六向钢节点摆动电弧增材制造及其承载性能
2024-04-27余圣甫何天英
齐 膑,余圣甫,刘 曙,何天英
(1.华中科技大学材料科学与工程学院,湖北 武汉 430070;2.中建钢构武汉分公司,湖北 武汉 430070)
1 引言
随着经济与社会的发展,我国钢结构建筑向着大型化、复杂化和个性化发展,钢结构建筑由于具有结构强度高、自重轻和节能环保等优点得到广泛应用[1]。多向钢节点作为连接不同造型钢结构的关键构件,在钢结构建筑中起到举足轻重的作用。多向钢节点常用的制造方法为铸造和焊接两种,采用铸造和焊接方法制造的多向钢节点有时产生各种缺陷,这会导致使用多向钢节点连接的钢结构建筑安全性、可靠性和稳定性降低[2-4]。电弧增材制造技术利用电弧热熔化金属丝材,然后根据预设的分层切片和路径规划策略层层堆积成形复杂金属构件,其由堆积金属组成,力学性能优异[5-7]。利用电弧增材制造技术成形的多向钢节点可有效避免铸造和焊接钢节点存在的缺陷,电弧增材制造技术是成形多向钢节点有效的方法之一。
电弧增材制造大型复杂金属构件时,一般采用多道搭接工艺。一些研究表明,多道搭接区域易出现未熔合缺陷,这会导致制造的构件不能满足使用要求[8-9]。摆动工艺可以大幅增加单道堆积金属宽度,可减少搭接数量或无需多道搭接,能避免堆积过程中产生搭接缺陷的几率从而减少堆积金属的缺陷[10-12]。文献[13]研究发现摆动电弧增材制造技术不仅可以避免缺陷,而且可以提高堆积金属成形精度。
为实现建筑钢结构多向钢节点无缺陷、高精度、高性能成形,利用摆动电弧增材制造技术成形六向钢节点,研究六向钢节点成形策略、路径规划以及成形精度。利用有限元分析和台架测试相结合的方法,对电弧增材制造的六向钢节点承载性能进行评价。
2 试验设备及方法
2.1 试验设备
试验设备包括电弧增材制造设备、三维测量设备和台架测试设备。电弧增材制造设备包括6轴Kuka机器人、Fronius焊接电源、Fronius焊枪和2轴变位机等,用于电弧增材制造六向钢节点。三维测量设备包括6轴Kuka机器人、面结构光三维扫描仪和PC等,用于测量和分析制造的六向钢节点成形精度。台架测试设备包括反力架、千斤顶、油泵和应变仪等,用于测量六向钢节点的承载性能。
2.2 试验方法
2.2.1 六向钢节点电弧增材制造试验
利用UG软件建立六向钢节点三维模型,根据六向钢节点结构特点,对六向钢节点进行分区并确定不同区域成形策略,然后导出各区域STL文件,再利用JAVA程序对STL文件进行分层切片和路径规划以生成机器人代码,最后将代码导入机器人控制柜进行电弧增材制造六向钢节点。同时,在堆积过程中,利用三维测量设备测量和分析六向钢节点不同区域成形精度。
2.2.2 有限元分析
首先建立六向钢节点的三维模型,然后进行单元网格划分,采用的单元类型为四面体C3D4单元,边界条件和实际工况保持一致,沿轴向加载,施加的最大载荷为设计载荷的1.3 倍,利用abaqus软件进行应力分析,得到六向钢节点在实际工况下的应力分布云图。
2.2.3 承载试验
在六向钢节点应变测量区域粘贴应变片,然后将六向钢节点固定于制作的反力架中,通过液压千斤顶和油泵对六向钢节点施加载荷,为了验证电弧增材制造六向钢节点的承载能力,试验过程分为加载和卸载两部分,加载从零逐级增加至设计载荷的1.3倍,共分为8级,(1~5)级载荷按照15%最大试验荷逐级递增,(6~7)级载荷按照10%最大试验载荷逐级递增,第8级增加5%最大试验载荷;卸载从最大试验载荷减至零,共分为4级,逐级卸载25%最大试验载荷。加载和卸载过程中每隔一定时间读取和记录应变数值。
3 六向钢节点摆动电弧增材制造
3.1 六向钢节点结构分析及成形策略
某钢结构建筑的六向钢节点模型,如图1(a)所示。其由主管1和支管2、3、4、5构成,四个支管均与主管1相贯,它们以主管为基体向不同方向延伸,同时支管4、5也互相相贯。根据各管相贯区的特点分为两管相贯区和三管相贯区,其中支管2、支管3与主管1相贯类型均为两管相贯,支管4、支管5和主管1相贯类型为三管相贯,如图1(b)所示。各管相贯区均为复杂空间曲面,支管2、3、4和主管1轴线夹角均为90°,支管5和支管4轴线夹角为45°,六向钢节点的结构较为复杂。六向钢节点各管尺寸,如表1所示。六向钢节点各管尺寸较大,其中主管尺寸最大,它的外径为330mm,内径为270mm,长度为1.4m。六向钢节点为大型复杂金属构件,具有较高的成形难度。
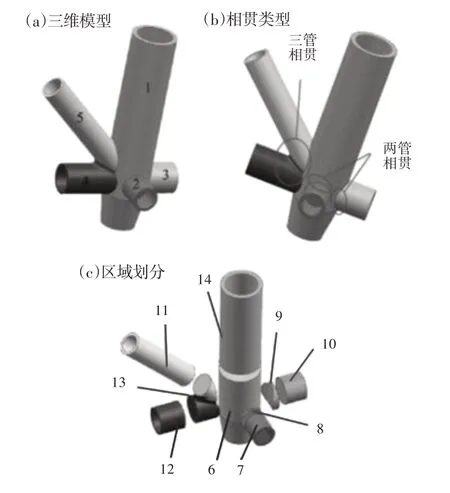
图1 六向钢节点结构Fig.1 Six-Directions Steel Node Structure

