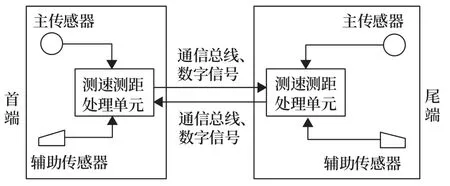
图3 首尾冗余的测速测距系统架构Fig.3 Speed and distance measurement system architecture based on head and tail redundancy
2.3 首尾冗余的测速测距系统切换规则
首尾冗余的测速测距系统,冗余切换需遵循以下规则:
1)如果首端测速测距系统满足正常运行条件,则由首端的测速测距系统为列车提供定位信息;
2)如果首端测速测距系统故障,尾端测速测距系统满足正常运行条件,则由尾端的测速测距系统为列车提供定位信息;
3)如果列车首尾两端测速测距系统均故障,但首尾测速测距系统组合后满足正常运行条件,则由首端测速测距系统将两端数据组合、计算后为列车提供定位信息;
4)如果列车两端的测速测距系统各自或组合后均不满足测速测距系统正常运行条件,则列车测速测距系统失效;
5)列车运行过程中,主传感器发生可容忍故障(如速传空转打滑)时,测速测距系统不进行首尾切换;
6)允许列车首尾冗余状态运行至回库,回库后需故障恢复方可再次投入运营。
列车出库前需进行首尾冗余功能检测,如发现该功能故障,则不启动首尾冗余功能。工作人员需进行ATP 重启或进一步检修,检测包含以下检测步骤中的一种或者多种:
1)检测测速测距系统的各个传感器是否能够正常工作;
2)检测首尾两端测速测距系统是否能够正常工作;
3)检测通信装置是否能够有效连接两端测速测距系统。
测速测距系统中的冗余切换控制模块在列车运行的整个周期中,包括从列车出库到运行至回库或进入故障应急状态。按照上述冗余切换规则,实时根据测速测距系统各个部件运行情况,调整测速测距系统的工作状态,具体如图4 所示。
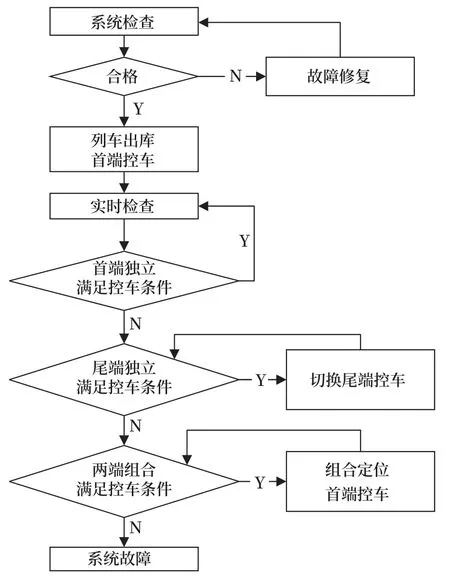
图4 测速测距系统冗余切换流程Fig.4 Flow chart of redundant switching of speed and distance measurement system
2.4 首尾冗余的测速测距系统优势
首尾冗余的测速测距系统具备以下优势:
1)在原有系统的基础上增加了首尾测速测距处理单元数据切换功能,降低设备成本,提高设备利用率;
2)首尾两端测速测距系统在列车运行时始终独立运行,车头测速测距系统功能故障时即刻切换至车尾,测速测距数据实时性好,既增强了列车控制功能的可用性,又提高列车运行效率;
3)列车两端测速测距系统均出现单一功能故障时,允许相互缺失功能弥补,提高了首尾冗余的可用性。
3 结语
本文提出的基于首尾冗余的测速测距系统架构,在不改变、不增加测速测距系统和传感器数量的前提下,通过将首尾两端测速测距处理单元的数据共享,使得列车运行时,车头测速测距系统在出现某些功能故障的情况下仍能正常运行。同时也解决了测速测距系统单一功能故障导致列车停止运行的问题,为列车控制系统提供了一套可靠性高、可用性强的列车测速测距方案。