库尔勒香梨无人机辅助授粉飞行作业参数优选
2024-04-29位杰蒋媛谢宏江
位杰 蒋媛 谢宏江

收稿日期:2023-07-18 接受日期:2023-11-14
基金項目:兵团财政科技计划项目(2021AB016);第二师铁门关市科技计划项目(2020NYGG01)
作者简介:位杰,男,副研究员,研究方向为果树栽培生理生态与遗传育种。E-mail:627weijie@sina.com
*通信作者 Author for correspondence. E-mail:360315184@qq.com
DOI:10.13925/j.cnki.gsxb.20230287
摘 要:【目的】无人机授粉技术因作业效率高、雾化效果好、成本低、可有效减少病害传播等优点,近几年不断得到重视与应用。探究无人机辅助授粉不同作业参数下雾滴在库尔勒香梨树冠层中的沉积分布规律,为精准、高效授粉提供指导。【方法】应用四旋翼无人机在库尔勒香梨盛花期开展不同飞行路线、喷液量、雾化粒径、飞行高度、飞行速度对雾滴沉积分布的影响研究,筛选最佳作业参数。【结果】无人机沿行上飞行时,雾滴密度、沉积量和覆盖率在树体上层到下层依次降低,而行间飞行时,上层最少,中下层较多,在同一冠层均低于行上飞行的雾滴密度、沉积量和覆盖率;随着喷液量的增加,树冠各层的雾滴密度、沉积量和覆盖率也随之升高;随雾化粒径的增大,雾滴密度在香梨树同一冠层整体上呈现出逐渐降低的趋势,相同粒径下,雾滴密度从上层到下层逐渐降低;同一飞行高度下,雾滴密度、沉积量和覆盖率在树体冠层从上到下依次递减,随飞行高度的升高,雾滴密度在各冠层呈先降后升的趋势,覆盖率和沉积量在树冠上层整体上呈现逐渐降低的趋势,在树冠中层和下层呈现先降后升的趋势;不同飞行速度下树冠上层的雾滴密度、沉积量和覆盖率无明显差异,在中层和下层,随飞行速度的升高,雾滴密度、沉积量和覆盖率逐渐下降。【结论】当无人机沿行上飞行、喷液量45 L×hm-2、雾化粒径100 μm、飞行高度离树冠顶部1 m、飞行速度3 m×s-1时效果较优。研究结果为无人机辅助授粉的田间作业参数设置提供参考,也为制定基于农用无人机的梨树辅助授粉作业技术规范提供依据。
关键词:库尔勒香梨;无人机;辅助授粉;作业参数;优选
中图分类号:S661.2 文献标志码:A 文章编号:1009-9980(2024)01-0162-12
Optimization of flight operation parameters for supplementary pollination in Kuerlexiangli pear using an unmanned aerial vehicle
WEI Jie, JIANG Yuan*, XIE Hongjiang
(Agricultural Scientific Institute of 2nd Division of Xinjiang Production and Construction Corps, Tiemenguan 841005, Xinjiang, China)
Abstract: 【Objective】 The self-pollination fruiting set rate of Kuerlexiangli pear was low, and in the production the artificially assisted pollination is needed in order to improve the yield and quality. However, the traditional method of hand-assisted pollination suffers from low efficiency and high cost. In recent years, with the rapid development of modern information technology and its widespread application in the field of agriculture, the technology of unmanned-aerial-vehicle (UAV) -assisted pollination has been widely applied due to its multiple advantages, such as high efficiency, high fogging effect, low cost and high disease blocking rate. To investigate the distribution pattern of droplets deposited on the canopy layer of Kuerlexiangli pear trees under different operating parameters of UAV-assisted pollination, the present experiment was undertaken to screen the optimal operational parameters, so as to improve the pollination quality and operational efficiency. 【Methods】 Five factors, including different flight routes (up-row flight and inter-row flight), spray volume (15 L×hm-2, 30 L×hm-2 and 45 L×hm-2), droplet size (70 μm, 100 μm, 130 μm and 170 μm), flight height (1 m, 2 m and 3 m from the top of the canopy), and flight speed (3 m×s-1, 5 m×s-1 and 7 m×s-1) were selected in this study. Three measurement indexes, including the droplet density, deposition volume and coverage rate, were analyzed during the blooming period of Kuerlexiangli pear. 【Results】 The droplet density, deposition volume and coverage rate decreased from the upper to lower layers on the trees when the UAV flew along the upper row. The droplet density was significantly different between the upper and lower layers, and the amount of deposition and coverage rate were not significantly different among the upper, middle and lower layers. In the inter-row flight, the droplet density, deposition volume and coverage rate on the upper layer were at the least leve and the three indexes on the same layer were lower than those in the up-row flight. The droplet density, deposition and coverage on all layers of the canopy increased with increasing spray volume. At a spray volume of 15 L×hm-2, there was no significant difference in droplet density, deposition and coverage between the upper and lower layers of the canopy, and at spray volumes of 30 L×hm-2 and 40 L×hm-2, droplet density and deposition decreased significantly from the upper to lower layers of the canopy, with progressively significant differences. With the increase of droplet size, droplet density showed a gradual decrease on the same tree canopy. In addition, with the same drop size, droplet density gradually decreased from the upper layer to the lower layer, and the deposition amount and coverage rate gradually decreased from the upper layer to the lower layer when the droplet size was 70 μm-130 μm. The deposition amount and coverage tended to increase sequentially from the upper layer to the lower layer when the droplet size was 170 μm, but the difference did not reach the significant level. As flight height increased, a significant difference in droplet density, deposition and coverage was only detected on the upper canpoy layer, but not on the middle and lower layers. At the same flight height, droplet density, deposition and coverage decreased from upper layer to lower layer of the tree canopy. In the upper canopy layer, there were no significant differences in droplet density, deposition and coverage at different flight speeds. Moreover, on the middle and lower layers, the three indexes gradually decreased with increasing flight speed. When the flight speed was 3 m×s-1, the droplet density, deposition amount and coverage rate showed a first decreasing and then increasing trend from the upper, middle and lower layers, but the differences did not reach a significant level. When the flight speed was 5 m×s-1, the droplet density, deposition amount and coverage rate showed a decreasing trend from the upper layer to the lower layer, the droplet density on the upper layer differed significantly from that on the lower layer, and the difference in the deposition amount and coverage rate was not significant among different layers. When the flight speed was 7 m×s-1, the droplet density, deposition amount and coverage rate showed a first decreasing and then increasing trend from the upper, middle and lower layers, the droplet density and coverage rate on the upper layer showed very significant differences on the middle and lower layers, and the deposition amount of the upper layer showed very significant differences with the middle layer and significant differences with the lower layer. There were no significant differences in droplet density, deposition amount and coverage between the middle and lower layers. 【Conclusion】 The comprehensive analysis suggested that the UAV was more effective when it flew along the top of the row, with a spray volume of 45 L×hm-2, a droplet size of 100 μm, a flight height of 1 m above the top of the canopy and a flight speed of 3 m×s-1. This paper provides technical reference for UAV-assisted pollination technology, and also provide theoretical basis for futher completing the relevant technical specifications.