表1 六向钢节点各管尺寸Tab.1 Pipe Size of Six-Directions Steel Node
成形策略确定的准则主要是避免成形构件与电弧枪之间的相互干涉,并确保构件的成形精度。针对六向钢节点结构特点,采用分区电弧增材制造策略成形六向钢节点,六向钢节点区域划分,如图1(c)所示。六向钢节点各管管体分为相贯区和直壁圆筒区,将六向钢节点分为6、8、9、13相贯区和7、10、11、12直壁圆筒区。为了避免主管1已成形区域对其它管体的成形产生干涉,将主管1分成6、14两个部分分别成形。在成形过程中,先成形主管部分6,然后以主管为基体成形支管2和支管3相贯区8、9和直壁圆筒区7、10,再成形支管4和支管5,支管4和支管5与主管1构成三管相贯区。为了避免分别成形支管4和支管5时产生互相干涉,先成形三管相贯区13,再分别成形支管4、5 直壁圆筒区11、12,最后成形主管剩余部分14。六向钢节点电弧增材制造的成形顺序为:先成形区域6,再成形区域8、7、9、10,然后成形区域13、12、11,最后成形区域14。
3.2 六向钢节点分层切片及路径规划
对于主管1,采用等厚平面切片沿着主管轴线方向进行切片,切片轮廓为圆环形,采用摆动工艺堆积成形。
对于支管2,其可分为两管相贯区和直壁圆筒区,切片方向为支管2轴线方向,如图2(a)所示。直壁圆筒区采用摆动工艺堆积成形,摆动路径示意图,如图2(b)所示。两管相贯区切片轮廓,如图2(c)所示。采用轮廓偏置路径对其进行填充。对于支管3,切片方向也为其轴线,切片轮廓及填充路径与支管2相同,也采用轮廓偏置路径填充。

图2 支管2分层切片及路径规划Fig.2 Branch Pipe 2 Layered Slicing and Path Planning
对于支管4、5,其可分为三管相贯区和直壁圆筒区,三管相贯区和支管4直壁圆筒区切片方向为支管4轴线方向,支管5直壁圆筒区域切片方向为其轴线方向,如图3(a)所示。三管相贯区切片轮廓,如图3(c)所示,为兼顾成形效率和成形精度,采用轮廓偏置与扫描混合路径对其进行填充。直壁圆筒区同样采用摆动工艺堆积成形,如图3(b)所示。

