差分GNSS无人机航测技术在城乡供水工程勘测中的应用
2024-04-29熊文
熊文
(江苏万安建筑勘察设计有限公司)
1 引言
本文将详细介绍差分GNSS无人机航测技术在城乡供水工程勘测中的应用。首先,将介绍差分GNSS 无人机航测技术的基本原理,包括GPS 和伽利略导航卫星系统、参考站和移动站、误差消除方法等内容。接下来,将重点讲解差分GNSS 无人机航测技术在城乡供水工程勘测中的应用,包括航线规划、数据采集与处理以及无人机航线设计案例分析等方面。此外,还将介绍数据建库的相关技术,包括数据存储与管理、数据分析与应用等方面。最后,本文将总结差分GNSS无人机航测技术在城乡供水工程勘测中的应用效果,并展望其未来的发展前景。
2 差分GNSS 无人机航测技术的基本原理
2.1 GPS和伽利略导航卫星系统
全球定位系统(GPS)和伽利略导航卫星系统是现代卫星导航系统中最为常用的两种技术。GPS系统由美国空军开发,主要用于军事领域。而伽利略导航卫星系统是欧盟和欧洲空间局合作开发的卫星导航系统,旨在为民用和商业领域提供全球定位和导航服务[1]。
GPS定位误差公式:
式(1)中:P1和P2是卫星发射信号到达接收机的时间;T1和T2是卫星发射信号到达接收机前后的电离层延迟;C是光速。
相机标定公式:
式(2)中:s表示相机像素坐标系下的点坐标;[u,v,1]表示像素坐标系下的点坐标;K表示相机内参矩阵;R和t表示相机的外参参数;[X,Y,Z,1]表示世界坐标系下的点坐标。
这两种卫星导航系统都采用了基于卫星信号的定位方法,其中GPS 系统采用了伪距测量和载波相位测量两种技术,而伽利略导航卫星系统则采用了时间差测量技术。这些技术都具有高精度、高可靠性和全球覆盖等优点,为差分GNSS 无人机航测技术提供了可靠的基础(见表1)。
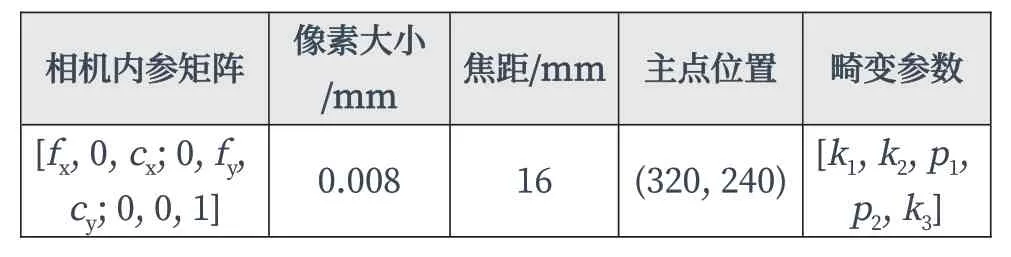
表1 相机标定数据表
2.2 参考站和移动站
在差分GNSS 无人机航测技术中,参考站和移动站是非常重要的组成部分。参考站通常安装在已知位置,并能够同时接收来自多颗卫星的信号。移动站则是无人机上的接收设备,用于接收来自参考站和卫星的信号,实现空间定位和测量。
在实际应用中,参考站和移动站之间的距离往往很短,它们所接收到的信号存在相同的误差。通过对参考站和移动站所接收到的信号进行比较,就可以确定误差的大小和方向,从而实现误差消除[2]。
2.3 消除误差的方法
在差分GNSS 无人机航测技术中,误差是一个非常重要的问题。误差来自多个方面,例如卫星发射的误差、大气层的影响、接收机的误差等。为了提高空间定位和测量的精度,需要对这些误差进行消除。
常用的误差消除方法包括差分GPS、实时运动学(RTK)和虚拟基站网络(VRS)等。其中,差分GPS是最为简单和直接的误差消除方法。它通过比较参考站和移动站所接收到的信号之间的差异,确定误差的大小和方向,从而实现精度的提高。
而RTK则是一种高精度的差分GPS 技术,能够实现厘米级别的精度。它在差分GPS 的基础上,加入了相位观测量和载波相位差分处理,从而实现更高的精度和稳定性。
VRS则是一种基于虚拟基站网络的高精度定位技术。它采用了与RTK类似的原理,但VRS的参考站位置更为灵活,能够自适应地根据需要进行调整和优化,从而实现更高的精度和稳定性。
以上这些误差消除方法都能够有效提高空间定位和测量的精度,从而为差分GNSS 无人机航测技术在城乡供水勘测中的应用提供了有力的支持。
3 城乡供水工程勘测中的差分GNSS无人机航测技术应用
3.1 航线规划
航线的规划和设计直接关系到数据采集的效率和数据的质量。因此,在进行航线规划时,需要充分考虑勘测区域的地形、地貌、地物等因素,制定合理的航线方案,以确保数据采集的效率和质量。
对于城乡供水工程勘测,由于涉及复杂的地形和地貌,航线规划更为重要。在航线规划过程中,需要考虑到勘测区域的地形和地貌情况,避开可能的障碍物,同时保证数据采集的全覆盖和重叠度,从而确保数据的准确性和可靠性[3]。
3.2 数据采集与处理
在差分GNSS 无人机航测技术中,数据采集和处理是非常重要的一环。数据的采集和处理质量直接决定了数据的可用性和精度。因此,在进行数据采集和处理时,需要进行细致、认真地操作,以确保数据的准确性和可靠性。
