智慧矿山系统工程及关键技术研究与实践
2024-04-25王国法庞义辉任怀伟杜毅博张建中巩师鑫王丹丹孟令宇孟积渐
王国法 , 庞义辉 , 任怀伟 , 战 凯 , 杜 明 , 张 勇 , 程 健 , 杜毅博 , 张建中 , 巩师鑫 ,王丹丹 , 孟令宇 , 孟积渐
(1.中煤科工开采研究院有限公司, 北京 100013;2.北京天玛智控科技股份有限公司, 北京 101399;3.安标国家矿用产品安全标志中心, 北京100013;4.煤炭科学研究总院有限公司, 北京 100013;5.矿冶科技集团有限公司, 北京 100160)
矿业是现代工业的支柱产业,新一代信息技术赋能新时代矿业加速向数字化、智能化转型,建设智慧矿山是把握新一轮科技革命与变革矿产资源开发利用方式新机遇的战略选择,是保障国家经济持续稳定增长的内在需求,更是保障国家矿产资源安全稳定供给的必由之路,开展智慧矿山建设已经成为世界矿业发展的大趋势[1-3]。
国外部分发达国家在20 世纪60 年代开始进行矿山自动化、数字化相关技术的研发实践[4-5],加拿大、芬兰等国家于20 世纪90 年代制定并实施了智慧矿山计划,并将新一代信息技术延伸应用于工业制造领域,美国于2005 年提出了“聪明加工系统研究计划”,进行数控系统、状态监测系统的研发[6];德国于2013年正式推出了“德国工业4.0 战略”,制定了智能工厂、智能物流与智能生产发展思路[6];欧盟于2020 年提出了面向2030 年的《欧盟新工业战略》[7]。我国于1999年提出了智能采矿的概念,2000 年进一步提出了数字矿山的概念,并逐渐重视对智能感知、智能控制、无人化开采等相关技术装备的研发应用[8-9]。我国数字经济虽然起步较晚,但发展速度较快,2022 年,我国数字经济规模已经达50.2 万亿元,占GDP 比重达到41.5%,2016—2022 年,数字经济年均复合增长14.2%[10-11]。
矿山开发是一个复杂的系统工程,智慧矿山建设需要将新一代信息技术与矿山开发系统进行深度融合,实现矿山开发全流程的智能运行[12]。笔者基于我国智慧矿山建设和技术创新实践,提出智慧矿山系统工程的总体技术架构和智慧矿山系统工程模型,分析智慧矿山建设的数字化基础,深入研究和创新应用地下空间模型重构与动态更新、机器视觉感知和测量、矿山全时空信息感知与闭环管控等关键技术,提出智慧矿山标准体系架构。
1 智慧矿山系统工程概述
智慧矿山系统将矿产资源的开采工艺、装备、流程、管理、运维与新一代信息技术进行深度融合,形成全面自主感知、系统实时互联、多源数据融合驱动、智能分析决策、多系统协同控制、灾害精准预测预警、设备智能运行维护的矿山智能复杂巨系统,实现矿山地质勘探、规划设计、采(剥)掘、机电、运通、洗选、安全保障、生产经营管理等全流程的智能运行[13]。智慧矿山是矿山系统智能与人文智慧的深度耦合,是矿山开发技术发展的新阶段[14-16]。
通过总结凝练近几年智慧矿山建设取得的经验与成效,提出了智慧矿山建设的总体技术架构,将智慧矿山细分为信息感知支撑层(地质-工程信息系统、人-机-环-管感知系统)、边缘计算层、云数据中心、多型网络、矿山智能生产管控平台、矿山智能生产系统、智慧矿山运维管理系统等,如图1 所示。
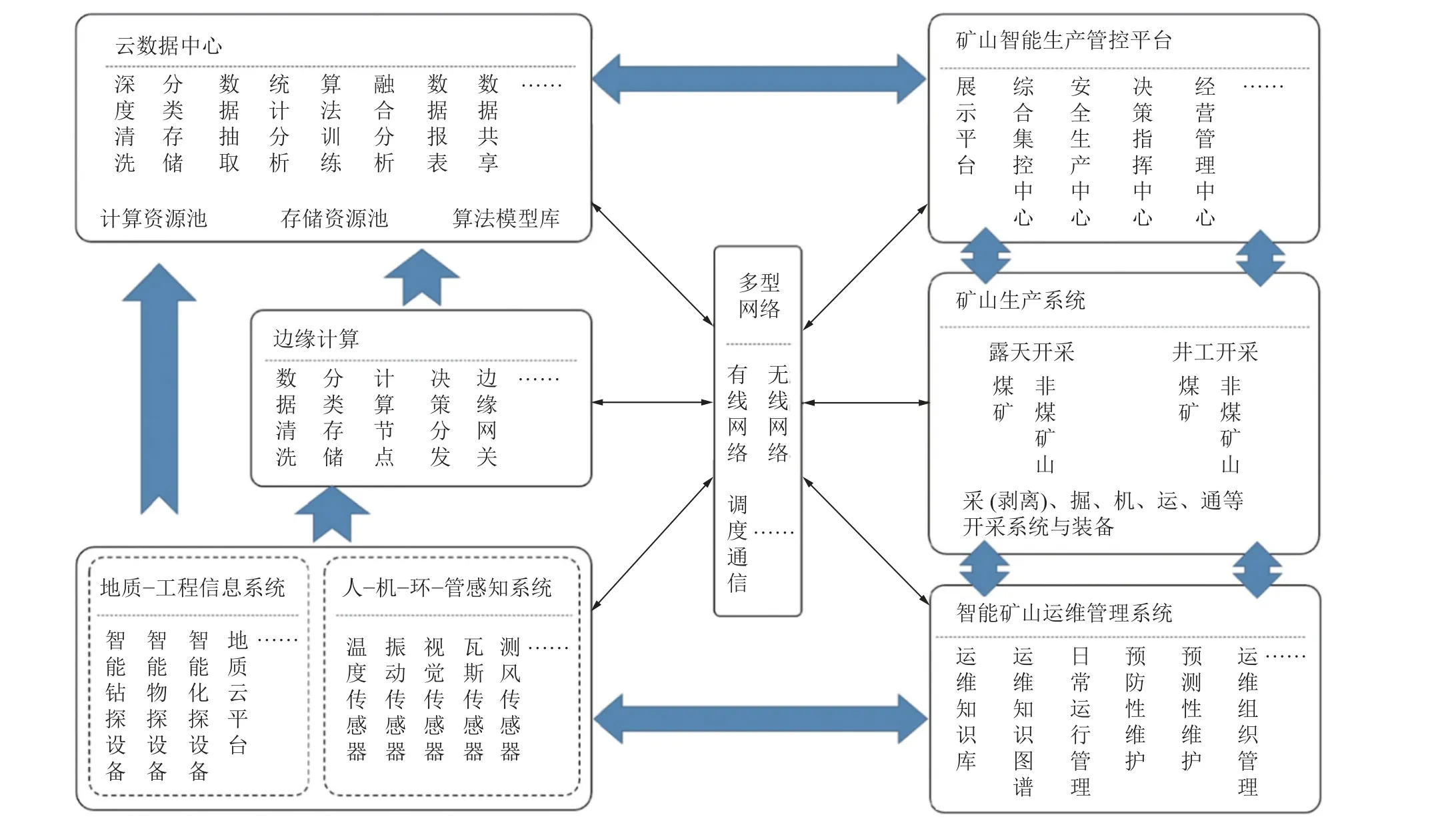
图1 智慧矿山系统技术架构Fig.1 Smart mine system technical architecture
通过地质-工程信息系统的智能钻探、物探等装备对矿山地质信息进行探测,通过地质云平台对地质数据与工程数据进行融合推演及模型构建,形成智慧矿山的资源底图;通过人-机-环-管感知系统对矿山开采过程的各类信息进行采集,为实现矿山智能化开采提供基础信息。采集的各类信息根据应用场景的不同需求分别进入边缘计算层与云数据中心,其中边缘计算层主要对低时延、松耦合、小算力的数据进行处理,而云计算中心则主要用于对算力要求高、数据融合度高、时延要求低的数据进行深度融合分析,并进行数据模型的训练分发及数据的融合共享,为矿山智能生产管控平台提供数据支撑底座。矿山智能生产管控平台与云数据中心进行数据交互,充分发挥云数据中心的数据融合分析共享及系统集成管控的优势,不仅对云数据中心的数据报表及矿山生产场景的相关数据进行集成展示,还对矿山开采过程的采(剥)掘、机电、通风、运输等相关系统进行集中管控,将云数据中心形成的决策指令及生产过程中的调度指挥指令下发至矿山智能生产系统,实现对矿山智能生产系统的协同控制。
根据开采系统的差异,将矿山开发方式分为露天开采与井工(地下)开采,根据矿产资源种类可以分为煤矿与非煤矿山,矿山采(剥)掘、机电、运输、通风、安监、洗选等系统的智能化建设是智慧矿山建设的关键,系统装备的智能化水平及智能生产系统的协同管控能力直接决定了智慧矿山的建设效果。智慧矿山运维管理系统是保障矿山智能生产系统无故障常态化运行的关键,通过对矿山各类设备设施的运行状态进行监测分析,采用故障诊断算法对矿山设备设施进行故障的超前预测预警,采用远程运维、本地运维等方式对矿山智能生产系统进行智能运维,降低系统运行过程中的故障率,提高智慧矿山的常态化运行水平。上述智慧矿山各系统模块通过多型网络进行信息交互,实现各模块之间的数据交互与协调管控。