图3 支管4、5分层切片及路径规划Fig.3 Branch Pipes 4 and 5 Layered Slicing and Path Planning
3.3 六向钢节点制造及精度分析
根据六向钢节点各区域成形顺序,首先堆积主管部分,采用摆动工艺堆积主管,摆动工艺参数为:单边摆动幅度为13.5mm,焊枪移动速度为1.4mm∕s,送丝速度为6.2m∕min。将主管堆积至680mm高后,利用三维扫描仪获取其点云数据,将点云数据导入到Geomagic studio软件进行自动拟合拼接与计算,堆积的主管,如图4(a)为所示。其三维测量结果,如图4(b)所示。利用Geomagic studio软件分析得到摆动电弧增材制造主管平均尺寸偏差为(±0.79)mm。
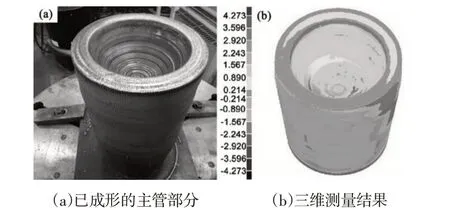
图4 主管成形及三维测量Fig.4 Main Pipe Forming and Three-Dimensional Measurement
将主管堆积至680mm 高后,把主管已成形部分作为支管2的堆积基体,6轴机器人和2轴变位机协同运动堆积成形支管2,堆积方向为支管2 轴线方向,首先堆积支管2相贯区域,然后堆积支管2直壁圆筒区域,该区域采用摆动工艺堆积成形,摆动工艺参数为:单边摆动幅度为11mm,焊枪移动速度为1.3mm∕s,送丝速度为4.7m∕min。已成形的支管2,如图5(a)所示。为分析得到摆动电弧增材制造支管2 平均尺寸偏差为±0.85mm,如图5(b)所示。

图5 支管2成形及三维测量Fig.5 The Forming and Three-Dimensional Measurement of Branch Pipe 2
然后成形支管3,先堆积相贯区域再堆积直壁圆筒区域,堆积方向为支管3轴线方向。成形的支管3,如图6(a)所示。分析得到摆动电弧增材制造支管3平均尺寸偏差为(±0.96)mm,如图6(b)所示。
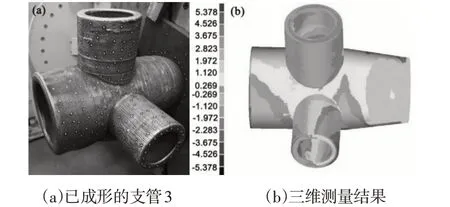
图6 支管3成形及三维测量Fig.6 The Forming and Three-Dimensional Measurement of the Branch Pipe 3
再成形支管4、5,以主管为基体堆积支管4、5三管相贯区域,堆积方向为支管4轴线方向。成形的三管相贯区域,如图7(a)所示。分析得到摆动电弧增材制造三管相贯区域平均尺寸偏差为(±1.18)mm,如图7(b)所示。然后以已成形的三管相贯区域为基体成形支管4直壁圆筒区域,堆积方向为支管4轴线方向。成形的支管4,如图7(c)所示。分析得到摆动电弧增材制造支管4平均尺寸偏差为(±1.22)mm,如图7(d)所示。随后堆积支管5直壁圆筒区。成形的支管5,如图7(e)所示。分析得到摆动电弧增材制造支管5平均尺寸偏差为(±1.27)mm,如图7(f)所示。图7(a)~图7(b)已成形的三管相贯部分及其三维测量;图7(c)~图7(d)已成形的支管4及其三维测量;图7(e)~图7(f)已成形的支管5及其三维测量。

图7 支管4、5成形及三维测量Fig.7 Branch Pipe 4 and 5 Forming and Three-Dimensional Measurement
最后堆积主管剩余部分,最终成形的六向钢节点,如图8(a)所示。六向钢节点三维测量结果,如图8(b)所示。