Key words: Kuerlexiangli pear; Unmanned aerial vehicle; Supplementary pollination; Operation parameters; Optimization
库尔勒香梨(以下简称香梨)是新疆特色林果业的重要组成部分,在促进出口创汇、农业增效、果农增收和推进乡村振兴等方面发挥着重要的作用。香梨自花授粉结实率低,生产中常采用配置授粉树进行自然授粉以及人工授粉、蜜蜂授粉、液体喷雾授粉等辅助授粉方式促进坐果。目前生产上大多数果园存在授粉树数量配置少、品种配置不合理现象,导致授粉坐果效果不理想。人工授粉效果最佳,但是劳动强度大、花粉用量大、效率低、成本高,且关键时期存在劳动力不足现象。蜜蜂授粉效果好、效率高,但存在病害潜在传播的风险。液体喷雾授粉是一种新型的授粉方式,相比人工授粉,具有授粉速度快、节约人工的特点,且能增加柱头的水分和养分,延长柱头授粉受精时间,提高坐果率。但是目前液体喷雾授粉的机具还主要依靠背负式喷雾器,作业高度有限,在一定程度上仍然没有从根本上解决劳动强度大和作业效率低的问题。
随着现代信息技术的飞速发展及其在农业领域的普遍应用,传统农业不断向智慧农业、精准农业跨越转型,农用无人机受到了越来越广泛的关注与应用。一方面,无人机能搭载不同对地观测传感器快速无损地提取农作物长势[1]、产量估产[2]、养分监测[3]、病虫害监测[4]、农业灾害[5]、果树树冠信息[6]等农情信息,帮助农民及时掌握可靠的农田信息,便于按时按需进行精准作业管理;另一方面,无人机还能搭载喷洒系统、播撒系统进行航空施药、播种、授粉、施肥等农事操作,能适应不同的作业环境,有效减少农用机械对作物的损害及对土壤的反复碾压,提高作业效率和作业质量,减轻人员劳动强度,保护环境,有利于实现大面积、规模化生产[7-8]。
在梨树上,无人机授粉技术因其作业效率高、雾化效果好、成本低、有效减少病害传播等优点,在近几年不断得到重视与应用。羊坚等[9]对香梨无人机辅助液体授粉的最佳花粉液参数组合进行了探索,王士林等[10]对不同喷雾量下多旋翼无人机和背负式喷雾器喷雾授粉时梨树冠层内沉积雾滴的粒径和覆盖结果进行了对比分析,王璐等[11]对四旋翼无人机的飞行高度、每666.7 m2喷液量、飞行速度对雾滴在香梨花期冠层沉积分布的影响进行了研究。无人机机型、梨树树形不同,其作业参数也不完全相同,因此,根据无人机机型筛选适宜参数,对提高授粉效率、保证授粉质量具有重要意义。目前关于无人机香梨辅助授粉的研究较少,尚无统一的作业标准。一方面,无人机飞手常常参考航空喷药的参数为香梨树进行授粉;另一方面,不同无人机机型结构不同,所产生的风场也有很大差异,进而影响授粉效果。因此,研究花粉漂移实时跟踪系统,掌握花粉运动轨迹、运动趋势,根据花粉运动状况及时调整无人机飞行参数,对提高无人机授粉的作业效率和作业质量具有重要指导性意义。笔者在本研究中以当前植保无人机主流机型极飞?P100 2022款四旋翼农业无人机为研究对象,研究不同授粉参数条件下雾滴分布特征,筛选最优的授粉参数,为无人机辅助授粉的田间作业参数设置提供参考,也为制定基于农用无人机的梨树辅助授粉作业技术规范提供依据。
1 材料和方法
1.1 材料
试验园位于新疆铁门关市博古其镇湖心村(86°02′40″ E,41°47′50″ N),面积2.0 hm2。试验材料为香梨,树龄10 a(年),株行距1 m×4 m,东西行向。树形为纺锤形,树高3.5 m。
试验用无人机为广州极飞科技有限公司生产的极飞?P100 2022款电动四旋翼农业无人飞机,载机平台型号3WWDZ-40A,药液箱额定容量40 L,雾化粒径60~400 μm,喷幅5~10 m(视飞行高度、每666.7 m2用量、环境等而定),最大飞行速度13.8 m×s-1,最大飞行高度30 m,最大飞行距离2000 m。
供试水敏纸为重庆六六山下植保科技有限公司生产,规格为35 mm×110 mm(宽×长)。
供试花粉母液采用齐开杰等[12]的配方配置,含有蔗糖、硝酸钙、硼酸、黄原胶等物质。
1.2 方法