由于受到矿山智能生产技术、装备、软件平台发展水平及矿山智能生产系统与新一代信息技术融合能力的限制,智慧矿山建设目前仍处于初级阶段,主要存在技术装备的智能化水平不高、系统融合能力不足、对复杂条件适应性较差、采(剥)掘等主要系统的智能化技术装备仍存在瓶颈、数据治理能力不足、5G 应用场景有待进一步挖掘、系统装备的可靠性与适应性较差等问题,亟需在智能化技术、装备、系统、运维、管理、人才等方面进一步突破,提高矿山智能化技术常态化运行水平,实现矿山减人、增安、提质、创效。
2 智慧矿山系统模型与数据基础
2.1 智慧矿山系统工程模型
随着工业智能化进程的不断发展,多源数据呈指数级增长,不同系统之间的数据接口、通讯协议等标准化,以及数据融合分析、治理对智慧矿山统一数字模型的构建提出了新要求,逐渐形成从地面到井下、从工程到管理、从生产到安全等多层次立体信息集成的智慧矿山系统工程模型。
2.1.1 智慧矿山信息实体
提取并抽象物理实体的原始描述,并将其变为物理实体数据描述的过程称为信息实体,具有实体属性和关联属性,实体属性反映信息的表现形式,关联属性表达信息实体在信息网络中的层级和相互之间的关系。
智慧矿山信息类别繁多,相互之间关联关系复杂,涉及多个维度的属性。通过对矿山数据属性和表现形式进行分解,将矿山信息属性分为实体属性、关联属性和时空属性。实体属性对信息实体进行基本描述,包括属性信息、结构信息、功能信息等;关联属性描述信息实体之间的关系属性,包括分组/分类等关联属性、层次关系属性、重要度关系、影响关系属性及行为描述等;时空属性包括基于地理信息的空间方位属性和随时间变化的状态属性等。因此,根据复杂网络理论,智慧矿山信息实体的数学表达可表述为
式中,Oi为第i个信息实体单元;Ei为单元的实体属性,由属性信息P(n) 、结构信息S(n) 、功能信息F(n)组成;Ri为实体的关联属性,由类别属性C(n)、层次属性L(n)等组成;S Ti为实体的时空属性,由时间属性T(n)与U(n)组成。
智慧矿山系统工程模型是一个自底向上构建智慧矿山知识图谱并进行迭代的过程。如图2 所示,对数据进行语义建模,并对复杂任务中的关键节点进行分解,进而构建信息实体;通过融合信息实体之间的连接关系,实现对事实的表达,完成虚实映射。在此基础上,构建实体聚类本体库,推理实体间的新关联,实现知识推理;不断迭代更新形成智慧矿山知识图谱,为各类应用场景提供数据服务并进行决策支持。从异构数据源中抽取信息实体是影响后续知识获取效率和质量最为基础和关键的部分。

图2 智慧系统工程模型构建示意Fig.2 Intelligent systems engineering model construction diagram
2.1.2 智慧矿山知识图谱
通过建立智慧矿山信息实体,实现了智慧矿山系统从物理空间到数字空间的映射,其中物理实体包括采煤机、刮板输送机、掘进机等各类设备,时间实体包括顶板运移、瓦斯超限、设备故障等随时间的变化,功能实体包括空间位置关系、围岩耦合关系等。
为了完善功能实体的推理关系,构建了智慧矿山知识图谱。通过Apriori 算法对各信息实体之间的关联规则进行挖掘,计算支持度和置信度,描述关联程度。在此基础上,聚类定义开采行为相关的本体类别,划分类的层次结构,并定义本体的边界和约束,构建基于开采行为的智慧矿山领域本体,建立智慧矿山各层次内部与外延对象间的逻辑关系模型。
在上述基础上对任务进行分解。任务T可分解为四元组:
式中, TaskSet={T1,T2,···,Tn}为根据本体知识库分解得到的子任务集合; State={S1,S2,···,Sn}为完成任务过程中处于的基本环境信息;Action={A1,A2,···,An}为各智能体完成任务所进行的行为决策;QSet={Q1,Q2,···,Qn}为完成子任务所需查询的环境信息集合。
2.1.3 智慧矿山数据共享
通过各类传感器、设备和软件采集并处理生产过程中所产生的大量数据,利用人工智能和大数据技术,根据实际需求进行统计、挖掘、分析和预测,将结果推送至相关系统,提供最优的数据服务方案,如图3 所示,实现智慧矿山数据资源的共享交互及矿山企业全面的生产信息化管理,提高生产效率和安全性。
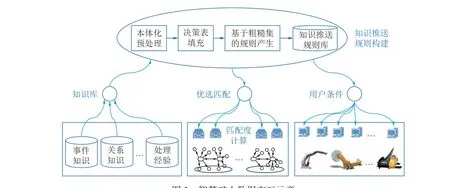
图3 智慧矿山数据交互示意Fig.3 Data active push schematic for smart mine
智慧矿山数据资源的共享与矿山生产运营的各个业务需求密切相关,分为显性需求和隐性需求两个时间维度。显性需求:成员依据自身需要通过数据资源共享服务平台,提出数据请求;隐性需求:根据以往数据共享服务历史以及知识库中的逻辑规则,挖掘需求者的隐性需求主动推送。因此,基于智慧矿山业务需求,对任务进行分解,得到控制决策的本体知识。基于检索条件对开采信息知识本体进行匹配度计算,得到推送最优解;对于隐性需求,基于粗糙集和模糊综合决策构建推送规则,并根据关联关系进行匹配度计算,约减属性决策表,将匹配数据推送给控制对象,并将控制结果和数据习惯记录进行规则迭代,解决推送信息和目标的交互、融合问题。
2.2 智慧矿山数据基础
数据基础是以数据创新为驱动、通信网络为基础、数据算力为核心的基础体系。数据基础涉及5G、大数据、云计算、物联网以及工业互联网等新一代信息技术,以及基于上述技术形成的各类数字平台,服务矿山企业生产运营的各个方面;如图4 所示,以煤矿液压支架群数字模型为例,发布支护任务后,接受的多维数据,通过知识本体分析预处理,并推理和决策优化,对设备本体进行状态修正和优化。
