光纤传感技术结合SVM-ELM的风力机齿轮箱故障诊断分析
2024-04-27曾宪旺孙文磊王宏伟
曾宪旺,孙文磊,王宏伟
(新疆大学机械工程学院,新疆 乌鲁木齐 830046)
1 引言
风力发电充分利用可再生风能资源是最重要的发电方式之一[1]。齿轮箱作为风力发电机(以下称风力机)组整机系统中最重要的精密传动部件,其运行状态健康与否直接影响整个设备[2]。风力机组的运行状况复杂多变且工作环境较为恶劣,传动系统中齿轮箱的故障约占比总故障的60%[3]。因此,对齿轮箱进行实时的健康状态监测并及时发现故障位置和预测损伤程度具有重要意义。
目前,针对齿轮箱故障问题国内外学者也进行了深入的研究,文献[4]针对大型风力机齿轮故障问题通过计算固有模态分量(Intrinsic Mode Function,IMF)进而判断齿轮劣化的故障类型。文献[5]将变分模态分解与概率神经网络(Probabilistic Neural Net work,PNN)算法相结合的方法对风力机齿轮箱进行了故障类型的识别分类。文献[6]通过PNN 和极限学习机(Extreme Learning Machine,ELM)算法进行对比,提高了故障诊断正确率。文献[7]提出了一种光纤布拉格光栅技术结合支持向量机(Support Vector Machine,SVM)的故障检测方法,提高了故障识别概率。文献[8]通过对多尺度排列熵(Multi-scale Permutation Entropy,MPE)的计算进而分析信号的冲击成分并利用聚类算法进行诊断,验证了该方法的有效性。
基于上述研究,该文将光纤布拉格光栅(Fiber Bragg Grating,FBG)传感技术与故障诊断算法相互结合进而能够更加有效的提取风力机齿轮箱的故障状态特征。首先通过光纤布拉格光栅动态监测系统对风力机齿轮箱故障平台进行数据采集,其次通过变分模态分解(Variational Mode Decomposition,VMD)和MPE算法对信号进行固有模态分量的有效分离和时频域划分并构建特征向量集。最后通过SVM、PNN、ELM算法进行对比完成对风力机齿轮箱的故障诊断分析。
2 光纤动态监测系统设计
2.1 光纤光栅检测技术原理分析
FBG传感器的纤芯中具有折射率周期性变化结构,通过标定光栅能够对布拉格条件进行调整进而依据耦合模理论可以将符合条件的波长反射回去,FBG的中心波长可以表示为:
式中:λB—FBG的中心波长;n—折射率;Λ—栅格周期。FBG的工作原理地,如图1所示。
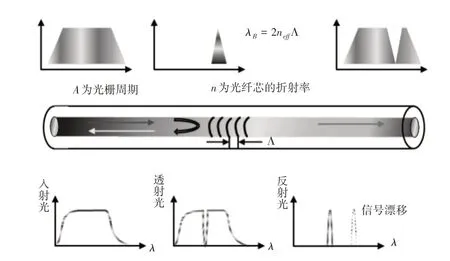
图1 FBG的工作原理Fig.1 How FBG Works
当FBG传感器的检测端光纤光栅栅区受到由于应变的变化而产生纵向的拉伸或压缩时,FBG波长的漂移Δλ和纵向应变Δε的关系为:
式中:ΔΛ—弹性变形量;Δneff—纤芯弹光效应。当由于应变变化进而引起检测端光纤光栅栅区受力改变,使得弹光效应和弹性形变都会受到影响,故应变引起光纤光栅的波长变化可表示为:
2.2 光纤动态监测系统架构设计
光纤动态监测系统的灵敏性好、分辨率高、抗电磁干扰并且可以实现分布式布设。结构组成主要包括光源部分、标定光栅部分、解调电路板以及数据采集卡。首先由ASE宽带光源发出宽带光传递到单向隔离器中,单向隔离器主要是为了防止光返回进而对光源造成损伤,其次由滤波FBG进行布拉格条件筛选并通过分路器进行多端检测,最后经过信号处理系统进而传递给数据采集卡并通过系统控制计算机进行信息呈现。光纤光栅动态监测系统框架,如图2所示。光纤动态监测系统,如图3所示。
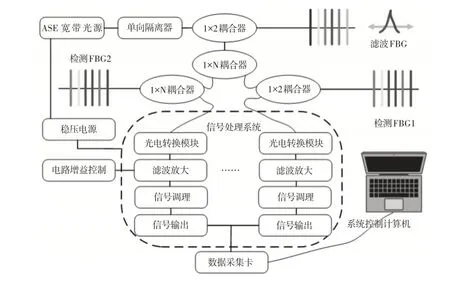
图2 光纤光栅动态监测系统框架Fig.2 Framework of FBG Dynamic Monitoring System
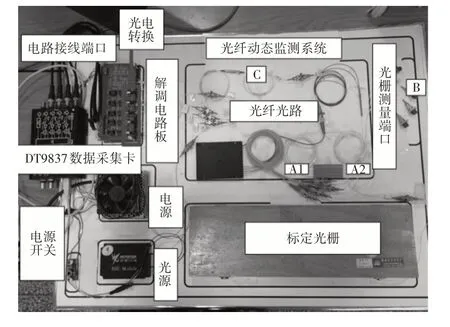
图3 光纤动态监测系统Fig.3 Optical Fiber Dynamic Monitoring System
3 故障诊断实验平台总体布局
3.1 风力机齿轮箱故障动态监测系统设计
风力机齿轮箱故障动态检测系统主要是通过光纤光栅检测技术对信号进行采集并通过相关的算法对其进行故障状态预测分析。首先由FBG动态监测系统对风力机实验平台进行信号采集,并对信号进行降噪处理之后用VMD算法获得变分问题的最优解。其次通过MPE算法对故障信号进行相空间重构并对不同尺度因子下的排列熵值进行特征向量集的构建。最后通过PNN、ELM、SVM分别从正确概率和时间方面进行模型诊断分析。系统框架,如图4所示。实验采集平台,如图5所示。
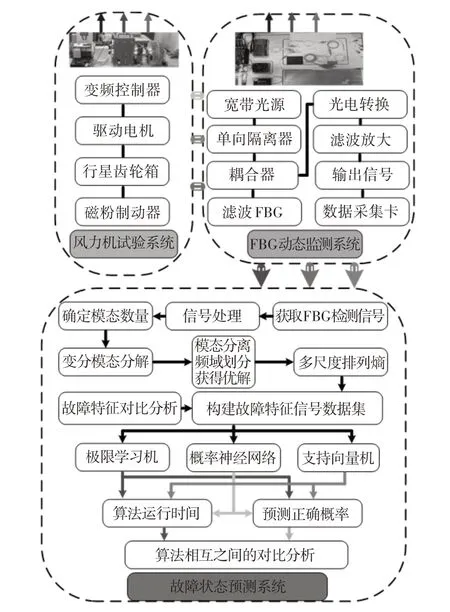
图4 故障状态预测系统框架Fig.4 Framework of Fault State Prediction System
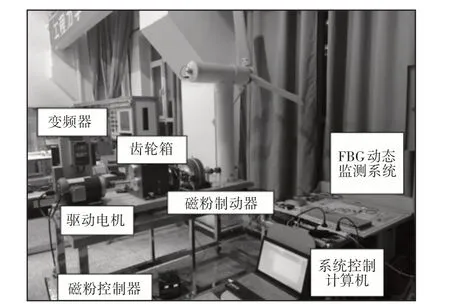
图5 FBG动态监测实验采集平台Fig.5 FBG Dynamic Monitoring Experimental Acquisition Platform
3.2 模态参数K的确定及特征向量集的构建
变分模态分解算法的关键是将时间序列分解为K个具有固定中心频率的模态分量,所以中心频率K的选取正确与否直接关系到分解出信号的优劣。通过中心频率法对其进行分析,不同K值对应的中心频率,如表1所示。当所选取的K值过小将导致经过分解之后的固有模态分量所包含的重要故障信息被过滤产生欠分解现象,当K值选择过大会使得信号产生频率混叠现象。由表1可知,当K值小于5时后两者的中心频率数值之间的相差较大,当K值等于6时后两个中心频率之间的差值较小可能已经出现了频率混叠,故模态个数K选择5最为合适。