图8 六向钢节点成形及三维测量Fig.8 Forming and Three-Dimensional Measurement of Six-Directions Steel Nodes
利用Geomagic studio软件分析得到摆动电弧增材制造的六向钢节点整体尺寸偏差为(±1.30)mm,摆动电弧增材制造六向钢节点具有较高的成形精度,这是由于采用摆动工艺堆积时,堆积金属温度分布较为均匀,堆积金属内部应力和变形较小,使得摆动工艺堆积金属具有较高的成形精度。
电弧增材制造六向钢节点堆积金属显微组织,如图9所示。从图中可知,堆积金属组织为细晶铁素体和少量珠光体。六向钢节点堆积金属力学性能,如表2所示。

图9 六向钢节点堆积金属显微组织Fig.9 Microstructure of Deposited Metal of Six-Directions Steel Node
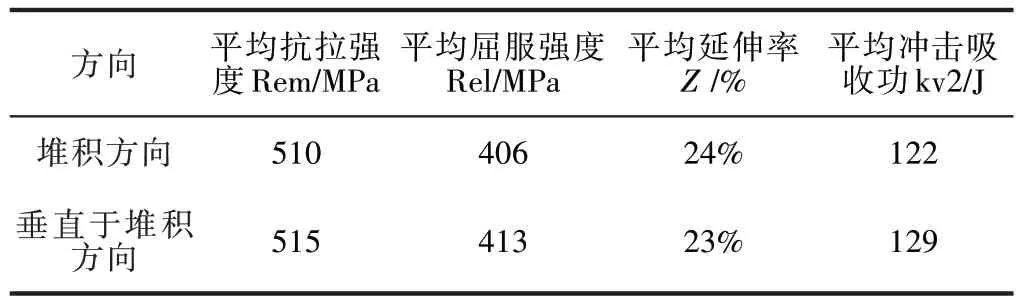
表2 六向钢节点堆积金属力学性能Tab.2 Mechanical Properties of Deposited Metal in Six-Directions Steel Node
从表中可知,摆动电弧增材制造六向钢节点具有高的强度和良好韧性,这是由于堆积金属温度分布较为均匀,晶粒细小[11]。
4 六向钢节点承载性能评价
4.1 有限元分析
利用abaqus软件进行六向钢节点受力状态的模拟分析。六向钢节点为三维空间结构,采用四面体实体单元进行有限元分析,单元类型为C3D4。有限元模拟网格划分,如图10所示。
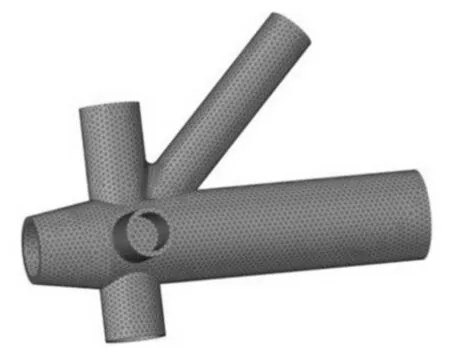
图10 有限元模拟网格划分Fig.10 Finite Element Simulation Meshing
六向钢节点堆积金属基本为各向同性弹性体,试验测得堆积金属物性参数为:弹性模量E为2.02×105N∕mm2,泊松比ν为0.28。有限元分析的边界约束条件和实际工况保持相同。六向钢节点处于复杂应力状态下,在有限元分析过程中采用Von Mises屈服准则。
按照1.3倍设计荷载对各管端部施加荷载,六向钢节点应力有限元分析结果,如图11所示。

图11 六向钢节点有限元分析应力图Fig.11 Finite Element Analysis Stress Figure of Six-Directions Steel Node
从图可知,六向钢节点最大应力为34.4MPa,出现在支管4与支管5相贯区域。六向钢节点承受的最大应力远小于屈服强度,其受力时处于弹性阶段,应力水平较高的区域主要集中在各管相贯区域。
4.2 承载性能测试
根据六向钢节点实际工况下承受载荷情况,选取的试验载荷基准为:1.0 倍恒载荷与0.98 倍活载荷,以及1.4 倍风载荷与0.84倍温载荷。六向钢节点主要承受轴向载荷,在上述载荷工况下,主要考察施加轴向载荷时六向钢节点受力情况。为了使试验载荷更接近于实际工况,试验载荷不小于1.3倍的设计载荷,各管施加的轴向试验载荷,如表3所示。六向钢节点加载方式,如图12所示。