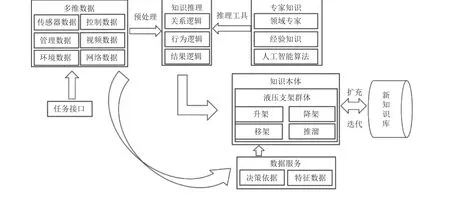
图4 智慧矿山液压支架群数字逻辑模型Fig.4 Smart mine hydraulic support group digital logic model
(1)通信网络。智慧矿山的数据基础依赖于强大而稳定的通信网络。在智慧矿山生产运行过程中,大量的数据需要及时传输和处理,比如设备状态监测信息、生产数据信息等。因此,需要高速、可靠的通信网络为矿山内各设备、系统和人员之间的信息交互提供保障。现阶段,智慧矿山通信网络涵盖有线网络和无线网络,如光纤通信、LTE、WiFi 等,确保信息的实时传输和远程监控。
(2)大数据。智慧矿山在生产经营管理过程中会产生大量的数据,包括生产数据、设备状态、环境监测等,这些数据包含了丰富的信息,但仅凭人工难以发现其中的规律和价值。大数据技术能够处理这些庞大的数据,进行数据挖掘和分析,从中找出规律和关联,为矿山管理和生产提供决策支持。例如,通过分析设备运行数据,可以预测设备故障并进行维护,避免生产中设备故障和资源浪费。通过对矿产资源属性数据进行分析,可以优化选矿过程,提高矿产资源的回采率。
(3)云计算。智慧矿山涉及的数据量很大,传统的本地计算和存储往往无法满足需求,而云计算为智慧矿山的数字化提供了强大的计算和存储能力。云计算通过将计算和存储资源集中在云端,矿山只需通过网络连接访问云服务,就可以实现大规模数据处理和分析。同时,云计算可以根据实际需求灵活调整计算资源,使得矿山能够按需分配资源,避免了资源的浪费。此外,云计算还可以为矿山提供数据备份和容灾服务,保障数据安全。
(4)物联网。物联网技术是智慧矿山数据基础的核心组成部分。通过在矿山设备和机器上安装传感器和通信设备,物联网可以实现设备之间的连接和信息交换。这样的智能化设备和系统构成了智慧矿山的神经系统,可以实现智能化生产和运营。如果设备出现故障或异常,物联网系统会及时发出预警,提高了矿山设备运行的可靠性和安全性。
(5)工业互联网。工业互联网是智慧矿山数据基础的关键环节,它将物理世界和数字世界紧密连接。工业互联网通过物联网、云计算、大数据等技术,实现矿山内外设备和系统之间的互联互通,打破信息孤岛,提高矿山的智能化水平。工业互联网还可以实现矿山内外信息的共享和协同。在智慧矿山中,不同的设备和系统之间需要相互协作,实现生产过程的优化。通过工业互联网,矿山内的设备可以与供应商和客户系统进行连接,实现信息共享和资源协同,进一步提高企业的整体效率和竞争力。
(6)智慧矿山机器人。机器人是智慧矿山数字化的重要组成部分。它们能够自动完成采矿、运输、巡检等任务,减少人力投入,提高生产效率和安全性。智慧矿山机器人具备自主导航、感知决策和自适应等功能,使得矿山生产更加智能高效。
3 地下空间重构与模型动态更新
地下空间重构的主要任务是以机器视觉传感数据为主,其他传感数据为辅,构建矿山井下场景的三维视觉空间模型,主要包括稀疏重建、稠密重建、空间表示和纹理贴图4 个模块,地下空间重构流程如图5 所示。
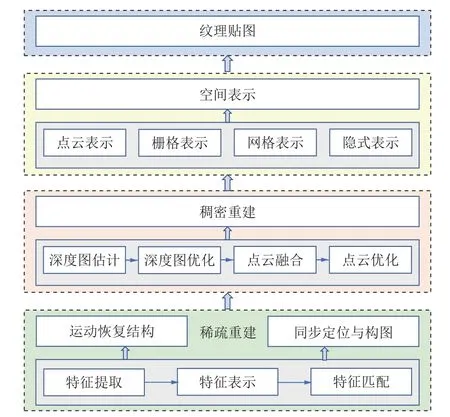
图5 地下空间重构流程Fig.5 Underground space reconstruction process diagram
稀疏重建是在特征提取、表示和匹配的基础上进行传感器位姿的估计和稀疏三维点云的获取,主要包括2 种实现方式:① 运动恢复结构(Structure from Motion,SFM),是一种离线稀疏重建方法,具有精度高但计算时间长的特点;② 同步定位与构图(Simultaneous Localization and Mapping,SLAM),是一种在线稀疏重建方法。
SFM 与SLAM 均通过最小化式(3)的投影函数E来进行位姿和地图的优化。
SFM 优化全局所有三维点,具有较大的计算量,一般进行离线计算,而SLAM 仅在线优化局部三维点,当检测到闭环时,才在后端优化闭环上的所有三维点。典型的SFM 工作包括VisualSfM[17]、COLMAP[18]等,典型的SLAM 工作包括PTAM[19]、ORBSLAM[20]、LSD-SLAM[21]等。
稠密重建基于稀疏重建得到的传感器姿态,利用多视图关系,估计、优化深度图,进而实现点云融合与优化,最终获取三维稠密点云[22]。在稠密重建的基础上,空间表示主要有4 种形式:① 点云表示[23],直接以点坐标的方式表示三维空间;② 栅格表示[24],以二维或三维离散网格的方式表示三维空间;③ 网格表示[25],主要以三角网格的方式表示三维空间;④ 隐式表示[26],以神经网络的方式表示三维空间。其中隐式重建是解决挑战性环境下空间重构问题的一种非常有前途的技术,是当前空间重构的一个研究热点。它采用神经网络来表示场景,接收3D 坐标和方向,输出该空间位置处的颜色和体密度,式(4)为其体渲染方程。

最后,通过纹理贴图技术[27]获取场景带颜色的空间重建模型。上述空间重构相关方法在地面航拍、街景、大型建筑设施等场景已经进行了广泛有效应用[28]。