表1 不同K值对应的中心频率Tab.1 Center Frequencies Corresponding to Different K Values
多尺度排列熵算法能够对不同尺度下的故障信号进行更加直观地分析,当嵌入维度m=6;尺度因子s=12;延迟时间τ=2时。4种类型故障状态下的多尺度排列熵值,如图6所示。随着尺度因子的增加不同故障类型的排列熵值变化差异性较大。由于齿轮断半齿和缺齿属于相似故障类型在尺度因子小于4时两者的变化趋势类似。当尺度因子等于5时裂纹状态的熵值发生相应突变。正常状态的齿轮变化最为平缓无较大波动。如图6所示可明显分析出故障状态与正常状态的熵值变化的异同故引入MPE来量化故障特征信号。
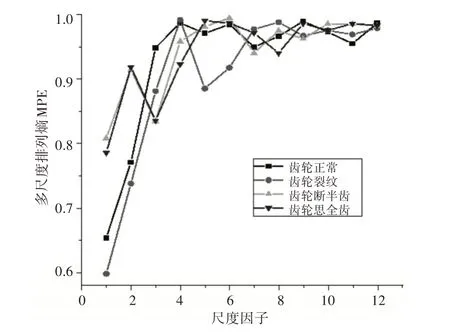
图6 不同类型故障信号MPEFig.6 MPE of Different Fault Signals
对于故障状态特征向量集的构建可利用光纤光栅动态监测系统对风力机齿轮箱的故障实验平台进行数据采集,所采集到的波长信号需进行处理进而使得数据所受外界环境的影响尽可能的小。首先利用VMD 算法对信号进行分析得到相应的IMF,不同IMF之间所包含故障信号的丰富程度有差异,所以需要引入排列熵算法对IMF进行计算并通过IMF 之间对比分析筛选出包含故障信号最丰富的序列。最后通过选择最优的数据长度进行MPE的计算将熵值分类排序构造特征向量集。每种状态的信号选取20组排列熵值数据,对4种故障状态进行组合共80组特征向量数据并对其进行分析。部分特征向量,如表2所示。

表2 部分特征向量Tab.2 Shows Part of Eigenvectors
4 风力机齿轮箱故障诊断分析
利用光纤布拉格光栅监测系统采集风力机齿轮故障状态的数据,并且利用VMD和MPE进行故障特征向量集构建。数据集包括齿轮正常状态、齿轮产生裂纹的状态、齿轮断半齿的状态以及齿轮缺齿状态。共80组数据并且将其导入极限学习机算法中进行故障诊断。由于样本集选取的随机性故需要进行超过30次的实验。ELM的故障诊断结果,如图7所示。测试正确概率和时间,如表3所示。

表3 ELM的测试正确概率和时间Tab.3 Correct Probability and Time of ELM Test
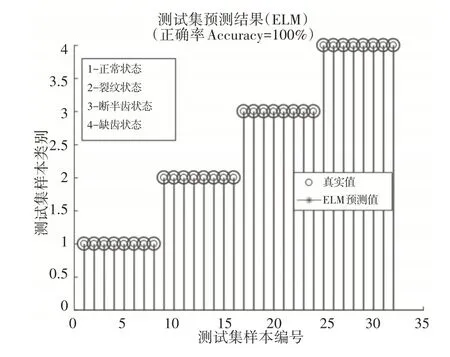
图7 ELM的故障诊断结果Fig.7 Fault Diagnosis Results of ELM
