在预紧力下电信号对舵机模态影响的试验分析
2024-04-26王志浩陈鑫张纯
王志浩,陈鑫,张纯
(1.天津航天瑞莱科技有限公司,天津 300462; 2.北京强度环境研究所,北京 100076;3.西北工业大学航空学院,西安 710072)
前言
模态分析是将线性定常振动方程组变换为一组独立的方程组,求解系统动力响应的过程。实现方程组解耦的变换矩阵,即模态矩阵,它的每列为振动向量[1]。解耦系统在模态坐标下的特征参数为模态频率和模态阻尼[2]。
模态试验技术主要通过建立试验模型,依据模型在试验件上粘贴测点并进行激励,通过测量系统对各点信号进行识别,分析系统传递函数,作为识别试验件模态参数的依据,在模态分析和参数识别技术上得到迅速发展,它在模态分析中占有非常重要的地位。模态试验技术的作用在于:①对试验件理论模型计算的特性进行验证;②将试验件中线性定常系统物理坐标与模态坐标建立联系;③提供试验件频率、阻尼及振型特性,为优化设计提供依据。
在舵机上加载一定的预紧力,使传动机构之间的接触面保持稳定,从而使接触刚度保持稳定,这样可以减少舵面-传动机构-舵机连杆的扭转传动间隙、舵轴与轴承的弯曲方向间隙,使传动机构之间的接触面随预紧力的增加而增大,传动刚度从而提高,得到有效的模态参数。随着预紧力的逐渐增加使测量得到的模态频率向一个稳定值靠拢,这时接触面不再继续增加[3];加载电信号是将一个脉冲宽度为(0.5~2.5)ms 而周期为20 ms的脉冲宽度调制(PWM)信号发送给舵机,当舵机接收到信号后,随即发出脉冲宽度为1.5 ms 的负向标准中位脉冲,将外加信号与基准信号通过比较器进行比对,然后判断它们的大小和方向,从而产生电机的转动信号,直至差值脉冲消失,当标准脉冲宽度与输入脉冲宽度相同时,将会停止转动,并保持舵机的原有位置不变[4]。
该文以A 项目飞行器系统模态试验为蓝本,在0 °舵偏角下,采用施加预紧力和在预紧力基础上加载电信号两种方式,测量飞行器及飞行器上的舵机模态频率、振型、阻尼等参数,探讨加载两种方式对模态参数的影响,为修正理论计算模型提供数据,为舵机及飞行器颤振分析提供模态模型[5,6]。
1 H 飞行器在舵机施加预紧力及电信号下的模态试验
1.1 多自由度系统模态分析理论
弹体试验件一般为具有粘性阻尼的多自由度系统,它的振动微分方程为:
引入x=qφ,φ、q分别为模态矩阵和模态坐标,将上面的方程进行变换,使其成为模态解耦方程:
其中,第r 阶模态方程为:
式中:
由上式可得:
试验件上某点i 的响应为:
假设激励力f p(ω)位于p 点,则模态力为:
把式(6)带入(5)得:
则点i 与p 点之间的传递函数为:
传递函数中包含了试验件的质量、刚度、阻尼等方面的信息,通过模态识别的一些算法可以对传函数据进行处理得到试验件的模态信息。试验模态分析主要是通过测量试验件输入点与输出点之间的传递函数,来获取试验件的动力学特性。
1.2 模态试验
通过激励参数类型和响应传感器类型进行分类,模态试验可分为声腔模式、振动模式等方式,每种方式各有优缺点,本文主要以锤击法的振动模态进行了深入的研究。
锤击法(Hammer Method)是一种快速测试技术,它可以将一个试验件的许多阶模态激发出来,因为瞬态力可以激发的频率范围较宽,从而使试验件产生振动。目前,我们测试中常用的是脉冲锤击激振这种瞬态激励方式,而在脉冲激励应用中,一般使用力锤在试验件刚度较好位置来敲击试验件,并通过获取响应信号进行分析,从而获取试验件动力学特性信息。
H 飞行器由弹体、舵机、翼尖立尾等零部件组成,为了模拟飞行器在空中飞行状态,也就是“自由-自由”状态,进行“自由-自由”边界模拟,由于产品尺寸较长,在试验厂房地基平台上搭建龙门架,产品通过两点水平悬吊方式,每个吊点采用悬挂系统(橡皮绳)悬吊在龙门架上,两个悬吊点选在飞行器试验件横向弯曲一阶频率模态振型节点附近,质心靠近两个悬吊点之间的中点,悬吊安装时使飞行器轴线处于水平位置,并确认其固有频率小于试验件固有频率的1/6[7],调整橡皮绳长度,使飞行器基本保持平飞水平状态,舵机及飞行器粘贴的传感器使用石蜡粘接,采用锤击法使用力锤对舵机及飞行器进行激励,激励点选择在飞行器及舵机刚度较好、能承受和传递集中力的试验件部位[8],一点敲击,然后测量激振力和测点的加速度响应,并计算每一测点的频响函数,最后通过频响函数来识别试验件模态参数。
利用I-deas 软件建立试验件的三维测试模型,模型包括所有测点的几何位置、测量方向和编号。试验时使用64 通道的PXI 动态数采系统采集激励点和响应点测试信号,进行处理获取频响函数,然后使用I-deas 软件模态分析模块进行分析,给出某飞行器以及飞行器上舵机一阶弯曲模态参数,包括模态频率、阻尼等。
2 试验结果
H 飞行器在飞行过程中,舵机在施加预紧力的条件下,有未加载及加载电信号两种工况,为了探究这两种工况对飞行器及舵机在飞行过程中固有频率、阻尼、振型等参数有无影响,对H 飞行器及飞行器上的舵机在两种工况上分别进行模态试验测试,并通过数据分析软件对激励及响应数据进行分析,得到测试结果,对工程应用提供一定的技术支持。
采用I-deas 软件建立飞行器及舵机试验模型,飞行器采用柱坐标系,分为9 个截面,每个截面沿圆周方向均布4 个测点,一共建立36 个测点,其模型如图1 飞行器模型图所示;舵机采用直坐标系,在舵机上表面几何顶端各分布一个测点,共四个测点,模型如图2 所示。

