一种热释电红外控制芯片设计
2024-04-28吴航杰魏榕山
吴航杰,钟 晟,魏榕山
(福州大学 物理与信息工程学院,福建 福州 350108)
0 引言
热释电红外传感器(Pyroelectric Infrared Detector,PID)是一种基于被动式红外传感技术的先进设备[1]。该技术采用非接触方式来探测人体或其他物体所释放的红外线[2],从而有效克服主动式红外传感器在识别运动生物体与非生物体方面存在的局限性[3]。对比主动式技术可能因不明物体阻挡红外发射机光路而导致误报的情况,热释电红外传感器能够可靠地避免这类干扰[4]。其独特之处不仅在于能够广泛检测温度范围,而且在整个光波谱范围内具有均匀的频率响应[5]。这些特性使得该技术在多个领域得到广泛应用,如温度测量、火灾预警、不同物体辨识、人员安全保障和防范、自动门以及自动照明等领域[4]。随着热释电红外传感器的广泛应用,专用控制芯片作为传感器与负载之间的核心部件[6],因其创新的结构设计和卓越的抗噪声性能,以及对电源和温度波动影响较小等诸多优点,逐渐成为取代传统分立电路和多芯片组合方式的首选[7]。针对其性能特点,业界不断进行着性能改进和技术完善,以满足日益增长的需求和更广泛的应用场景[8]。
本文设计的热释电红外探测器专用控制芯片属于一款数模混合芯片。基于对热释电红外传感器探测器所输出信号的分析,结合特定设计要求,经过严谨的综合考虑,本文设计了振荡器、带隙基准电路、模数转换器以及数字电路等模块。经过实验仿真验证,所设计的电路展现出特定的频率选择和有效的滤波效果,满足低功耗要求,成功实现了对热释电红外信号的处理。这一研究结果为热释电红外传感器的信号处理提供了可靠的解决方案,可在各种应用场景发挥重要作用。
1 热释电红外控制芯片的系统设计
热释电红外控制芯片由模拟信号处理电路和数字信号处理电路两部分组成,系统架构如图1所示。这一系统包括多个模块,主要模块有环形振荡器、带隙基准电流源、上电复位电路、模数转换器、数值比较器以及数字带通滤波器等。带隙基准电流源用于提供可靠的电流基准,保障芯片内部电路的稳定运行。环形振荡器的作用在于产生模拟时钟信号,经过二分频后为数字电路提供系统时钟CLK,确保芯片各模块同步运行。上电复位电路负责在芯片上电时对其进行初始化设置,保证其正常工作。模数转换器负责将模拟信号转换为数字形式,如图1中的数字码ak、bk和ck,以便后续数字信号处理。数字带通滤波器用于过滤并得到所需频率范围的信号,以供后续处理或输出使用。数字比较器用于比较数字码ak与灵敏度阈值码bk,从而判断PIRN信号是否满足特定条件。这些模块相互配合,构成了热释电红外探测器专用控制芯片的完整功能结构,为热释电红外探测器的信号处理提供必要的支持和保障。
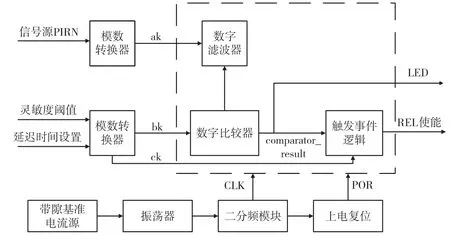