试验于2022年4月7日上午9:00开始,时值香梨树盛花期(花开50%)。环境风速0.6 m×s-1,温度22.3 ℃。将供试香梨树冠层分为上(>2.5~3.5 m)、中(>1.6~2.5 m)、下(0.7~1.6 m)三层,东、南、西、北4个方位,每个处理选取5株树。根据每层冠幅及方位,在距离中心干每隔30 cm处放置一张水敏纸,用于接收冠层不同区域内的沉降雾滴。待喷雾完成且雾滴充分干燥后及时取下水敏纸装入干燥的信封袋中保存,在实验室使用扫描仪进行灰度扫描(分辨率600×600),采用六六山下雾滴分析软件(重庆六六山下植保科技有限公司)对水敏纸进行分析。采用框选区域、区域提取、前景背景像素调节、剥离、区域雾滴反选和区域筛除的方法获得雾滴密度、覆盖率和沉积量参数。
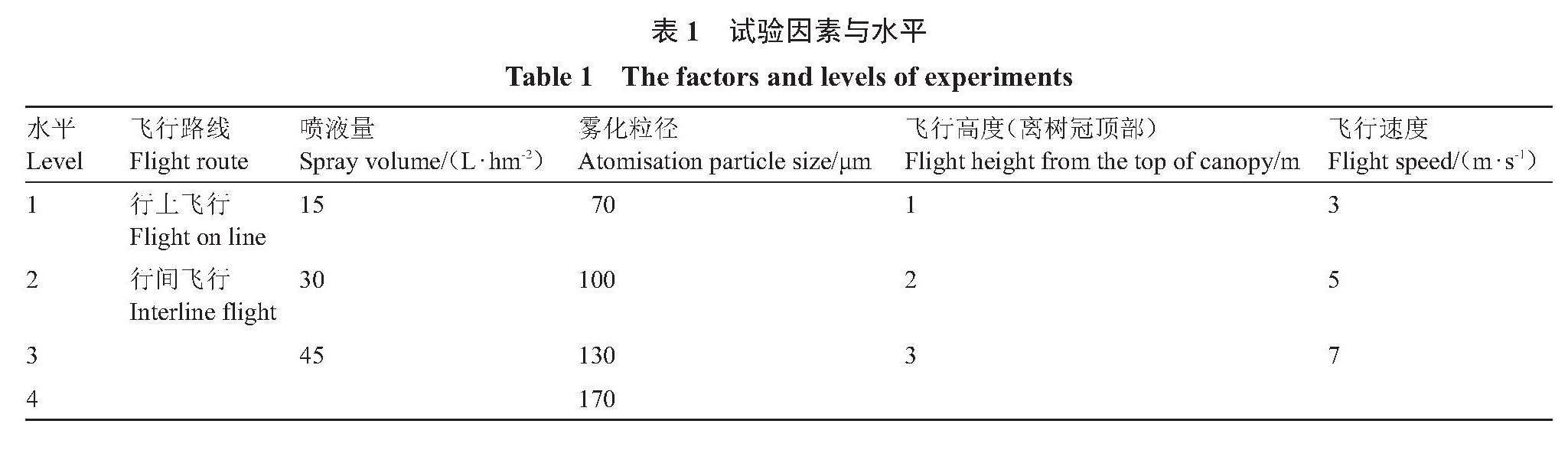
采用控制变量法设置单因素试验。以不同飞行路线、不同喷液量、不同雾化粒径、不同飞行高度、不同飞行速度为影响因素,共计15组试验(表1),筛选无人机辅助授粉的最佳作业参数。
1.3 数据分析
试验数据采用Excel进行数据整理和绘图,采用SPSS 19.0软件进行方差分析及Duncan新复极差法多重比较。
2 结果与分析
2.1 飞行路线对雾滴沉积分布的影响
由图1可知,无人机沿香梨树行上飞行时,树体相同冠层的雾滴密度、沉积量、覆盖率均高于沿行间飞行时的雾滴密度、沉积量、覆盖率。其中,行上飞行时树冠上层的雾滴密度、沉积量、覆盖率均显著高于沿行间飞行时,而中层和下层均未达到显著性差异。
无人机沿香梨树行上飞行时,雾滴密度、沉积量、覆盖率表现为上层>中层>下层,上层与下层的雾滴密度呈显著差异,沉积量、覆盖率在上、中、下三层之间无显著差异。无人机沿香梨树行间飞行时,雾滴密度、沉积量、覆盖率表现为中层>下层>上层,但差异均未达到显著水平。
综合无人机不同飞行路线下香梨树相同冠层和相同飞行路线下不同冠层的雾滴沉积分布情况,实际作业时无人机沿香梨树行上飞行效果较好,此时雾滴密度、沉积量、覆盖率在树冠各层的沉积分布均高于行间飞行。
2.2 喷液量对雾滴分布的影响
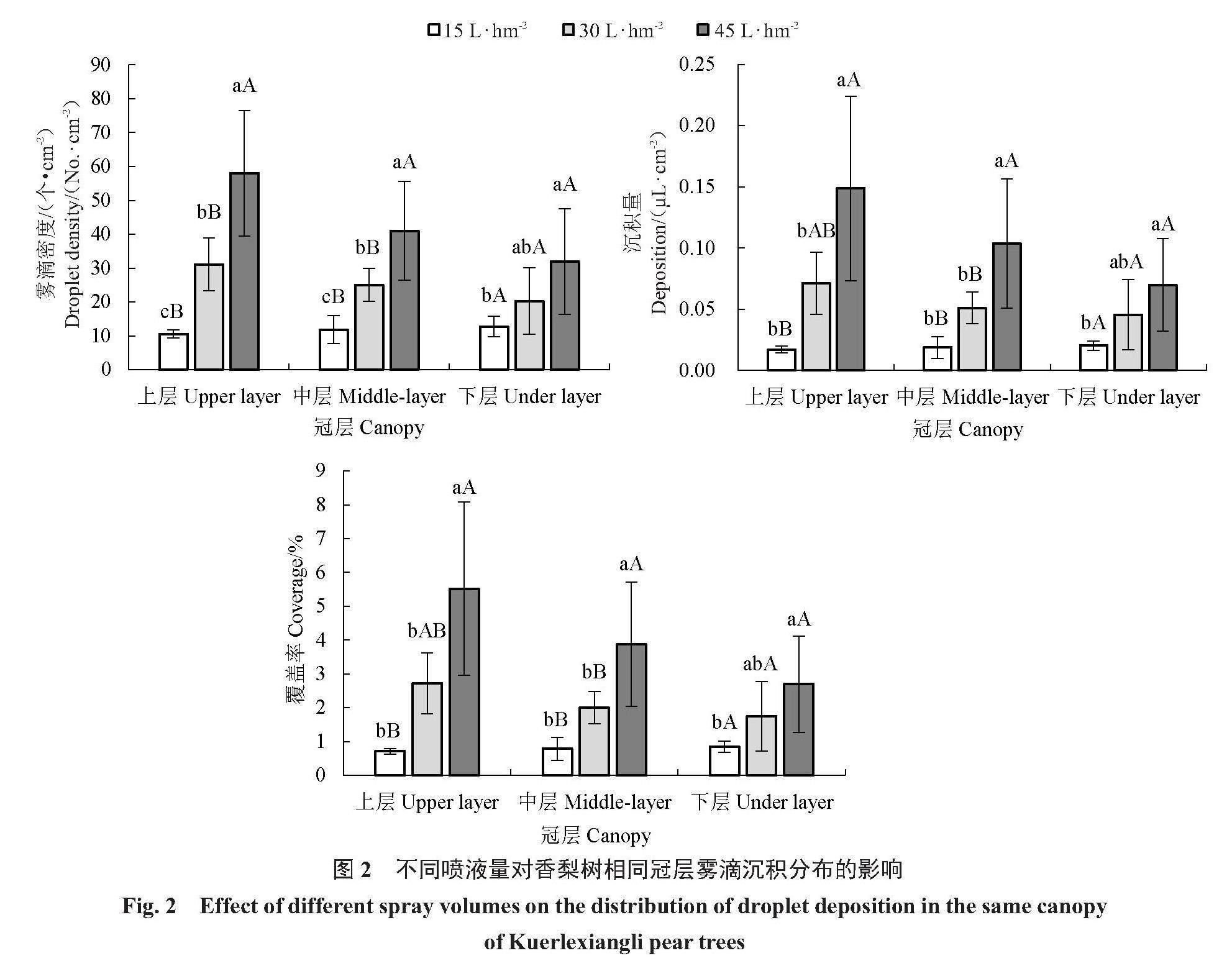
由图2可知,在香梨树冠各层,随着喷液量的增加,雾滴密度、沉积量、覆盖率也逐渐增大。
在树冠上层和中层,45 L×hm-2的喷液量与30 L×hm-2、15 L×hm-2喷液量的雾滴密度呈极显著差异,30 L×hm-2与15 L×hm-2喷液量的雾滴密度呈显著差异。在树冠下层,45 L×hm-2的喷液量与15 L×hm-2喷液量的雾滴密度呈显著差异,30 L×hm-2与15 L×hm-2喷液量的雾滴密度无显著差异。
在树冠上层,45 L×hm-2的喷液量的沉积量、覆盖率显著高于30 L×hm-2和15 L×hm-2喷液量,且与15 L×hm-2喷液量呈极显著差异,30 L×hm-2与15 L×hm-2喷液量的沉积量和覆盖率则无显著差异。在树冠中层,45 L×hm-2的喷液量的沉积量、覆盖率极显著高于30 L×hm-2和15 L×hm-2喷液量,30 L×hm-2与15 L×hm-2喷液量的沉积量和覆盖率则无显著差异。在树冠下层,45 L×hm-2的喷液量的沉积量、覆盖率显著高于15 L×hm-2喷液量,30 L×hm-2与15 L×hm-2喷液量的沉积量和覆盖率则无显著差异。
当喷液量为15 L×hm-2时,雾滴密度、沉积量、覆盖率从树冠上层到下层逐渐增大,但均未达显著差异水平。当喷液量为30 L×hm-2、45 L×hm-2时,雾滴密度、沉积量、覆盖率从树冠上层到下层逐渐降低,雾滴密度在30 L×hm-2、45 L×hm-2的喷液量下上层与下层差异显著,沉积量和覆盖率在45 L×hm-2的喷液量下上层与下层差异显著。
综合不同喷液量下香梨树相同冠层和相同喷液量下不同冠层之间雾滴的沉积分布结果,实际作业时无人机喷液量为45 L×hm-2时效果最好,此时雾滴密度、沉积量、覆盖率在树冠各层的沉积分布均高于喷液量为15 L×hm-2和30 L×hm-2的处理。
2.3 雾化粒径对雾滴分布的影响