图1 飞行器模型图

图2 舵机模型图
飞行器模态试验测试时,采用锤击法敲击飞行器头部刚度较好位置点,采用8 次平均拟合试验数据曲线,绘制传递函数,并分析试验数据;舵机模态试验测试时,采用锤击法敲击舵机刚度较好位置点,采用8 次平均拟合试验数据曲线,绘制传递函数,并分析其对应的试验数据,在施加预紧力状态下,未加载/加载电信号的传递函数曲线如图3~6 所示,H 飞行器及舵机模态试验测试结果如表1 所示。

表1 H 飞行器及舵机模态试验测试结果
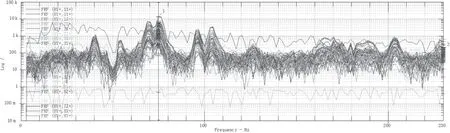
图3 某飞行器传递函数(未加载电信号)
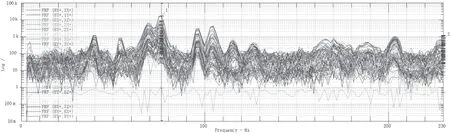
图4 某飞行器传递函数(加载电信号)
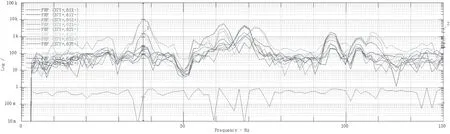
图5 舵机传递函数(未加载电信号)
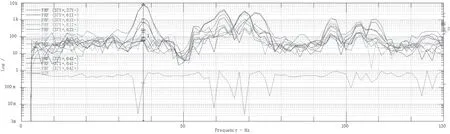
图6 舵机传递函数(加载电信号)
3 结论
通过对上述数据进行对比分析发现,表明只要在飞行器上舵机给定合适预紧力,舵机在未加载及加载电信号两种工况下,飞行器的模态频率变化较小,模态阻尼变化也较小;舵机的模态频率变化较小,模态阻尼变化也较小。两种模态参数的识别,为修正理论计算模型提供数据,为舵机及飞行器颤振分析提供模态模型。