图1 系统电路框图
2 电路设计
2.1 环形振荡器
为实现低的静态功耗,在满足振荡频率范围的条件下,本设计采用环形振荡器来给系统提供时钟信号,电路原理如图2所示。
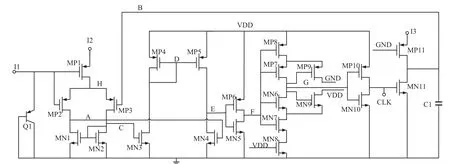
图2 环形振荡器电路
图2电路的工作过程分为充电过程和放电过程。图2中,A~H处的电压分别表示为VA~VH。充电过程中,刚上电时初始的VB为低电平,MP3导通,VC为高电平,MN1、MN2、MN3导通;VA、VD为低电平,MP4、MP5导通,MN4不导通,VE为高电平;经过反相器后VF为低电平,再经过施密特触发器后VG为高电平,VG经过反相器得到信号CLK为低电平,MN1不导通从而使电容C1能完成充电。放电过程中,当电容C1两端的电压充电至VB-VH>|VTHP(VTHP表示的是MP3管子的阈值电压),MP3不导通,进而MN1、MN2不导通,MNP2导通,VA为高电平,MN4导通后VE为低电平,VE经过两个反相器和一个施密特触发器后得到CLK为高电平,MN1导通,C1电容开始放电,VB电压随之下降,当VB电压下降至满足MP3导通时,重复充电过程。
2.2 带隙基准电流源
为了给振荡器的电容充电以及给模数转换器提供偏置,本文设计了一种带隙基准电流源,电路原理如图3所示。
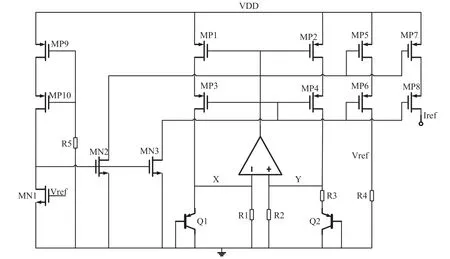
图3 带隙基准电路
图3的带隙基准电路基于正负温度系数电流相加的工作模式,根据运放的特性[9-10],电阻R1和R2的电流相等,Q1和Q2的集电极电流也相等。若晶体管Q2和Q1发射结面积之比为N,则流过电阻R3的电流为
式中:VEB1和VEB2分别为Q1、Q2管的发射极和基极之间的电压,VT是热电压。流过MP2的电流I2是电阻R2和R3的电流之和,可以表示为
式中:VY是电阻R2上的电压。如果晶体管MP1、MP2、MP5和MP7的宽度W和长度L的比例相同,则流经MP7的电流Iref和R4上的电压可以表示为
从式(4)可以得到,选择合适的电阻R2和R3阻值和发射结面积比N,可以改变正温度系数的权重,从而使得带隙基准源的输出电压与温度无关。
2.3 上电复位电路
本设计的数字部分使用了大量的触发器和寄存器。由于设计的芯片没有预留外部的复位信号端口,因此芯片内部设计了一个上电复位模块,电路结构如图4所示。
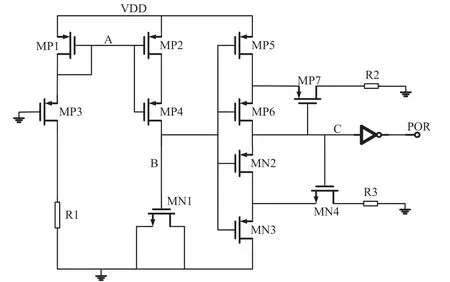
图4 上电复位电路