由图3可知,在香梨树同一冠层,随雾化粒径的增大,雾滴密度整体上呈现出逐渐降低的趋势。在树冠上层,雾化粒径70 μm时的雾滴密度与其他雾化粒径呈极显著差异,雾化粒径100 μm时的雾滴密度与雾化粒径170 μm呈显著差异;在树冠中层,雾化粒径70 μm时的雾滴密度与雾化粒径130 μm、170 μm呈极显著差异,雾化粒径100 μm时的雾滴密度与雾化粒径170 μm呈显著差异;在树冠下层,雾化粒径100 μm时的雾滴密度与雾化粒径130 μm呈显著差异,与雾化粒径170 μm呈极显著差异,雾化粒径70 μm时的雾滴密度与雾化粒径170 μm呈显著差异。
随雾化粒径的增大,沉积量在树冠上层呈现逐渐降低的趋势,雾化粒径70 μm时的沉积量与雾化粒径130 μm和170 μm的差异显著,且与170 μm的差异极显著,其他粒径之间无显著差异;不同粒径的沉积量在树冠中层无显著差异;在树冠下层,雾化粒径70 μm时的沉积量显著低于雾化粒径100 μm和170 μm的沉积量。
随雾化粒径的增大,覆盖率在树冠上层、中层呈现逐渐降低的趋势,雾化粒径70 μm的覆盖率与其他粒径差异显著,且与雾化粒径130 μm和170 μm的差异极显著,其他粒径间差异不显著;不同粒径的覆盖率在树冠中层无明显差异;在树冠下层,雾化粒径100 μm时的覆盖率显著高于雾化粒径70 μm和130 μm,其他粒径间差异不显著。
在相同的雾化粒径下,雾滴密度从树冠上层到下层呈依次递减的趋势。雾化粒径70 μm时树冠上层雾滴密度与中层差异显著,与下层差异极显著,中层与下层差异显著;雾化粒径100 μm时树冠上层的雾滴密度与下层差异显著,中层与下层无显著差异;雾化粒径130 μm和170 μm时雾滴密度在树冠各层之间均无显著差异。
雾化粒径在70 μm、100 μm和130 μm时,沉积量和覆盖率从树冠上层到下层呈依次递减的趋势,雾化粒径70 μm时树冠上层的沉积量和覆盖率与中层、下层差异极显著,其他差异不显著。雾化粒径170 μm时,沉积量和覆盖率从上层到下层呈依次增加的趋势,但差异未达显著水平。
综合不同雾化粒径下香梨树相同冠层和相同雾化粒径下不同冠层之间雾滴的沉积分布结果,考虑到实际作业时雾化粒径70 μm易受高温蒸发和风力影响,因此,雾化粒径为100 μm时效果较好。
2.4 飞行高度对雾滴分布的影响
由图4可知,雾滴密度在各冠层随飞行高度的增加呈现先降后升的趋势,覆盖率和沉积量在树冠上层随飞行高度的增加整体上呈逐渐降低的趋势,在树冠中层和下层随飞行高度的增加呈现先降后升的趋势。飞行高度离树冠顶部1 m与离树冠顶部2 m、3 m的雾滴密度、沉积量和覆盖率在树冠上层差异极显著,中层和下层的各处理之间均无显著差异。
相同飞行高度下,雾滴密度、沉积量和覆盖率从树冠上层到下层呈依次递减的趋势。飞行高度离树冠顶部1 m时,上层的雾滴密度、沉积量、覆盖率与中层、下层差异显著,而中层和下层之间并无显著差异;飞行高度离树冠顶部2 m时,上层的雾滴密度与下层差异显著,中层和下层无显著差异,沉积量和覆盖率在各层之间均无显著差异;飞行高度离树冠顶部3 m时,雾滴密度、沉积量、覆盖率在各层之间无显著差异。
综合不同飞行高度下香梨树相同冠层和相同飞行高度下不同冠层之间雾滴的沉积分布结果,实际作业时以离树冠顶部1 m效果较好,此时雾滴密度、沉积量、覆盖率的沉积分布均高于离树冠顶部1 m和2 m的处理。
2.5 飞行速度对雾滴分布的影响
由图5可知,雾滴密度、沉积量和覆盖率在树冠上层随飞行速度的增加没有显著差异,在树冠中层和下层表现出随飞行速度的增加而逐渐降低的趋势。在树冠中层,飞行速度3 m×s-1的雾滴密度、沉积量和覆盖率显著高于7 m×s-1;在树冠下层,飞行速度3 m×s-1的雾滴密度显著高于5 m×s-1,极显著高于7 m×s-1;沉积量在不同飞行速度之间无显著差异;飞行速度3 m×s-1的覆盖率显著高于7 m×s-1。
飞行速度为3 m×s-1时,雾滴密度、沉积量和覆盖率在上、中、下三层之间呈现先降后升的趋势,但差异均未达到显著水平。飞行速度为5 m×s-1时,雾滴密度、沉积量和覆盖率从上层到下层呈现依次降低的趋势,上层的雾滴密度与下层差异显著,沉积量和覆盖率在各层间差异不显著。飞行速度为7 m×s-1时,雾滴密度、沉积量和覆盖率在上、中、下三层之间呈现先降后升的趋势,上层的雾滴密度、覆盖率与中层和下层呈极显著差异,上层的沉积量与中层差异极显著,与下层差异显著。中层与下层的雾滴密度、沉积量、覆盖率均无显著差异。