利用PNN算法对风力机齿轮进行故障诊断预测,同时综合运用了光纤光栅检测技术与算法相结合的方法对数据进行处理,通过VMD算法求得最优解。并通过MPE进行相空间重构,计算出MPE值并构造特征向量集。最后通过PNN进行模型诊断。由于PNN 能够将故障样本空间映射到故障模式中进行非线性分析,使其具有较强的自适应能力。将故障特征向量集导入PNN模型中并对数据进行不同故障状态的分类以便更好的进行概率预测,为了得出更加优化的结果需要进行超过30次的实验,随机选取一次的PNN测试正确率,如图8所示。随机选取12次的测试概率以及运行时间,如表4所示。

表4 PNN测试正确概率和时间Tab.4 Correct Probability and Time of PNN Test

图8 PNN的故障诊断结果Fig.8 Fault Diagnosis Results of PNN
支持向量机算法具有较高的泛化性能,SVM引入核函数能够在高维空间中映射训练数据进而构建非线性函数。首先通过光纤光栅动态监测系统在实验平台上进行数据采集,其次对原始数据进行降噪等信号处理并用VMD算法进行包含重要故障特征信号的模态重构进而对5个IMF进行分离得到故障信号的有效分解,最后通过MPE算法构件特征向量集并将其导入支持向量机算法中进行VMD-MPE-SVM的故障诊断方法进行故障识别。选取正确率最高的一次预测结果,如图9所示。随机选取12次的测试概率和时间,如表5所示。
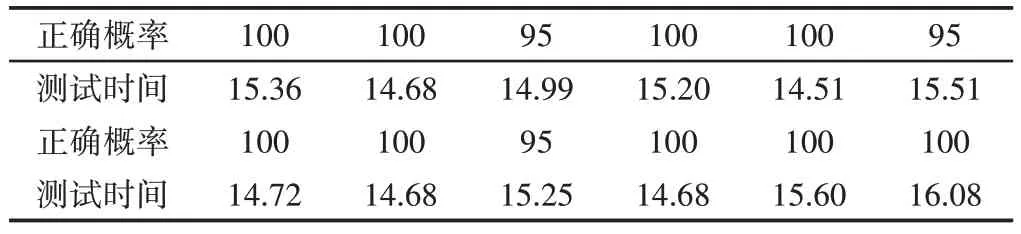
表5 SVM测试正确概率和时间Tab.5 Correct Probability and Time of SVM Test
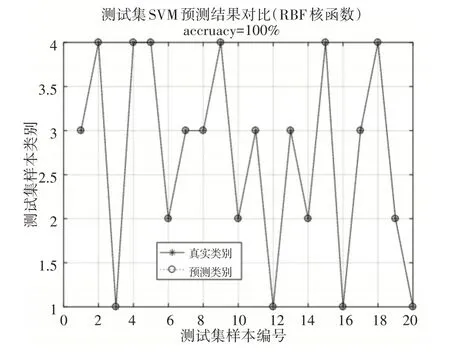
图9 SVM的故障诊断结果Fig.9 Fault Diagnosis Results of SVM
通过对SVM、PNN、ELM算法在测试的正确概率和测试时间方面进行对比分析可知,ELM算法的平均正确率为99.47%优于SVM和PNN并且ELM算法在运行过程所用耗时也是最短,能够快速高效的完成故障特征的分类和预测。
5 结论
该文基于光纤光栅检测技术并将其与PNN、SVM和ELM算法进行结合有效地对风力机齿轮箱故障进行识别诊断,并通过实验验证了该方法的准确性和可靠性主要得出如下结论:(1)实现了对光纤动态监测系统的设计,并完成了风力机齿轮箱故障状态实验平台的搭建通过光纤光栅检测平台完成齿轮箱不同类型故障状态的数据采集。(2)利用VMD对信号重构进而实现IMF的有效分离和信号的频域划分并获得变分问题的最优解,然后通过MPE算法提取包含故障特征尽可能丰富的序列,并构建不同类型的故障特征向量集。(3)通过SVM、PNN、ELM算法对特征向量集合进行分类和预测,并从测试的正确概率和测试时间方面进行对比分析表明极限学习机算法能够准确实现故障模式分类且提高了故障识别正确率。