针对智慧矿山应用场景的空间重构问题,一些科研机构进行了初步研究,例如,澳大利亚CSIRO(Commonwealth Scientific and Industrial Research Organization)的ExScan,提出了毫米波雷达点云重建方法和LeGO-LOAM-SC 定位与构图方法[29-30]。上述方法仍然以激光或毫米波雷达为主,虽然能够获取矿山井下巷道的三维点云,但是由于矿山井下巷道既窄又长,几何特征单一,点云容易变形,出现较大误差,如果依赖井下特有的测绘信息进行校正,点云获取的效率又非常低,人力与时间成本非常大。通过引入视觉信息能够有效解决激光或毫米波雷达在空间重构中几何退化导致点云变形的问题。
为了应对矿山井下几何退化、环境照度低、照度不稳定、纹理缺失、纹理重复、多粉尘、多水雾、GPS信号缺乏等不利因素的影响,提出了一种矿山井下场景三维视觉与空间重建框架,如图6 所示。该框架以可见光/红外光视觉数据为主,辅以激光、UWB、IMU等数据,通过设计多传感器时空标定理论、噪声抑制策略,实现数据的融合增强,获取高质量视觉图像,在此基础上,进行典型目标的精准识别和矿山场景空间模型的高效重建。此外,可以引入深度网络匹配方法进一步提升稀疏重建过程中位姿和稀疏点云的精度,通过深度神经辐射场有效表示场景空间,实现矿山井下场景重构的高保真渲染。
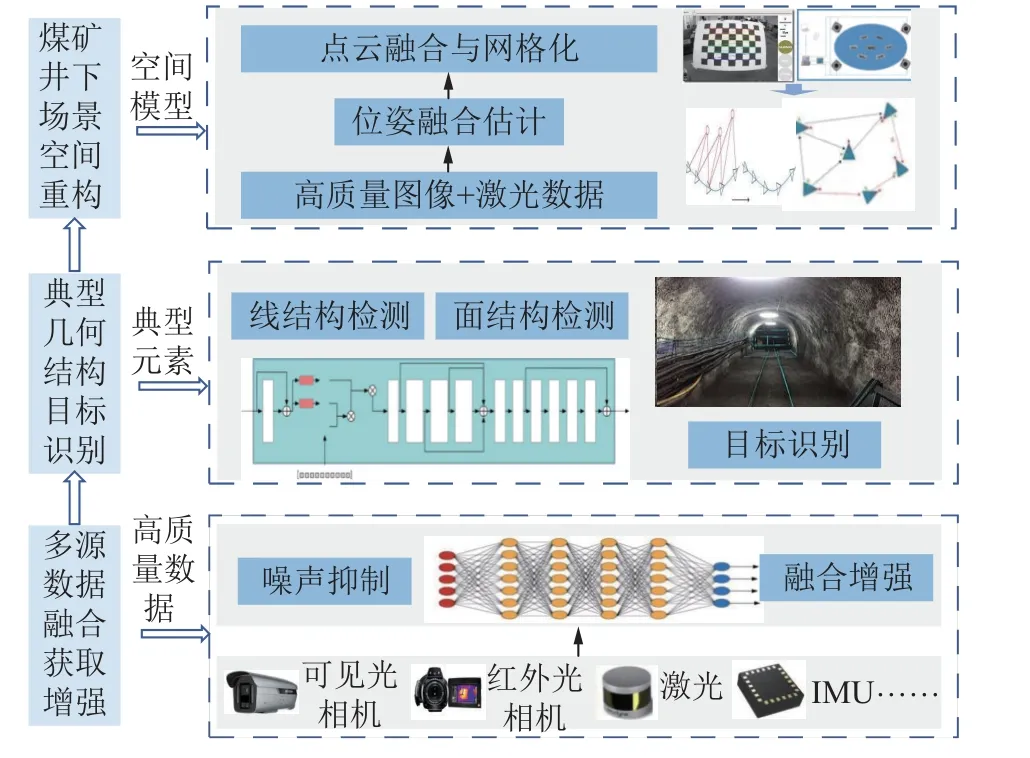
图6 煤矿井下空间重构框架Fig.6 Framework of underground space reconstruction in coalmine
4 地下复杂环境机器视觉测量技术
机器视觉将人工智能、深度学习、光学传感等技术与矿山实际生产进行深度融合,通过构建视觉作业场景分析模型,以可视化实时分析的方式代替现场工人长时间稳定地监测生产状况,应用于矿山生产各环节,尤其是井下生产,实现对矿山采掘、探放水、瓦斯抽采、运输等作业场景的一体化智能感知、智能决策、设备联动控制和运维人员智能调度,有效降低事故率,提高设备开机率,减轻工人劳动强度,从而达到作业现场“少人化、无人化”的安全生产目标。
4.1 液压支架单设备位姿检测
位姿检测是实现装备自适应精准控制的基础要素,可具体分为姿态识别和位姿测量。装备姿态识别指利用视图数据进行特定目标状态的辨识,而位姿测量是在姿态识别的基础上对视图信息进一步深入感知,得到精确的位置信息和姿态角,从而为后续装备姿态的精准调控形成反馈机制,提高生产的柔性和自动化程度。以煤矿液压支架的位姿检测为例,传统的液压支架姿态测量是通过接触式的倾角传感器实现,相对而言成本较高,而且很难实现对液压支架整体姿态的测量,而基于机器视觉的测量方法采用非接触式方式进行测量,能更好地适应煤矿井下设备振动、移动等场景,提高测量精度[31]。
将RGB-D 相机安装于液压支架顶梁上,实现对液压支架的支护高度、顶梁相对于底座的姿态角(包括俯仰角、方位角、翻滚角)进行测量,将顶梁与底座的运动视为两个刚体之间的相对运动,通过顶梁与底座的相对空间位置来反映二者的姿态变化。根据视觉测量原理和欧式变换理论,建立如图7 所示的液压支架姿态视觉测量模型[32](图7 中,H0i为液压支架支护高度;Δz0为相机与支架顶梁上表面的距离;L1为相机与支架顶梁前端的距离;L2为相机与支架顶梁后端的距离)。首先,将k时刻作为液压支架运动的初始时刻,对液压支架支撑高度和顶梁姿态角参数进行初始化。利用深度相机采集到k时刻的彩色数据与深度数据,获取液压支架底座上表面中3 个共面特征点,并得到其在RGB-D 相机坐标系下的空间三维坐标Pk1(x1,y1,z1)、Pk2(x2,y2,z2)、Pk3(x3,y3,z3),并由此构建液压支架底座上表面平面方程;然后利用平面法向量n求出支架底座在相机坐标系三轴方向的夹角,即为顶梁姿态角初值αk、βk、γk;根据点面的距离公式求出相机坐标原点与底座上表面的垂直距离,并结合顶梁与相机的空间相对位置关系解算出支撑高度初始值Hk。初始化完成后,利用相邻时刻图像中匹配好的3D 点对估计相机的运动,实现液压支架运动过程中姿态变化的解算。通过空间3D-3D 的ICP 模型和最小二乘法构建k时刻与k+1 时刻图像中对应点群Pki、Pki+1之间的线性优化目标函数,求解k时刻与k+1 时刻图像间的旋转与平移变换,实现k+1 时刻液压支架顶梁姿态角αk+1、βk+1、γk+1与支撑高度Hk+1的解算。
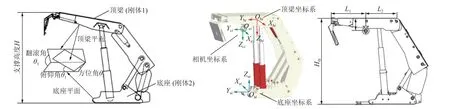
图7 液压支架姿态视觉测量模型Fig.7 Visual measurement model of hydraulic support posture
4.2 综采装备(群)姿态同时空测量
以煤矿的综采工作面为例,综采工作面装备种类多、数量多,且装备间均为灵活度较高的弱连接关系,姿态极易受到复杂地质环境的影响。综采工作面装备位姿测量缺乏统一的参照、测量系统不全面,同时准确获取同一时刻多装备位姿状态要求多传感器之间必须保持较高的同步性,传统技术尚难以解决多装备协同联动位姿测量问题,而机器视觉测量感知技术具有同时间基准、多位姿同步测量和多类型信息同步获取等优势,能够进一步解决煤矿井下综采工作面全时空同步感知测量难题。