综合不同飞行速度下香梨树相同冠层和相同飞行速度下不同冠层之间雾滴的沉积分布结果,实际作业时以飞行速度3 m×s-1效果较好,此时雾滴密度、沉积量、覆盖率的沉积分布总体上均高于5 m×s-1和7 m×s-1的处理。
3 讨 论
无人机授粉具有高效率、快速精准、操作便捷等特点,能够实现对指定地块不同部位的精准作业,且不受时间限制,在夜晚及能见度低时也可进行作业[13]。刘爱民等[14]利用无人机给水稻授粉,发现相对于人工授粉,无人机授粉的工作效率高、对植物的损害小,在水稻育种方面具有较大的发展潜力。在无人机实际田间作业时,雾滴的漂移、沉积、穿透等特性受无人机机型结构、飞行路线、环境风速、植物种类、树形、作业参数等多种因素影响,各因素之间也存在着交互作用。无人机机型结构不同,旋翼所产生的气流到达植物冠层后所产生的风场也不相同,风场的覆盖宽度、风场内各个方向的风速、风向以及风场的分布规律都直接影响花粉到达柱头的作业效果。
李继宇等[15-16]对水稻辅助授粉的研究发现,在水稻冠层内所形成风场的峰值风速主要受无人机的飞行速度、飞机与负载质量、飞行高度的影响,不同机型的最优作业参数也不相同。蒙艳华等[17-18]的研究认为,主干形梨树和Y字形梨树在采用单旋翼无人机进行喷雾作业时,沿种植行以果树为中心航线,飞行高度距离冠层顶部2 m、飞行速度以2~3 m×s-1范围内为宜。王璐等[11]采用四旋翼无人机进行了飞行高度、每666.7 m2喷液量、飞行速度对雾滴在香梨花期冠层沉积分布的影响试验,结果表明飞行高度1.5 m、喷液量4.0 L×666.7 m-2、飞行速度3.0 m×s-1下雾滴沉积密度和均匀性较优,影响雾滴沉积密度的主要因素依次是每666.7 m2喷液量、飞行高度、飞行速度。陈盛德等[19]对雾滴沉积密度和雾滴沉积均匀性的研究结果指出,在橘树上较佳的作业参数是喷头流量1.0 L×min-1、作业高度2.5 m、作业速度4 m×s-1。影响雾滴沉积密度的主次顺序依次为作业速度、作业高度、喷头流量,影响雾滴沉积穿透性的因素主次顺序为作业高度、作业速度、喷头流量。刘琪等[20]在苹果树上的研究表明飞行高度2 m、飞行速度1 m×s-1、喷洒系统中4个喷头位于交叉角度为90°的十字形喷杆上且距离交叉点均为105 cm时,雾滴在苹果树上的沉积较好。笔者在本研究中得出的结果与以上研究结果既有相似之处也有不同之处,可能是无人机机型不同、参数范围和参数值的设定不同、选取的关键影响因素也不完全相同,参数之间也会存在交互影响作用,因此,作业参数也不完全相同。
3.1 飞行航线对雾滴沉积分布的影响
无人机飞行航线不同,其雾滴沉积分布情况也不同。蒙艳华等[18]在Y字形丰水梨上的研究结果表明,无人机实行“Y间飞”时,不同冠层位置及不同飞行速度的雾滴沉积密度比“行间飞”时差异更小,分布更为均匀。笔者在本研究中得出的结果与其相一致。当无人机沿行上飞行时,雾滴密度、沉积量和覆盖率在树体上层到下层依次降低,而行间飞行时,上层最少,中下层较多,在同一层均低于行上飞行的雾滴密度、沉积量和覆盖率(图1),这可能是部分雾滴飘移到行间空地上造成冠层内截留量少。因此,授粉作业时应选择行上飞行,最大程度地减少雾滴飘移损失,提高授粉效率。
3.2 喷液量对雾滴沉积分布的影响
在相同作业参数条件下,喷液量越大,单位面积内雾滴的沉积分布越好,柱头接受花粉的概率就越大。何玲等[21]对雾滴在水稻冠层沉积分布的研究表明,增加施液量可以显著提高雾滴的沉积密度,添加喷雾助剂可以显著提高雾滴沉积量及有效沉积率。本研究结果也表明,随着喷液量的增加,树冠各层的雾滴密度、沉积量和覆盖率也随之提升。当喷液量为15 L×hm-2时,雾滴密度、沉积量、覆盖率从树冠上层到下层无显著差异,当喷液量为30 L×hm-2、45 L×hm-2时,雾滴密度、沉积量、覆盖率从树冠上层到下层明显降低,差异逐渐显著。因此,授粉作业时宜选择45 L×hm-2及以上的喷液量。
3.3 雾化粒径对雾滴沉积分布的影响