上电复位电路的要求是,在VDD上电过程中复位电路赋予数字电路初始值,上电结束后复位电路停止工作,对数字电路的工作不产生任何影响。图4中,VDD从0 V到5 V上电,在这个过程中MP1、MP2、MP3、MP4管子相继导通,MN1等效为一个电容器,B点电位从0 V开始上升。当VB电压小于MN2和MN3的导通电压,C点电位为高,POR输出为低电平;当VB电位大于MN2和MN3的导通电压,C点电位为低,POR输出为高电压。上述工作过程完成了VDD上电时POR输出由低电平到高电平的一个变化。当VDD上电稳定后,VB电位一直为高,即POR输出也一直为高电平,本设计的数字电路为低电平复位,满足设计要求。
2.4 模数转换器
系统里包含两个模数转换器,其中一个模数转换器负责对红外热释电探头输入的低频信号进行采样和处理,随后将处理后的数字码传送至数字滤波器以进行进一步的信号处理。另外一个模数转换器负责将灵敏度阈值电平和延迟时间设置电平转换为数字码。设计中的这两个模数转换器在整体系统中扮演着关键的角色,它们在系统中的连接和功能布局如图1所示。这两个模数转换器有效地实现了对输入信号的转换和处理,为热释电探头的信号采集和控制提供了必要的支持。
在图1的系统中,灵敏度阈值电平和延迟时间设置电平经过模数转换器后各自转换为数字码bk和数字码ck。需要强调的是,将灵敏度阈值电平和延迟时间设置电平转换为数字码的模数转换器,仅在触发使能信号来临后的8个CLK时钟周期内工作。前4个CLK时钟周期内将灵敏度阈值电平转换为数字码bk,后4个CLK时个钟周期内将延迟时间设置电平转换为数字码ck。当8个时钟周期计数完成,该模数转换器停止工作以降低系统功耗。
数字码bk被输入至数字比较器,与从热释电红外传感器输入的模拟信号转换而来的数字码ak进行比较。当数字码bk小于数字码ak时,比较器输出为1;当数字码bk大于数字码ak时,比较器输出为0。比较器输出为1时,由触发时间逻辑模块控制的REL输出也为1,同时根据数字码ck所对应的上电时间启动计时。如果计时达到设定时间而比较器输出仍为1,则重复进行计时操作;如果在计时过程中比较器的输出变为0,即表示红外信号低于灵敏度阈值,则根据数字码ck对应的延迟时间,REL将持续输出为1,直至延迟时间计时结束为止。这一过程中,数字码ck的作用是控制相应的计时和延迟操作,确保系统能够准确响应并判断红外信号的强度和REL输出为1的持续时间,从而实现相应的输出和控制动作。
2.5 数字电路设计
数字部分的电路涵盖了多个关键模块,主要包括二分频电路、数字滤波器、数字比较器和触发事件逻辑等模块,各模块在整体电路中的框图如图1所示。这些模块在热释电红外控制芯片系统中具有至关重要的作用。二分频模块负责对振荡器产生的时钟信号进行分频,将时钟频率降低至模拟时钟频率的一半,并确保时钟信号50%的占空比。这一过程为数字电路提供了更适宜的时钟信号。数字滤波器由二阶低通滤波器与三阶高通滤波器级联组成带通滤波器。根据市面上热释电红外传感器输出信号的频率,级联后的数字带通滤波器的通带频率设置为0.44~7 Hz,作用是滤除信号中不需要的频率成分,使得输出更为精确、可靠。触发事件逻辑模块内部存储着延迟时间数字码对应的不同计数值,根据不同数字码的选择来控制上电时间和延迟时间,从而影响REL的输出。这些设定需要根据具体应用场合对传感器的触发逻辑进行调整和控制。