综采装备(群)姿态同时空视觉测量的核心是结构化细粒度辨识和基于装备标志物的位姿提取。结构化细粒度辨识采用基于Transformer 架构的分割模型,如图8 所示。该模型包含图像编码器、提示编码器和掩码解码器。受到可扩展性和强大的预训练方法启发,图像编码器使用了一个MAE 预训练的Vision Transformer(ViT),最小化地适应处理高分辨率输入。提示编码器采用密集掩码方式,使用卷积嵌入,并与图像嵌入元素相加。掩码解码器通过有效地将图像嵌入、提示嵌入和输出token 映射到掩码来实现。基于装备标志物的位姿提取采用基于标志物已知结构尺寸的成像几何关系转换,如图9 所示。根据结构化辨识的结果提取已知尺寸的标志物,通过已知尺寸的3D-2D 视图几何映射关系,实现标志物的位姿求解。
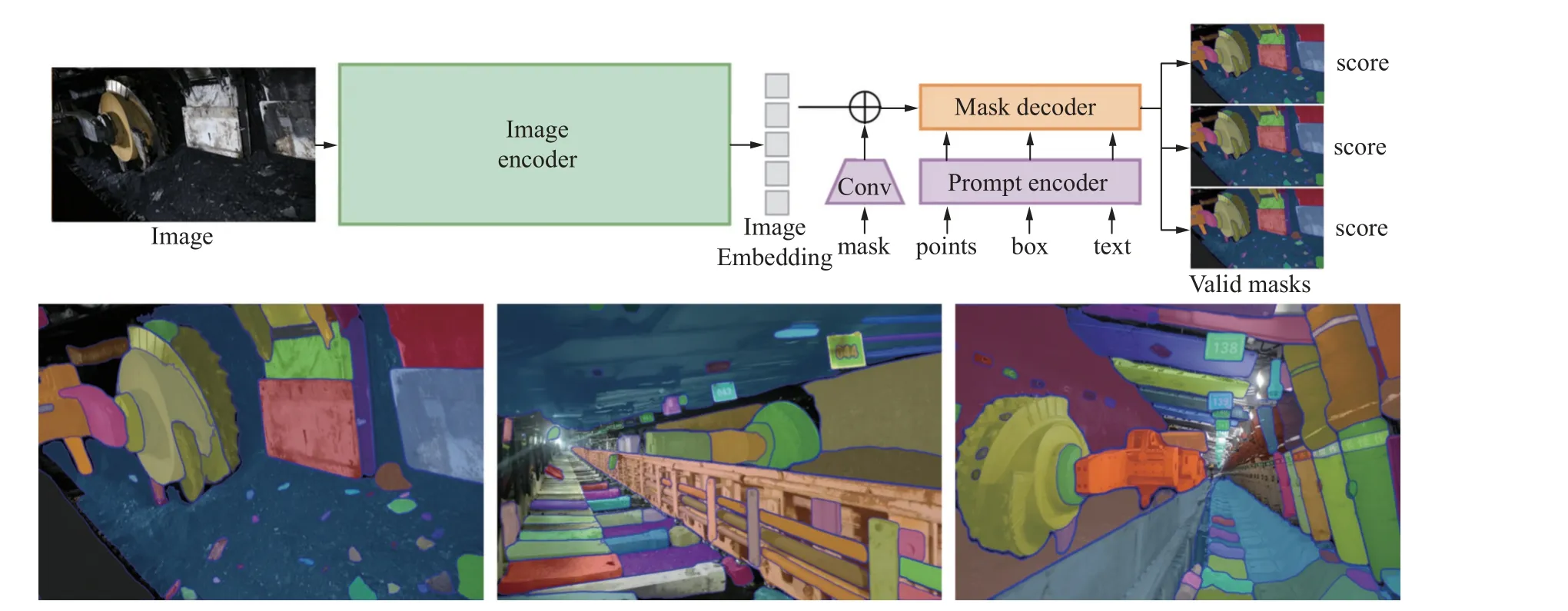
图8 基于分割的综采装备(群)结构化细粒度辨识Fig.8 Structural fine-grained identification of fully mechanized mining equipment (group) based on segmentation
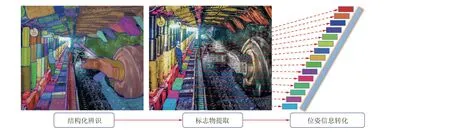
图9 基于装备标志物的位姿提取Fig.9 Pose extraction based on equipment markers
4.3 煤岩分界面识别
煤岩分界面识别是实现工作面智能化开采的关键技术,可以根据采煤过程中煤和岩石的分布情况来及时调节采煤机滚筒的高度和牵引速度,以达到采煤机跟随煤层变化自适应截割的目标。然而,准确快速识别截割过程中煤层与岩层的分界线,一直以来都是煤炭开采领域内公认的技术难题[33]。
基于视图的煤岩分界面提取流程一般可分为图像噪声预处理、图像分割、形态学处理、轮廓提取、分界线提取。工作面煤壁图像中,煤和岩石相互干扰,岩石部分图像亮度通常较高,煤体部分亮度稍低,同时煤体中存在大量高亮度噪点,采用双边滤波算法对图像边缘特征进行强化,同时采用中值滤波算法对图像进行去噪,并弱化细小边缘部分。煤岩图像中,存在光照部分不均匀,采用全局分割的方式难以将煤岩全部区分,造成图像区域断裂、区域标记不齐等。为了更有效和精细的提取轮廓信息,采用自适应阈值分割算法进行处理。自适应阈值分割算法可以很好的将图像中岩石区域的轮廓提取出来,结合全局阈值分割,可以定位岩石区域全部细节。通过图像形态学算法对阈值分割结果进行滤波处理,断开非连接部分、闭合合理的轮廓和滤除部分细小轮廓。通过对形态学处理结果进行轮廓提取,可以得到视图中的有效轮廓信息,结合轮廓大小滤波和全局阈值分割结果,可以得到岩石在煤体中的边界轮廓信息,提取的结果为一个封闭轮廓。由于岩石与煤的分界,以及切割的分界,在竖直方向上具有较大的梯度,在轮廓的竖直方向上进行梯度运算,可以得到煤岩的分界线(蓝色)和滚筒的切割线(红色),如图10 所示。
图10 基于视图的煤岩分界提取Fig.10 View-based extraction of coal-rock boundary
5 井下瓦斯环境下射频引爆风险分析
煤矿井下瓦斯爆炸环境中使用的射频电磁能需要符合防爆基础标准GB/T 3836.1—2021《爆炸性环境第1 部分:设备 通用要求》中的功率限制要求:即对于9 kHz~60 GHz 的连续射频电磁波,在I 类爆炸环境安全使用的阈功率不得超过6 W。根据标准要求,目前对5G 基站防爆安全评估时,采用EIRP(等效全效辐射功率)对基站功率进行限制,即发射天线端口功率与天线增益之和不得超过6 W;除此之外,针对同一基站具有多根天线的情况,要求多端口阈功率代数和不超过6 W,5G 基站功率严格受限。突破功率限值是5G 技术在煤矿井下推广应用的热点和难点问题。
5.1 现行标准试验方法分析
防爆标准对射频阈功率的限制主要来源于20 世纪七八十年代英国的研究成果,对射频电磁能防爆安全阈值主要试验步骤是:① 构建50 Ω 纯阻性电路,接入IEC 标准火花台;② 作出假设,火花阻抗与天线内阻阻抗匹配;③ 测量火花电压V,根据假设计算火花功率:Pm=U2/(8R) ,其中,R为电路的内阻;Pm为6 W评价指标来源。
首先可以看出评价指标是在假设条件下的计算值而不是测量值,其次相关试验方法与安全阈值还存在以下问题:① 安全限值不适用5G 频段。随着电磁波频率的升高,放电特性发生重大改变,但标准却直接将30 MHz 以下的试验结果推广应用到60 GHz 高频。② 相关试验方法也不适用于5G 技术,标准火花台要求试验频率不得超过1.5 MHz,其主要原因是随着电流频率升高,电磁波能量发生反射现象;寄生电容和寄生电感随着频率的升高而产生,很难构建50 Ω纯阻性电路,这都导致了电路中能量大部分将被辐射或反射消耗而无法用来产电火花。③ 相关评价指标存在极大的安全系数,其主要原因是标准评价指标是匹配负载最大功率,而6 W 限值是射频源的阈功率,中间还存在多个的损耗链路,其次,假设的合理性也有待商榷。
5.2 射频电磁能防爆试验方法设计
射频电磁能在瓦斯/甲烷混合气体中引起碰撞电离、电晕放电等物理过程所需要的电场强度高达百万伏米(略低于常态空气),正常情况下,煤矿井下用于信号传输的电磁波在空间中分布的电场强度无法达到此量级,但是电磁波却可以利用有限的电压在极小的间隙内产生极大的场强,并将能量以电火花的形式释放出来,此时就存在引燃瓦斯气体的风险。总的来说,煤矿井下用于通信的5G 电磁波引燃瓦斯气体需要满足以下4 个条件:① 煤矿井下存在金属构件可以与空间中的电磁波产生谐振;② 金属构件上存在非连续点作为放电间隙;③ 间隙电压满足放电击穿条件;④ 放电火花能量大于瓦斯所需要的最小点燃能量。