雾化粒径与雾滴覆盖密度、喷液量有着十分密切的关系。随着雾化粒径的减小,雾滴数目呈几何级数增加,而随着雾滴数量的增加,柱头接受花粉的概率会显著增加,覆盖率也会更加均匀。李继宇等[22]研究发现,喷雾粒径显著影响雾滴在靶标上的沉积量,单位面积药液沉积量具有随雾滴粒径减小而增大的趋势,雾滴粒径越小,单位面积药液沉积量越大,分布均匀性越好。本研究结果表明,随雾化粒径的增大,雾滴密度在香梨树同一冠层整体上呈现出逐渐降低的趋势,在相同雾化粒径下,雾滴密度从上层到下层逐渐降低,雾化粒径在70~130 μm时,沉积量和覆盖率从上层到下层逐渐降低(图3)。粒径大的雾滴易沉降,不易随风飘移或蒸发散失,但是分布不均匀、附着能力差,而雾化粒径小,覆盖密度好、附着能力强,但容易受气流影响而发生飘移和受高温影响蒸发散失,需要找到一个合适的平衡点以充分发挥粒径大小所带来的优势。因此,综合考虑不同粒径的雾滴沉积分布结果和粒径大小的优缺点,在实际授粉操作时宜选择雾化粒径100 μm。
3.4 飞行高度对雾滴沉积分布的影响
无人机飞行高度越高,雾滴沉降的路程越长,喷幅越宽,雾滴飞行飘移性越强,穿透力越弱,同时也会造成蒸发量加剧。陶波等[23]研究认为,飞行高度、飞行速度、喷液流量、空气湿度和温度、风速与雾滴沉积分布呈正相关。高军等[24]的研究则表明,雾滴数量和覆盖率与飞行速度、飞行高度均呈负相关。刘海明[25]的研究也发现雾滴的沉积覆盖随无人机飞行高度的升高而降低。笔者在本研究中发现,在同一飞行高度下,雾滴密度、沉积量和覆盖率在树体冠层从上到下依次递减。随飞行高度的升高,相同冠层的雾滴密度、沉积量和覆盖率下降,树冠上层差异显著,中层和下层差异不明显,这与高军等[24]、刘海明[25]的研究结果相一致。飞行高度太低,影响无人机的安全性,同时无人机风场也可能会对花柱头造成一定影响。因此,在实际授粉操作时宜选择离树冠顶部1 m高度。
3.5 飞行速度对雾滴沉积分布的影响
无人机作业速度会直接影响雾滴的穿透性和飘移性。随着作业速度的增加,作业效率也相应提高,但是雾滴穿透性会降低,植保无人机螺旋桨将无法形成良好的下压穿透力,无法保障雾滴到达靶标,飘移距离也会相应增加,导致雾滴在作物中下部的沉积减少。陈盛德等[26]的相关研究结果表明,雾滴沉积量与飞行速度显著相关,随着飞行速度的增加,雾滴沉积量在逐渐下降,同时也会受外界风场的影响。王昌陵等[27]研究指出,为避免下洗气流场作用减弱而导致雾滴损失,在植保无人机作业时飞行速度不应设置超过6 m×s-1。本研究结果显示,在不同飞行速度下树冠上层的雾滴密度、沉积量和覆盖率无明显差异,在中层和下层,随飞行速度的升高,雾滴密度、沉积量和覆盖率逐渐下降。在飞行速度3 m×s-1时,雾滴密度、沉积量和覆盖率在各层间无差异,随飞行速度的增大,雾滴密度、沉积量和覆盖率在各层间的差异也显著增大(图5)。飞行速度越低,雾滴沉降效果越好,但是授粉效率会随之降低,授粉成本增加。因此,综合考虑授粉效率和授粉成本,在实际授粉操作时宜选择3 m×s-1的飞行速度。
笔者在本研究中筛选的库尔勒香梨无人机辅助授粉作业参数适用于纺锤形树形,在新疆梨产区还有疏散分层形、开心形等树形,不同树形的冠幅和高度也不相同,不同树形的最优作业参数有待进一步研究。在利用无人机为香梨进行辅助授粉作业时,为进一步提高授粉作业效率和作业质量,一方面要通过选择最优的飞行作业参数,最大程度地减少雾滴的飘移损失和蒸发损耗,另一方面还需要选择适宜的天气条件、高活性的花粉母液配比,此外还要注重喷雾助剂的使用,以提高雾滴在柱头上的黏附力,从而提高授粉效率。
4 结 论
应用极飞?P100 2022款四旋翼农业无人机在纺锤形香梨盛花期进行辅助授粉作业,研究飞行航线、喷液量、雾化粒径、飞行高度、飞行速度对雾滴密度、沉积量和覆盖率在树体冠层沉积分布的影响,结果表明,当无人机沿行上飞行、喷液量45 L×hm-2、雾化粒径100 μm、飞行高度离树冠顶部1 m、飞行速度3 m×s-1时效果较优。
参考文献 References:
[1] 王庆,车荧璞,柴宏红,邵科,于超,李保国,马韫韬. 基于无人机影像的冠层光谱和结构特征监测甜菜长势[J]. 农业工程学报,2021,37(20):90-98.