对于城乡供水工程勘测,数据采集和处理的重点是对水源、水质等方面的数据进行采集和处理。差分GNSS 无人机航测技术可以实现对水源、水质等方面的数据的全面、高效、精确地采集和处理,为城乡供水工程的规划和设计提供了重要数据支持。
3.3 无人机航线设计案例分析
以某市水源地勘测为例,本文设计了一组差分GNSS无人机航测方案,具体方案如下:
1)航线规划
针对该水源地的地形和地貌情况,本文采用了飞行高度60m、重叠度80%、航向间距70m、航线间距200m的航线方案。
2)数据采集与处理
本文采用了国际通用的无人机航测数据采集和处理流程。数据采集使用了无人机搭载的相机采集航拍影像数据,并配合差分GNSS 技术获取影像的空间坐标和高程信息。在采集数据时,需要根据实际勘测需求和采集环境进行相应的参数设置和调整,如航拍高度、重叠度、速度等。
完成数据采集后,需要对采集的影像进行后处理,以获得高精度的地理信息数据。数据处理流程主要包括以下几个步骤。
①基础数据处理:对航拍影像进行去畸变、校正、裁剪等基础处理,以获得准确的影像坐标和高程信息。
②数据匹配:通过影像匹配算法,将不同影像之间的共同特征点进行匹配,以获得影像之间的相对位置关系。
③数字表面模型(DSM)生成:基于影像匹配结果,生成DSM,获得地面表面高程信息。
④正射影像生成:利用DSM和相应的卫星数据进行正射校正,获得无重叠的正射影像。
⑤特征提取和分类:对正射影像进行特征提取和分类,以获取更丰富的地物信息。
3)无人机航线设计案例分析
以某市某水厂供水管网为例,采用差分GNSS无人机航测技术进行勘测。首先,根据勘测范围和航拍参数,设计了一条合适的航线,航线总长约为15km,飞行高度为150m,重叠度为70%。
在采集数据过程中,采用了RTK 差分GPS 技术,确保数据的高精度和实时性。在数据处理过程中,利用Pix4D Mapper Pro 软件进行数据处理和分析,获得了高精度的地理信息数据和地形模型。
通过数据处理和分析,获得了水厂供水管网的精确地理信息和地形模型,为后续的设计、施工和运营提供了有力的支持和保障。同时,差分GNSS 无人机航测技术具有快速高效、低成本、高精度等优点,可以广泛应用于城乡供水工程勘测和设计中[4]。
4 数据建库
4.1 数据存储与管理
无人机航测技术所采集的数据量庞大,因此需要进行有效地存储和管理。一般采用云存储技术,将数据上传至云端存储服务器,便于多人协同工作和数据共享。同时,在数据存储时需要注意数据的备份,以防止数据丢失或损坏。数据备份一般采用数据镜像或者数据同步的方式,保证数据的完整性和可靠性。
4.2 数据分析与应用
无人机航测技术采集到的数据可以用于城乡供水工程的规划、设计和施工等多个方面。其中,数据处理和分析是数据应用的重要环节。
4.2.1 数据处理
数据处理包括数据预处理、数据配准和数据去噪等步骤。数据预处理主要是对原始数据进行筛选和过滤,保留有用的数据,同时去除掉一些误差数据,以提高数据的质量和准确性。数据配准是将采集到的多个图像进行配准,使得图像之间具有相同的坐标系,从而进行后续的数据分析和处理。数据去噪主要是对采集到的数据进行滤波处理,去除一些干扰数据,以提高数据的清晰度和可靠性。
4.2.2 数据分析
数据分析包括特征提取、三维建模和数据分析等步骤。特征提取是根据城乡供水工程的勘测需求,提取出相应的特征信息,例如地形高程、水系分布等。三维建模是将采集到的多个图像进行三维建模,生成真实的三维模型,以便进行后续的工程规划和设计。数据分析主要是对采集到的数据进行统计分析,例如水文分析、地形分析和水资源评价等。
5 结语
本文主要介绍了差分GNSS无人机航测技术在城乡供水工程勘测中的应用,涵盖了基本原理、航线规划、数据采集与处理以及数据建库等方面。通过采用该技术,可以实现高精度、高效率、低成本地勘测,提高勘测精度和可靠性,为城乡供水工程的规划设计和施工提供了有力的支持。随着无人机技术的不断发展和应用的广泛推广,差分GNSS 无人机航测技术在城乡供水工程勘测中的应用将越来越普遍。在未来的发展中,我们还需要进一步完善数据采集、处理和建库等方面的技术,提高无人机航测数据的质量和可靠性,以更好地服务于城乡供水工程勘测的需要。