受上述不同频率范围的击穿机制影响,放电击穿电压也将发生相应的变化。特别是在高频电场中,击穿电压(峰值)Vst不仅是气压p与极间距d乘积pd的函数,也是频率f与极间距乘积fd的函数,即
如图11 所示,5G 电磁波在不同频段具有不同的最小击穿电压与最小功率安全阈值。
图11 大气压下氮气在微米间隙下的击穿特性Fig.11 Breakdown characteristics of nitrogen at micrometer gap at atmospheric pressure
即依据上述分析结果,并解决现行标准依据的技术条款所存在的主要问题,基于半波偶极子天线设计了原理如图12 所示的射频电磁能防爆专用试验装置。
图12 射频电磁能防爆专用试验装置Fig.12 Rf-electromagnetic energy explosion-proof special test equipment
5G 常用典型频段主要包括700 MHz、2.1 GHz、2.6 GHz 和3.5 GHz,笔者以700 MHz 频率为例,半波偶极子天线长度约为21 cm,为了保证更佳的谐振性能,考虑天线两臂间隙对S参数的影响,本次仿真选取的间隙为12 mm。
根据仿真情况,指导700 MHz 射频电磁波专用防爆试验装置的设计。根据收发天线的互易性,以及减少射频源的使用成本,采用在发射端进行试验,所设计的电路主要由射频源、保护电、测量电路、爆炸试验装置四部分组成。
在现有试验装置与试验平台上进行了试验,射频电磁波造成的放电火花与射频电磁波造成的瓦斯引燃现象如图13 所示。
图13 射频电磁能产生的电火花与引燃瓦斯气体瞬间Fig.13 Electric spark generated by electromagnetic energy and the instant of gas ignition
射频电磁能(信号波形为700 MHz 正弦波)瓦斯引燃试验结果如图14 所示,当射频能量到达一定阈值时,瓦斯气体就会被引燃并发生爆炸现象。在功率测量电路上记录了瓦斯引燃时的正向功率和反向功率试验数据,并计算出馈入功率结果。在2 次独立的试验中,测得正向功率的最小数据为49.6 W、馈入功率的最小数据为24.8 W,考虑爆炸试验的或然率,将功率以0.1 W 的步频降低,满足6 400 个火花点未发生瓦斯引燃现象,由此认为上述试验数据可靠。若采用射频领域常用功率计算方法,将馈入功率作为安全阈值评价指标,则是将试验装置作为集总端口进行分析;若考虑微观层面放电间隙电压产生的驱动源,则应以正向功率作为安全阈值评价指标,即按目前的理论分析结果,采用正向功率作为安全阈值评价指标更加合理。采用信号波形为5G NR 的射频电磁波,目前测试结果为正向功率86.1 W,反向功率为29.8 W,但是试验数据量还有所欠缺,无法得出5G NR 射频电磁波相较于正弦波具有更高的功率安全阈值。值得注意的是,本文是在发射端进行分析,即未考虑电磁波在空间中的损耗问题,但是由于煤矿井下发射天线是裸露在外的,所以发射天线是最危险的部分,如果能采取有效措施对发射天线进行保护,基站发射功率还可以进一步增大。
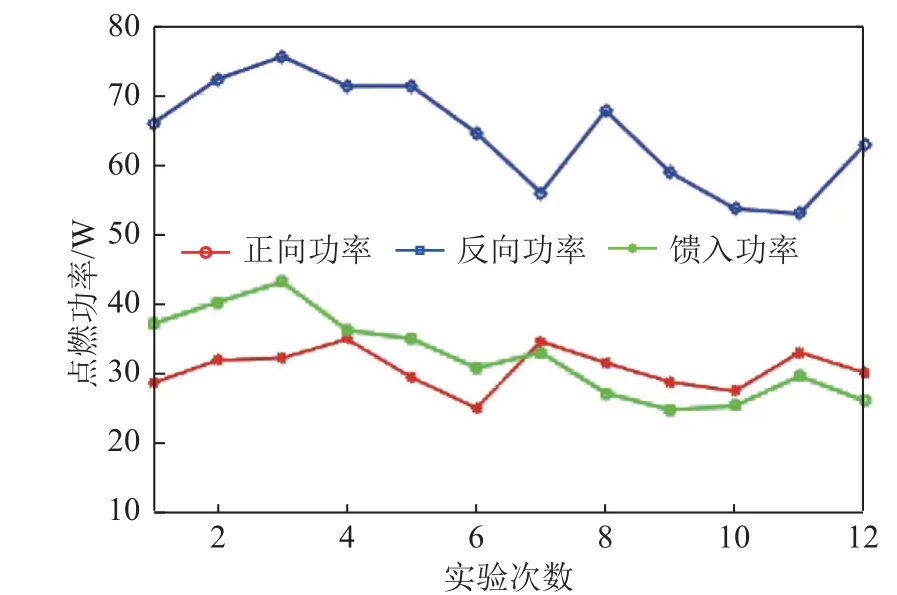
图14 射频电磁能甲烷点燃试验结果Fig.14 Results of methane ignition test with radio frequency electromagnetic energy
考虑能量守恒定律和弗里斯传输方程,在本试验方案下得出的安全阈值,继续采用EIRP 限制功率是不合理的,可以直接采用基站端口有效功率作为安全限值。在一定安全系数的条件下,至少可以将700 MHz频段基站功率限值由阈功率6 W 提升到端口功率20 W以上,此时,单基站有效覆盖范围将呈现倍数增加。上述试验结论则主要针对单端口基站,对于在煤矿井下应用的多端口基站,如何取叠加安全系数还需要进一步分析。针对2.1、2.6 和3.5 GHz 等其他频段,由于5G NR 基带波形、电磁波传输特性和放电特性都发生了改变,还需要深入研究才能确认相关安全阈值与评价方法,已经可以确认随着功率安全限值的提高,5G 技术在煤矿井下获得高效使用的前景是非常乐观的。
6 全时空信息感知与闭环管控系统
6.1 矿井全时空信息感知技术架构
经过多年的研发实践及安全生产经验总结,对传统的水、火、瓦斯、顶板、粉尘、冲击地压等灾害防治有了一定的认识[34],但仍然存在致灾机理不明确、灾害信息感知不够全面精准、数据融合分析程度低、灾害预测预警算法缺失、灾害防控体系不完善等问题。
矿井全时空信息感知与闭环管控系统是针对矿井水、火、瓦斯、顶板、冲击地压、粉尘等矿井灾害,利用物联网、大数据、人工智能等技术对传统灾害防治技术进行智能化升级,赋予煤矿灾害防控系统灾害信息主动感知、防控方案自主决策与防治装备智能控制的能力,形成感知-决策-控制-反馈的闭环运行模式,实现矿井灾害的超前治理、态势预警与智能防控,系统架构如图15 所示。
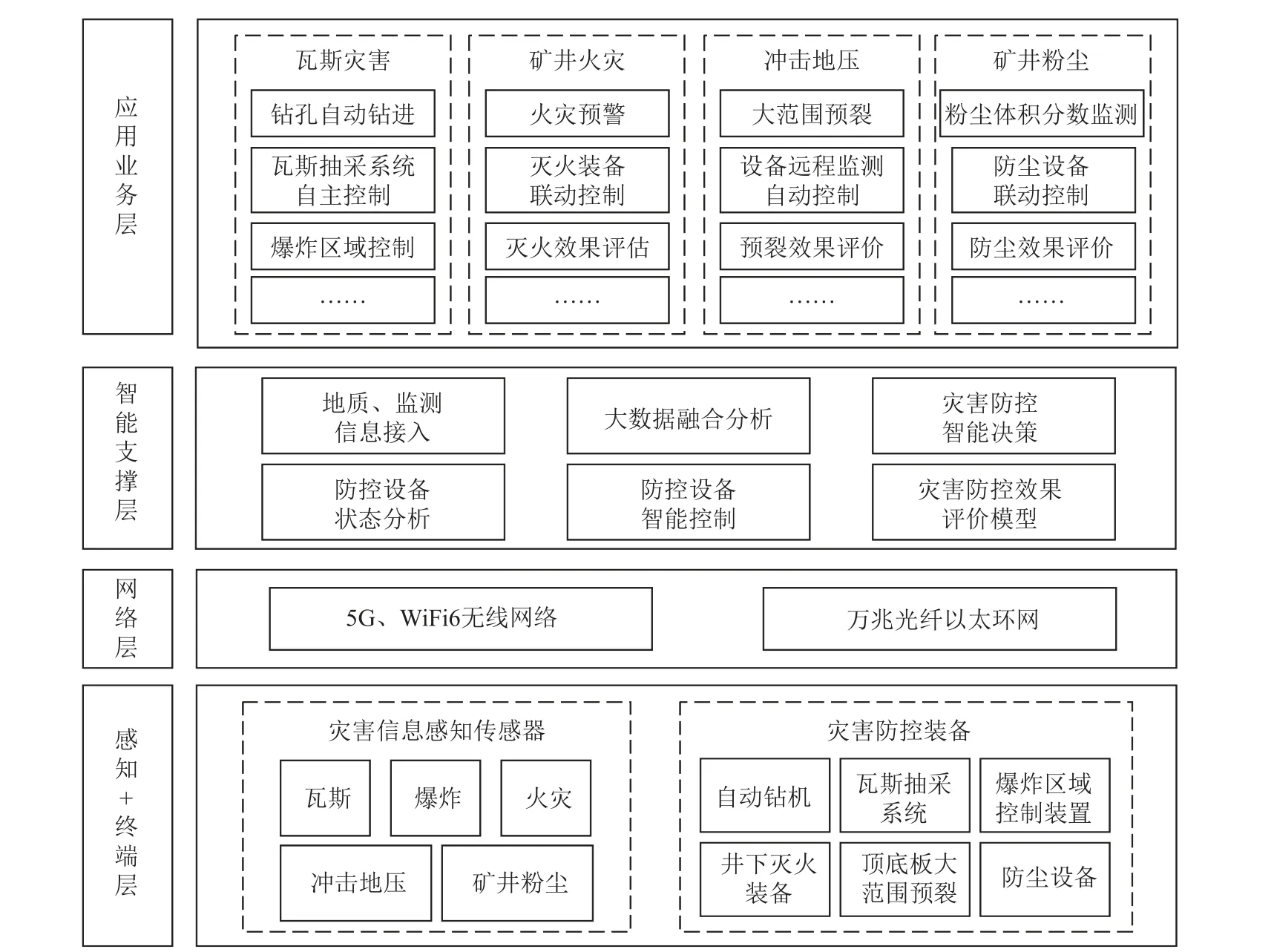
图15 矿井全时空信息感知系统总体架构Fig.15 Overall framework of mine spatiotemporal information sensing system