图12 六向钢节点各管加载方式示意图Fig.12 Schematic Figure of the Loading Method of Each Tube of the Six-Directions Steel Node
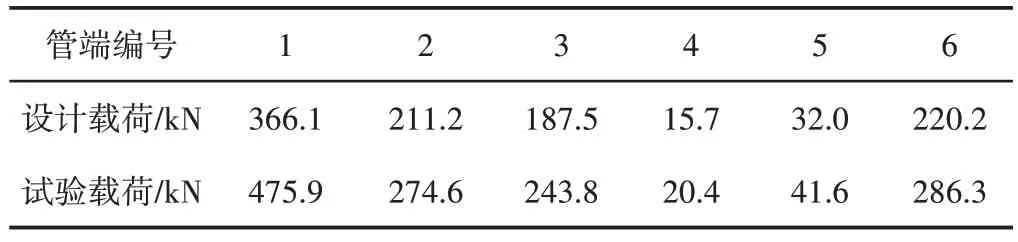
表3 各管施加的轴向载荷值Tab.3 Axial Load Value Applied by Each Pipe
轴力较大的4个管端(1、2、3和6),通过千斤顶直接对其施加确定的荷载;另外2个轴力较小的管端(4、5)直接固定于加载装置,利用试验时六向钢节点自身处于“平衡状态”的特点,实现间接加载。
根据有限元分析结果选取六向钢节点应力较大和应力集中区域作为测试点,测量逐级加载过程中六向钢节点应变数值。六向钢节点应力状态主要包括单向应力和平面应力两种状态,因此试验过程中用到的应变片主要为单向应变片和三向应变花。应变片布置区域为:各管管端各布置3个单向应变片,各管相贯区域选取5个点布置三向应变花,应变花角度分别为0°、45°和90°。应变花位置为H-a,H-c,H-e,H-g,H-j,如图13所示。应变片实际粘贴位置,如图14所示。
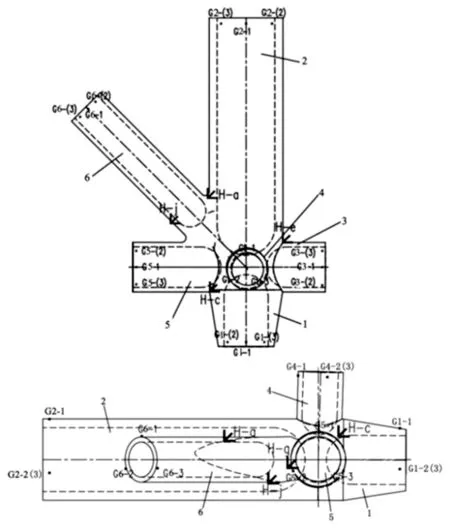
图13 应变片位置分布示意图Fig.13 Schematic Figure of the Location of Strain Gauges