WANG Qing,CHE Yingpu,CHAI Honghong,SHAO Ke,YU Chao,LI Baoguo,MA Yuntao. Monitoring of sugar beet growth using canopy spectrum and structural characteristics with UAV images[J]. Transactions of the Chinese Society of Agricultural Engineering,2021,37(20):90-98.
[2] 严恩萍,棘玉,尹显明,莫登奎. 基于无人机影像自动检测冠层果的油茶快速估产方法[J]. 农业工程学报,2021,37(16):39-46.
YAN Enping,JI Yu,YIN Xianming,MO Dengkui. Rapid estimation of camellia oleifera yield based on automatic detection of canopy fruits using UAV images[J]. Transactions of the Chinese Society of Agricultural Engineering,2021,37(16):39-46.
[3] 王玉娜,李粉玲,王伟东,陈晓凯,常庆瑞. 基于无人机高光谱的冬小麦氮素营养监测[J]. 农业工程学报,2020,36(22):31-39.
WANG Yuna,LI Fenling,WANG Weidong,CHEN Xiaokai,CHANG Qingrui. Monitoring of winter wheat nitrogen nutrition based on UAV hyperspectral images[J]. Transactions of the Chinese Society of Agricultural Engineering,2020,36(22):31-39.
[4] 苏宝峰,刘昱麟,黄彦川,蔚睿,曹晓峰,韩德俊. 群体小麦条锈病发病动态无人机遥感监测方法[J]. 农业工程学报,2021,37(23):127-135.
SU Baofeng,LIU Yulin,HUANG Yanchuan,YU Rui,CAO Xiaofeng,HAN Dejun. Analysis for stripe rust dynamics in wheat population using UAV remote sensing[J]. Transactions of the Chinese Society of Agricultural Engineering,2021,37(23):127-135.
[5] 赵静,闫春雨,杨东建,温昱婷,黎文华,鲁力群,兰玉彬. 基于无人机多光谱遥感的台风灾后玉米倒伏信息提取[J]. 农业工程学报,2021,37(24):56-64.
ZHAO Jing,YAN Chunyu,YANG Dongjian,WEN Yuting,LI Wenhua,LU Liqun,LAN Yubin. Extraction of maize lodging information after typhoon based on UAV multispectral remote sensing[J]. Transactions of the Chinese Society of Agricultural Engineering,2021,37(24):56-64.
[6] 束美艳,李世林,魏家玺,车荧璞,李保国,马韫韬. 基于无人机平台的柑橘树冠信息提取[J]. 农业工程学报,2021,37(1):68-76.
SHU Meiyan,LI Shilin,WEI Jiaxi,CHE Yingpu,LI Baoguo,MA Yuntao. Extraction of citrus crown parameters using UAV platform[J]. Transactions of the Chinese Society of Agricultural Engineering,2021,37(1):68-76.
[7] 王磊,周建平,许燕,李志磊,张斌. 农用无人机的应用现状与展望[J]. 农药,2019,58(9):625-630.
WANG Lei,ZHOU Jianping,XU Yan,LI Zhilei,ZHANG Bin. Application status and prospect of agricultural UAV[J]. Agrochemicals,2019,58(9):625-630.
[8] 亓文哲,王菲菲,孟臻,张典利,王红艳,乔康,姬晓雪. 我国植保无人机应用现状[J]. 农药,2018,57(4):247-254.
QI Wenzhe,WANG Feifei,MENG Zhen,ZHANG Dianli,WANG Hongyan,QIAO Kang,JI Xiaoxue. Application status of unmanned aerial vehicle for plant protection in China[J]. Agrochemicals,2018,57(4):247-254.
[9] 羊坚,杨慧鹏,谢伟,郝海婷,冯宏祖,王兰. 库尔勒香梨无人机辅助液体授粉花粉液参数优选及经济效益分析[J]. 果树学报,2021,38(10):1691-1698.
YANG Jian,YANG Huipeng,XIE Wei,HAO Haiting,FENG Hongzu,WANG Lan. Parameter optimization and economic analysis of unmanned aerial vehicle (UAV) assisted liquid pollination for Kuerlexiangli pear[J]. Journal of Fruit Science,2021,38(10):1691-1698.
[10] 王士林,雷哓晖,唐玉新,常有宏,吕晓兰. 基于多旋翼无人机的梨树喷雾授粉技术[J]. 江苏农业科学,2020,48(23):210-214.
WANG Shilin,LEI Xiaohui,TANG Yuxin,CHANG Youhong,L? Xiaolan. Spray pollination technology of pear tree based on multi-rotor UAV[J]. Jiangsu Agricultural Sciences,2020,48(23):210-214.
[11] 王璐,吉光鹏,宋伟,牛蛉磊,张栋海,赵思峰. 无人机喷雾参数对雾滴在香梨花期冠层沉积分布的影响[J]. 农业科技通讯,2022(6):175-179.
WANG Lu,JI Guangpeng,SONG Wei,NIU Linglei,ZHANG Donghai,ZHAO Sifeng. Effect of drone spray parameters on the distribution of droplet deposition in the canopy of Korla fragrant pear during flowering[J]. Bulletin of Agricultural Science and Technology,2022(6):175-179.
[12] 齐开杰,陶书田,吴巨友,张绍铃. 梨树省力化液体授粉技术[J]. 中国南方果树,2017,46(3):168-169.
QI Kaijie,TAO Shutian,WU Juyou,ZHANG Shaoling. Labor-saving liquid pollination techniques for pear trees[J]. South China Fruits,2017,46(3):168-169.
[13] 郭梦,张传辉. 植保无人机授粉技术在库尔勒香梨中的应用[J]. 现代农业科技,2021(5):89-91.
GUO Meng,ZHANG Chuanhui. Application of plant protection UAV pollination technology in Korla pear[J]. Modern Agricultural Science and Technology,2021(5):89-91.
[14] 刘爱民,张海清,廖翠猛,张青,肖层林,何菊英,张健勇,何研,李继宇,罗锡文. 单旋翼农用无人机辅助杂交水稻制种授粉效果研究[J]. 杂交水稻,2016,31(6):19-23.