感知控制层位于系统架构的底层,负责煤矿灾害相关信息的感知和防控指令的执行,由灾害信息感知单元和灾害防控单元构成。灾害信息感知单元采用各类传感器、音视频采集终端等方式获取各类灾源参数、环境信息、设备工况等信息;灾害防控单元为各类灾害防控装备构成,接收控制指令并自动完成灾害治理作业。
网络传输层位于感知控制层与智能支撑层之间,是感知数据、控制指令等信息的传输链路,综合5G、WiFi6 无线网络和万兆光纤环网构建多网融合平台,实现灾害防控各类信息的超带宽、低延时、高可靠的准确传递。
智能支撑层是煤矿灾害智能超前防控系统核心层,负责多源、多维度灾害防控信息的融合、管理,采用基于防控机理与数据驱动结合的方法建立灾害防控决策、防控效果评价等模型,对海量数据进行挖掘,为各类灾害防控应用提供支撑。
应用业务层是各类灾害超前防控功能的管理层,根据灾害防治的业务需求,在智能支撑层的协同下具备防治方案设计、设备工况控制与防治效果反馈功能,并能进行多灾种间的协同防控,最终实现煤矿灾害超前防控的智能设计、自动作业和协同管理。
6.2 矿井全时空信息感知与融合预警技术
煤矿井下人、机、环等信息感知是进行灾害预测、预警的基础,致灾信息的全面、实时感知及融合分析预测是实现灾害防治的关键。矿井全时空信息反馈安全闭环管控技术是在精准感知灾害相关信息的基础上,建立多层次、多维度、多参量预警指标体系,采用成因机理和数据驱动互馈的灾害风险辨识方法,进行灾害信息自动采集、自主融合、态势研判、智能预警与协同响应,实现煤矿瓦斯爆炸、煤与瓦斯突出、突水、内外因火灾、顶板、冲击地压等灾害在线监测和超前预警,以及与通风、抽采、排水等系统的联动控制[35-37]。
(1)瓦斯灾害多源信息融合预警技术。通过专业数据接口和配套网络化便携式检测设备,动态采集瓦斯灾害相关监测、检测信息。建立跨尺度、多层次、多参量预警指标体系和具有自学习、自调优、原因追溯能力的预警模型,自动辨识煤与瓦斯突出、瓦斯超限、瓦斯爆炸风险与预兆,融合地质构造、应力、声-电、通风隐患等多因素实时评估瓦斯灾害危险性,实现瓦斯灾害超前预警与联动控制。
(2)火灾综合预警技术。采用束管、光纤测温、红外传感、多功能气体监测等技术,对内、外因火灾等相关因素进行监测,融合发火机理与大数据分析算法对火灾进行自动诊断,并与注氮、注浆等防灭火设备进行联动控制,实现井下火灾的智能预测、预警与控制。
(3)矿井水害预警系统。基于钻探技术、高密度电法、地质雷达、核磁共振等技术对矿井水进行实时探测,建立水文实时监测数据库及水害防治模型库,基于水害多物理场预警融合预警模型实现水灾的超前预测、预警,并与矿井抽排系统实现智能联动控制。矿井水害预警的重点在于提出水害多物理场预警指标,指导矿井水的抽排治理工作。由于不同水体的预警理论发展程度不同,需要差异性的设计监测方案与预警指标。对于具有成熟水害预测预报理论的底板水、顶板水,在采掘扰动条件下,根据底板水压、富水性、构造密度、断层断距以及顶板冒裂区、富水区等参数与多物理场的耦合关系,通过微震、电法监测这些元素的变化特征,形成底板水、顶板水多物理场监测预警指标。
(4)顶板与冲击地压灾害预警技术。基于支架与围岩的“三耦合”理论,对液压支架的载荷与位姿关联关系进行解耦计算,建立基于载荷与位姿数据模型驱动的工作面顶板灾害预测、预警系统,实现工作面顶板灾害的智能预测、预警。基于电磁辐射法、电荷法,地震层析成像方法、地音监测法等,建立冲击地压精准的全维感知体系;基于冲击地压矿井全维信息反演理论和技术、冲击地压发生机理与孕育演化模型等,建立冲击地压主控因素、灾害风险与前兆信息的智能判识方法与预警指标体系,利用智能化冲击地压防治技术与装备,实现冲击地压的智能预测、预警与防治。
(5)井下粉尘智能防治技术。井下粉尘不仅容易引发尘肺病,而且还易诱发粉尘爆炸事故。基于粉尘产生、扩散机理,建立机载式、固定式、移动式等多种方式的尘源智能感知技术与装备,并与除尘装置实现智能联动控制。
(6)煤矿安全态势融合预警技术。采用统一规范的数据标准,实现瓦斯、水、火、顶板和冲击地压等多灾种数据的有效融合;采用可视化技术,实现灾害监测预警信息的图形化集成展现;自动构建不同灾害、不同参数、指标的数据典型特征图谱,实现异常数据的自动判识、自动锁定、回溯分析与趋势预测;构建基于数据驱动的煤矿安全态势预警模型,实现煤矿总体安全态势的大数据预测和分区、分级预警,为矿井安全管理提供决策依据。
7 煤矿智能化技术标准体系
7.1 煤矿智能化标准体系构建原则
煤矿智能化建设是一个多系统、多层次、多领域相互匹配融合的复杂系统工程,建立完整的煤矿智能化技术标准体系是建设智能化煤矿的基础与指南。研究煤矿智能化标准体系具有十分重要的现实意义和指导作用。
(1)给出煤矿智能化标准的总体布局和发展规划,明确标准工作的现状、现有需求和未来发展趋势,指明未来标准化工作重点和发展方向,为标准修订计划提供依据。
(2)理顺煤矿智能化现有的、正在制定的和计划制定的所有相关标准之间的相互支撑与相互配合的关系,减少彼此的交叉重叠,有利于明确标准化工作的重点。
(3)对关键技术、装备、行为及派生属性等进行统一规范,为煤矿智能化长远发展奠定坚实基础。
(4)便于全面系统的了解煤矿智能化所需的全部标准的情况,为从事相关工作的人员提供遵循的标准、掌握标准的现状和发展趋势提供详实的信息。
7.2 煤矿智能化标准体系框架
煤矿智能化标准体系的构建是与煤矿智能化技术体系一脉相承的,煤矿智能化标准体系框架,如图16所示。