图14 试验装置Fig.14 Test Device
按照上述方案进行六向钢节点承载性能测试。六向钢节点相贯区域布置了5个测试点,每个测试点有三个方向的线性应变值,根据三个方向的应变值可计算出平面内的主应变(包括最大主应变εL和最小主应变εS),计算公式,如式(1)所示。根据计算结果绘制载荷等级-应变曲线,如图15所示。图中纵轴为载荷等级,(1~8)级为加载过程,(9~12)级为卸载过程。
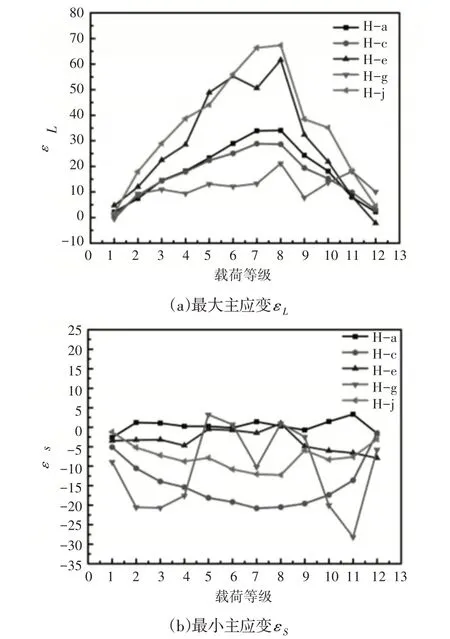
图15 载荷等级-应变曲线Fig.15 Load Grade-Strain Curve
从图15可知,在加载和卸载过程中应变和载荷趋于线性关系,说明六向钢节点始终处于弹性状态,并且卸载后应变趋于归零,说明卸载后基本不存在残余变形。
式中:εL—最大主应变;εS—最小主应变;ε0、ε45、ε90—三向应变片0°、45°、90°方向应变测量值。
根据应变测量值可计算出测试点的应力,从而分析六向钢节点的应力状态,主应力计算公式,如式(2)所示。
式中:E—弹性模量;ν—泊松比;σ1—第一主应力;σ3—第三主应力。
六向钢节点堆积金属基本为各向同性弹性材料,遵循Von Mises屈服准则,根据弹塑性力学理论,可计算出Von Mises应力,计算公式,如式(3)所示。
式中:J2—应力偏量第二不变量。
载荷等级-Von Mises应力曲线,如图16所示。加载过程中,六向钢节点Von Mises应力均不超过37MPa,最大应力出现在支管4与支管5相贯区域,数值为36.7MPa,远小于电弧增材制造六向钢节点堆积金属屈服强度,六向钢节点未发生屈服。测量点载荷等级和Von Mises应力基本趋于线性,在试验过程中,六向钢节点始终处于弹性状态。卸载后,各测量点应力基本归0,说明六向钢节点基本不存在残余应力。
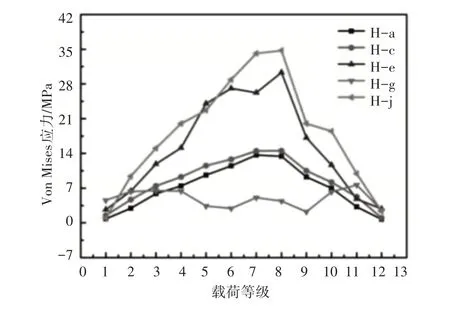
图16 载荷等级-Von Mises应力曲线Fig.16 Load Class-Von Mises Stress Curve
六向钢节点相贯区域H-c、H-e 和H-j三点Von Mises 应力有限元预测值和实测值对比,如图17所示。从图中可知,有限元模型预测值和实测值基本吻合,存在的差异较小,建立的有限元模型能较好地预测六向钢节点应力状态。

图17 应力有限元预测值和测试值对比Fig.17 Stress Finite Element Prediction Value and Test Value Comparison
有限元分析和测试结果表明,电弧增材制造六向钢节点在实际工况下工作时始终处于弹性状态,且最大应力值远小于屈服强度,其具有较高的安全储备。
5 结论
(1)电弧增材制造六向钢节点采用了分区成形、平面切片以及摆动与偏置填充的策略制造,将六向钢节点分为直壁圆筒区和相贯区,相贯区包括两管相贯和三管相贯两种类型,直壁圆筒区采用摆动填充,两管相贯与三管相贯区分别采用轮廓偏置填充与混合路径填充,有效地避免电弧增材制造六向钢节点过程中已成形部分和弧焊枪之间产生干涉。
(2)摆动电弧增材制造六向钢节点堆积金属的组织为细晶铁素体和少量珠光体,其具有高的强韧性,且成形的六向钢节点整体平均尺寸偏差小于(±1.30)mm。
(3)摆动电弧增材制造六向钢节点相贯区域应力较大,最大应力为36.7MPa,远小于堆积金属屈服强度,六向钢节点在实际工况条件下始终处于弹性状态,具有较高的安全储备。