LIU Aimin,ZHANG Haiqing,LIAO Cuimeng,ZHANG Qing,XIAO Cenglin,HE Juying,ZHANG Jianyong,HE Yan,LI Jiyu,LUO Xiwen. Effects of supplementary pollination by single-rotor agricultural unmanned aerial vehicle in hybrid rice seed production[J]. Hybrid Rice,2016,31(6):19-23.
[15] 李继宇,周志艳,胡炼,臧英,闫梦璐,刘爱民,罗锡文,张铁民. 单旋翼电动无人直升机辅助授粉作业参数优选[J]. 农业工程学报,2014,30(10):10-17.
LI Jiyu,ZHOU Zhiyan,HU Lian,ZANG Ying,YAN Menglu,LIU Aimin,LUO Xiwen,ZHANG Tiemin. Optimization of operation parameters for supplementary pollination in hybrid rice breeding using uniaxial single-rotor electric unmanned helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering,2014,30(10):10-17.
[16] 李继宇,周志艳,胡炼,臧英,徐赛,刘爱民,罗锡文,张铁民. 圆形多轴多旋翼电动无人机辅助授粉作业参数优选[J]. 农业工程学报,2014,30(11):1-9.
LI Jiyu,ZHOU Zhiyan,HU Lian,ZANG Ying,XU Sai,LIU Aimin,LUO Xiwen,ZHANG Tiemin. Optimization of operation parameters for supplementary pollination in hybrid rice breeding using round multi-axis multi-rotor electric unmanned helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering,2014,30(11):1-9.
[17] 蒙艳华,王美美,姚伟祥. 植保无人飞机飞行速度对主干形果树喷雾作业效果的影响[J]. 中国南方果树,2021,50(1):96-99.
MENG Yanhua,WANG Meimei,YAO Weixiang. Effect of flight speed on spraying efficiency of drones on main trunk-shaped fruit tree[J]. South China Fruits,2021,50(1):96-99.
[18] 蒙艳华,王美美,姚伟祥. Y字树形梨园植保无人飞机不同飞行路径雾滴沉积分布研究[J]. 中国南方果树,2020,49(6):116-120.
MENG Yanhua,WANG Meimei,YAO Weixiang. Droplet distribution of two flight modes of unmanned aerial vehicle (UAV) on the orchard of Y-shaped pear trees[J]. South China Fruits,2020,49(6):116-120.
[19] 陈盛德,兰玉彬,周志艳,廖娟,朱秋阳. 小型植保无人机喷雾参数对橘树冠层雾滴沉积分布的影响[J]. 华南农业大学学报,2017,38(5):97-102.
CHEN Shengde,LAN Yubin,ZHOU Zhiyan,LIAO Juan,ZHU Qiuyang. Effects of spraying parameters of small plant protection UAV on droplets deposition distribution in citrus canopy[J]. Journal of South China Agricultural University,2017,38(5):97-102.
[20] 刘琪,兰玉彬,单常峰,毛越东. 航空植保喷施参数对苹果树雾滴沉积特性的影响[J]. 农机化研究,2020,42(9):173-180.
LIU Qi,LAN Yubin,SHAN Changfeng,MAO Yuedong. The influence of spraying parameters of aerial application on droplet deposition characteristics for apple fields[J]. Journal of Agricultural Mechanization Research,2020,42(9):173-180.
[21] 何玲,王国宾,胡韬,蒙艳华,闫晓静,袁会珠. 喷雾助剂及施液量对植保无人机喷雾雾滴在水稻冠层沉积分布的影响[J]. 植物保护学报,2017,44(6):1046-1052.
HE Ling,WANG Guobin,HU Tao,MENG Yanhua,YAN Xiaojing,YUAN Huizhu. Influences of spray adjuvants and spray volume on the droplet deposition distribution with unmanned aerial vehicle (UAV) spraying on rice[J]. Journal of Plant Protection,2017,44(6):1046-1052.
[22] 李继宇,兰玉彬,彭瑾. 无人机喷雾粒径对水稻冠层雾滴沉积效果的影响[J]. 湖南农业大学学报(自然科学版),2018,44(4):442-446.
LI Jiyu,LAN Yubin,PENG Jin. Effect of droplet size spraying by unmanned aerial vehicle on droplet deposition in rice canopy[J]. Journal of Hunan Agricultural University (Natural Sciences),2018,44(4):442-446.
[23] 陶波,孔令伟. 无人机喷雾雾滴分布研究[J]. 东北农业大学学报,2018,49(8):64-72.
TAO Bo,KONG Lingwei. Study on spray droplet distribution of UAV[J]. Journal of Northeast Agricultural University,2018,49(8):64-72.
[24] 高军,李兴钊,吴春娟,高艳芹,李秀清,付茂栋,陈立涛. 多旋翼植保无人机在小麦不同生育期飞防飞行参数优选初探[J]. 中国植保导刊,2021,41(1):77-81.
GAO Jun,LI Xingzhao,WU Chunjuan,GAO Yanqin,LI Xiuqing,FU Maodong,CHEN Litao. Preliminary study on optimal flight parameters of multi-rotor plant protection UAV in different growth periods of wheat[J]. China Plant Protection,2021,41(1):77-81.
[25] 刘海明. 无人机飞行高度和速度对喷药效果的影响分析[J]. 农机化研究,2020,42(8):202-206.
LIU Haiming. Impact analysis of the UAV flight height and velocity on the spraying effect[J]. Journal of Agricultural Mechanization Research,2020,42(8):202-206.
[26] 陈盛德,兰玉彬,李继宇,周志艳,金济,刘爱民. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报,2016,32(17):40-46.
CHEN Shengde,LAN Yubin,LI Jiyu,ZHOU Zhiyan,JIN Ji,LIU Aimin. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J]. Transactions of the Chinese Society of Agricultural Engineering,2016,32(17):40-46.
[27] 王昌陵,何雄奎,BONDS J,齐鹏,杨苡,高万林. 不同飞行参数下八旋翼植保无人机下洗气流场对雾滴沉积分布特性的影响[J]. 智慧农业,2020,2(4):124-136.
WANG Changling,HE Xiongkui,BONDS J,QI Peng,YANG Yi,GAO Wanlin. Effect of downwash airflow field of 8-rotor unmanned aerial vehicle on spray deposition distribution characteristics under different flight parameters[J]. Smart Agriculture,2020,2(4):124-136.