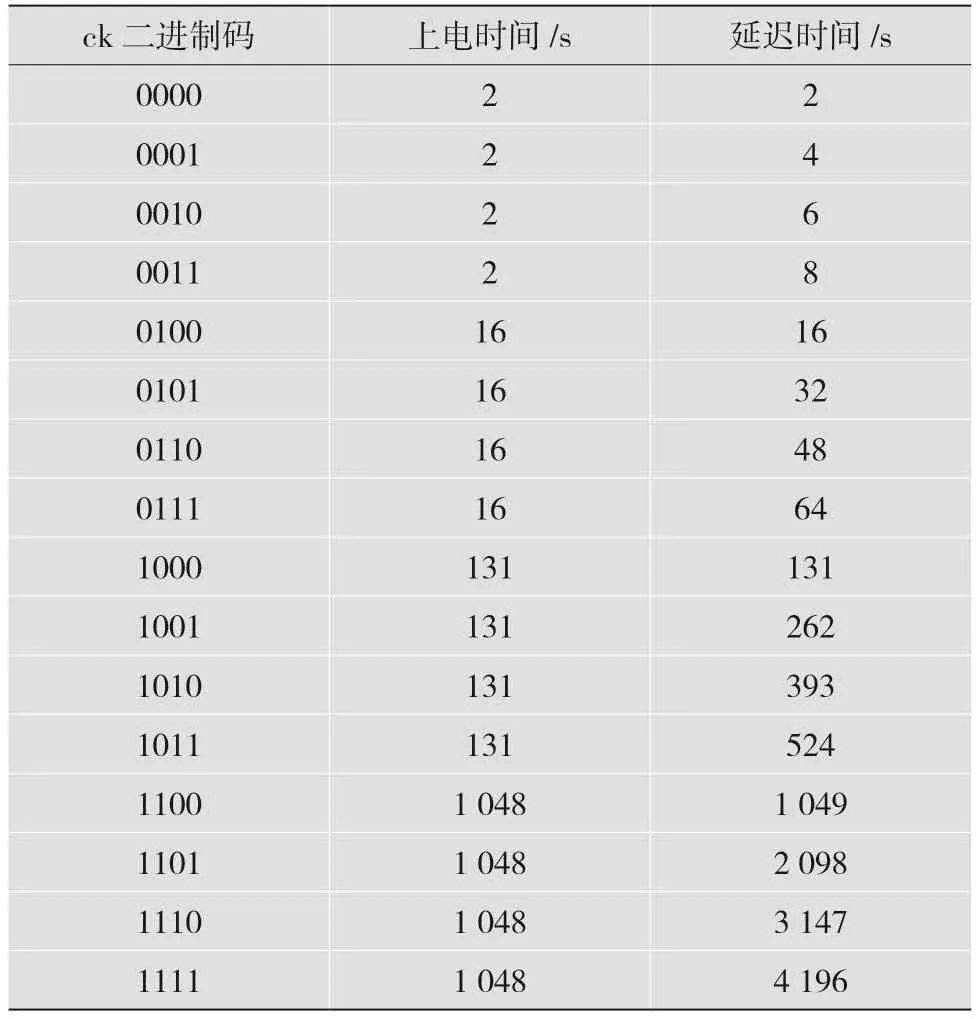
表1 数字码ck对应的上电时间和延迟时间
所有的数字模块都是通过Verilog代码实现,并且通过AMS仿真进行数模混合验证,在确保其前仿功能的正确的情况下通过数字后端综合生成数字版图。
3 仿真结果及分析
本电路采用5 V 1P3M CMOS工艺进行设计,并在Cadence软件Virtuoso环境下对电路进行仿真验证。
3.1 环形振荡器的仿真
在5 V电源电压下,-40~120 ℃范围内对带隙基准电流模块和环形振荡器模块进行工艺角仿真和温度仿真,得到不同工艺角和不同温度下的时钟振荡频率和电流功耗,如表2所示。仿真表明,在tt工艺角和室温23 ℃条件下,未进行二分频时的时钟周期约为15.67 μs,此时的电流功耗大约为12.84 μA。对表2进行分析可知,ff工艺角下的时钟周期最小、频率最高,电流功耗最高;而ss工艺角下,时钟周期最大、频率最低,但电流功耗也最低。需要强调的是,数字电路内部共用经过二分频后的时钟信号,同时输入信号PIRN的频率仅为几个赫兹。因此,尽管存在模拟时钟的偏差,但并不会对整个芯片的整体功能产生影响。这表明数字电路能够有效处理并兼容不同工艺角下的时钟频率及功耗变化,保证芯片功能的稳定性和可靠性。
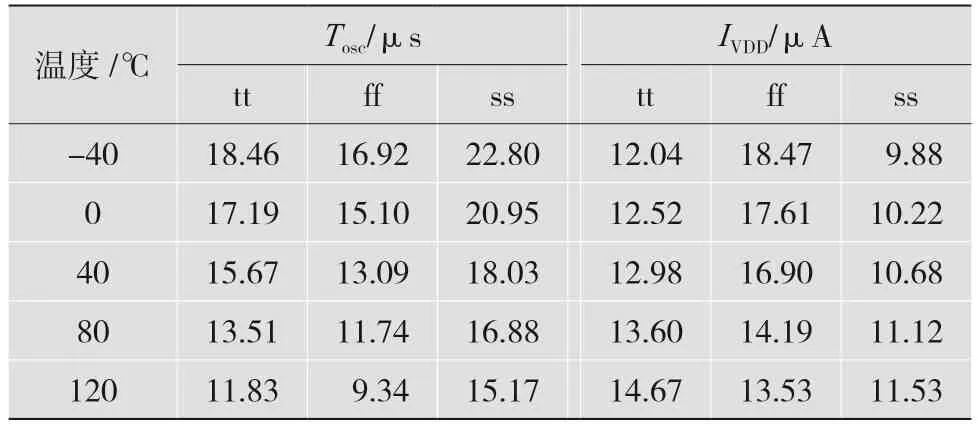
表2 振荡器在不同温度、不同工艺下的时钟周期和电流功耗
3.2 上电复位的仿真
初始时,电源电压设置为0 V,经过0.1 ms的时间,电源电压翻转至5 V,并持续保持在5 V的电压状态直至2 ms。随后,在2 ms时刻电源电压开始逐渐下降,到达2.1 ms时降至1 V,继续保持1 V电压状态直至4 ms。而在4 ms时,电源电压重新开始上升,在4.1 ms时达到5 V,电源电压VDD波形如图5所示。POR电压波形如图6所示。
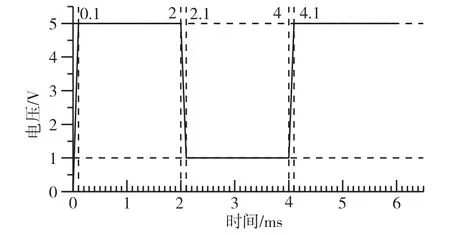
图5 电源电压VDD波形图
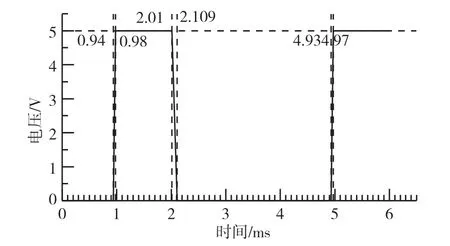
图6 POR电压波形图
根据图6上电复位电路的输出POR电压波形可知,在初始电源电压翻转到5 V时,上电复位电路的输出POR电压仍保持在0 V状态。经过0.94 ms后,复位电路开始进行翻转,在0.98 ms时,POR信号翻转至5 V。电源电压翻转至5 V后POR保持低电平的这段时间即是数字电路复位时间。复位时间远超出时钟信号CLK的周期时间,满足了对数字电路的复位要求。随着电源电压开始下降,POR电压随之降至0 V,重新对数字电路进行复位,从而保障芯片的正常运行。在4 ms时,随着电源电压重新上升,复位信号POR再次经历了先保持低电平再翻转至高电平5 V的过程,以确保数字电路得到正确的初始化,并能够稳定运行。
3.3 整体电路的仿真
对整体电路进行数模混合仿真,得到系统的时序波形。图7为环形振荡器的时钟信号波形和经过二分频模块后的时钟信号波形示意图。仿真结果表明,tt工艺角、室温环境下,环形振荡器产生的模拟时钟信号CLK_OSC的高电平保持时间小于低电平保持时间,经过二分频电路后的数字时钟信号CLK的频率为模拟时钟信号频率CLK_OSC的一半,占空比为50%,频率为64 kHz。
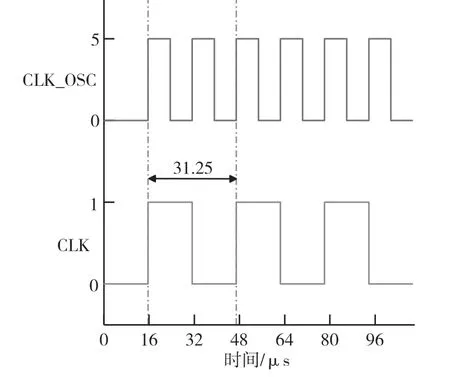
图7 系统时钟波形图
整体电路时序波形如图8所示。图8中的CLK波形是通过二分频电路后产生的时钟信号,CDS则是由控制触发禁止的端口输入进来的信号。当CDS信号小于施密特触发器的VTHRL阈值时,系统内部电路会拦截触发信号的传递,将输入图1中触发事件逻辑模块的comparator_result信号置为无效状态,导致REL端持续输出低电平信号。当CDS大于施密特触发器的VTHRH时,内部电路开启触发信号,此时比较器若产生高电平的comparator_result信号,触发事件逻辑模块进入计时阶段,同时REL输出高电平。芯片在应用时,CDS端结合光敏电阻,可以设定白天关闭系统、晚上开启工作的模式,从而提高系统的灵活性和智能性。由图8可知,当CDS信号由低电平翻转为高电平,并且CLK信号由低电平翻转为高电平时,内部的模数转换器开始工作。
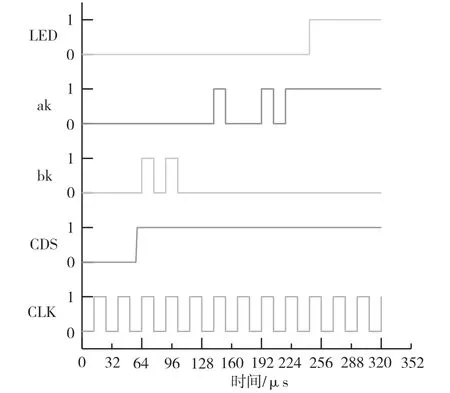
图8 整体电路时序波形图
数模混合仿真时,所设定的灵敏度阈值的直流电平经过模数转换器后转换成1010的数字码bk。bk存入数字比较器中,等待数字码ak到来后与之比较。如图9所示,数字码ak一开始为0000,比bk小,所以LED输出一直为低电平。随着输入信号PIRN逐渐增强后ak为1001,但仍然小于数字码bk,所以LED保持低电平输出;当输入信号增强到使ak为1011,则在下一个CLK高电平翻转时LED输出为1;若PIRN信号持续增强,使ak为1111,则LED保持高电平输出。
4 结语
本文介绍了基于5 V 1P3M CMOS工艺、采用数模混合设计的一种热释电红外传感器控制芯片。该芯片能完整实现对红外信号的接收、放大、处理,产生有效数字电平用于驱动继电器、可控硅等负载。该芯片还设计了灵敏度阈值可调和延迟时间可调等功能,使其能灵活地适用于不同场景和需求。通过数模混合仿真结果可知,在5 V电源电压、tt工艺角和27 ℃的室温条件下,该芯片的静态功耗为17.52 μA,动态功耗小于0.93 mA。在3~5.5 V的电压范围内,芯片能稳定可靠地实现其功能。