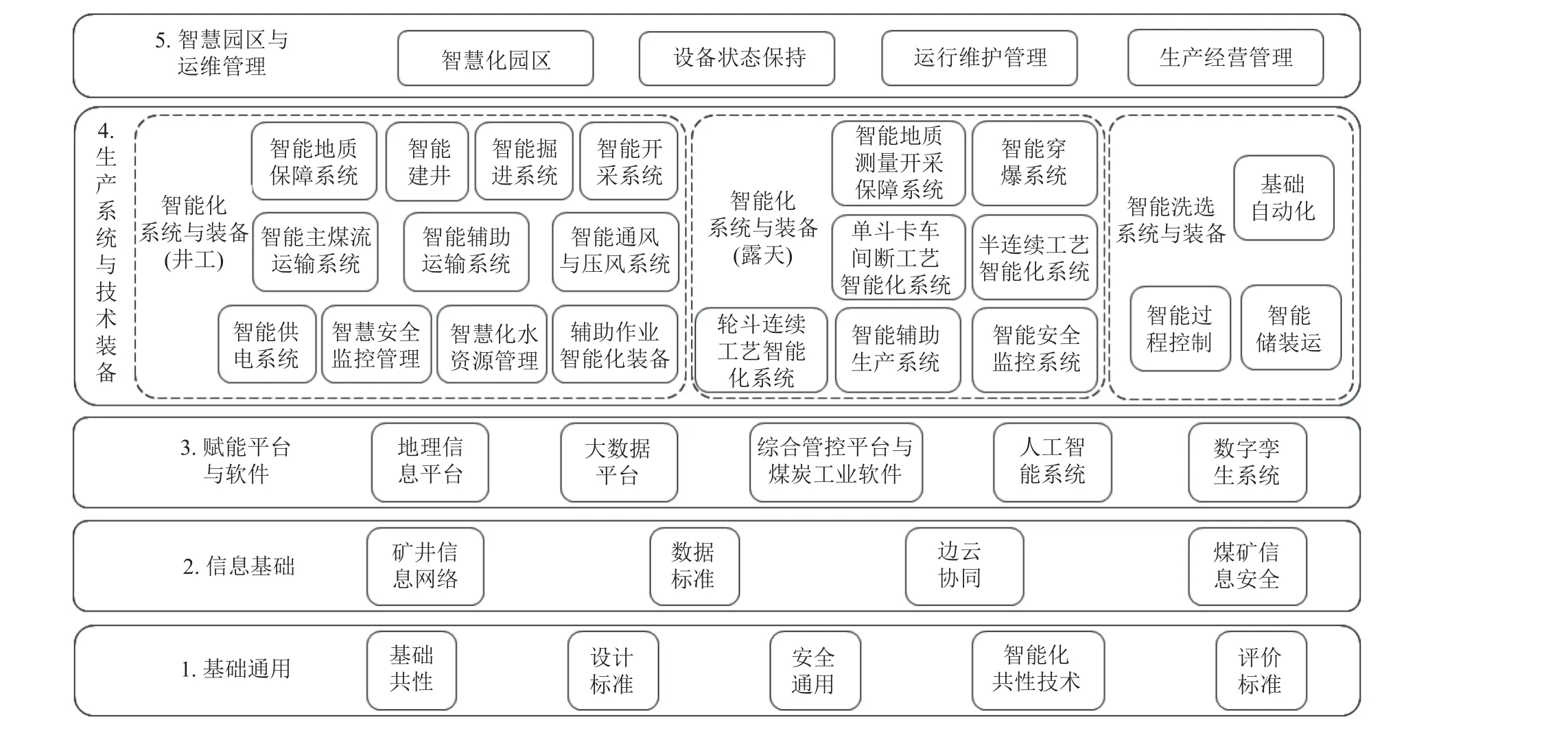
图16 煤矿智能化标准体系框架Fig.16 Coal mine intelligent standard system framework
其中,基础通用标准子体系是整个煤矿智能化标准体系的支撑基础,统一对煤矿智能化的认识,为其他各部分设计提供整体参考和指导;信息基础子体系规范网络系统和数据中心建设,打通数据传输和利用通道,统一数据采集、治理及应用标准,强化网络和数据安全,为矿井信息化提供基础支撑;赋能平台与软件子体系规范煤矿各类平台与软件的系统架构、开发环境、功能要求、评估指标、应用管理等方面标准,促进技术和管理体系革新;生产系统与技术装备子体系规范生产场景涉及的各子系统智能化关键技术、装备及传感器等技术要求,由于煤矿生产包括井工煤矿、露天煤矿、洗煤厂组成,其生产系统与生产工艺均不相同,因此标准体系针对其关键系统进行梳理时应分别规划;智慧园区与运维管理子体系规范智能化体系下的人员要求、管理模式要求,建设各智能化系统运维及工业厂区各类保障系统标准,提升智能化煤矿的管理、运行水平。
7.3 煤矿智能化重点标准化方向及领域
7.3.1 基础通用标准子体系
煤矿智能化基础通用标准子体系主要包括基础共性标准、设计标准、安全通用标准、智能化共性技术和评价与评估标准等方面的标准。其主要标准建设方向包括:
(1) 制定煤矿智能化术语和定义、体系架构、智能化煤矿工业互联网平台体系架构、边缘计算总体架构与要求、数字孪生参考架构等基础共性标准。
(2) 制定煤炭工业智能化矿井设计、绿色矿山建设、智能化生产系统设计、生产保障系统设计、煤矿地面及园区建设技术规范等设计标准。
(3) 制定煤矿井下电气设备管理规范、煤矿井下防爆电气设备安全要求、煤矿井下危险场所划分、煤矿井下电磁兼容安全要求、煤矿智能装备功能安全要求等安全通用标准。
(4) 制定煤矿智能传感通用技术、煤矿机器人共性技术、煤矿AI 等智能化共性技术标准。
(5) 制定智能化煤矿建设验收评价标准、煤矿智能化质量评价、煤矿智能化效益评价、智能化煤矿数据管理能力成熟度评估、智能化煤矿工业互联网应用成熟度评估等评价与评估标准。
7.3.2 信息基础设施标准子体系
信息基础设施标准子体系主要包括矿井信息网络、数据标准、边云协同、煤煤矿信息安全等方面的标准。其主要标准建设方向包括:
(1) 制定煤矿有线网络、无线网络、组网与网络设备、联网与接入设备、通信协议互联互通等网络标准。
(2) 制定数据编码与标识、数据采集、数据治理、数据服务与应用等方面的数据标准。
(3) 制定智能化煤矿数据中心、云计算、边缘计算、云边协同管理等方面的云边协同标准。
(4) 制定煤矿智能化系统建设条件下信息安全防护与信息安全管理方面的信息安全标准。
7.3.3 赋能平台与软件标准子体系
赋能平台与软件标准子体系包括地理信息平台,大数据平台,综合管控平台与煤炭工业软件,人工智能系统,数字孪生系统等方面标准。其主要标准建设方向包括:
(1) 制定煤矿地测数据管理,地理信息软件系统,矿井地质建模,矿井电子地图服务等方面的地理信息平台标准要求。
(2) 制定煤矿大数据平台通用技术,数据采集与存储,数据分析与数据建模,数据仓库,数据服务等方面的大数据平台标准。
(3) 制定煤矿智能化综合管控平台与煤炭工业软件的技术架构,开发环境,功能要求,评估指标,应用管理方面的综合管控平台与煤炭工业软件标准。
(4) 制定煤炭行业人工智能平台架构、集成要求、软硬件产品、评估指标、应用管理等人工智能标准。
(5) 制定煤炭行业数字孪生架构、建模要求、接口、应用等方面的要求。
7.3.4 生产系统与技术装备标准子体系
针对地下(井工)生产、露天生产和煤矿洗选三大生产场景中的各种智能化生产装备和系统,规范生产场景涉及的各子系统智能化关键技术及装备等技术要求。
地下(井工)智能化重点建设主动感知、智能决策、自动执行的高效生产系统,主要包括智能地质保障系统、智能建井、智能掘进系统、智能开采系统、智能主煤流运输系统、智能辅助运输系统、智能通风与压风系统、智能供电系统、智能安全监控系统、智能化水资源管理和辅助作业智能化装备等方面的标准。
智能化露天煤矿将信息化技术与露天煤矿开采工艺进行深度融合,包括智能地质测量开采保障系统、智能穿爆系统、单斗—卡车间断工艺智能化系统、半连续工艺智能化系统、轮斗连续工艺智能化系统、智能辅助生产系统、智能安全监控系统等方面的标准。
智能洗选系统与装备标准子体系针对洗选、煤泥制样和定量装车等方面主要工艺环节、重要装备、安全防控智能化为标准建设重点,形成洗选全过程智能感知、智能控制、智能管理与智能决策的技术与管理标准。
7.3.5 智慧园区与运维管理标准子体系
智慧园区与运维管理标准子体系主要包括智能化园区、设备状态保持、运行维护管理、生产经营管理等方面的标准。其主要标准建设方向包括:
(1) 制定煤矿智能化管理体系涉及的人员要求,岗位设置,管理模式及相配套的管理软件系统标准。
(2) 制定面向设备全生命周期管理涉及的煤矿设备可靠性要求、设备故障诊断方法与系统、设备维修维护管理等设备状态保持标准。
(3) 制定智能化矿井运维共性基础、信息网络平台运维、智能控制系统与装备运维、运行维护保障等运行维护管理标准。
(4) 制定指挥调度中心、智能仓储与物资调度、园区智能系统和生态治理等智能化园区标准。
8 智能化煤矿巨系统建设实践
8.1 张家峁煤矿智能化系统建设实践
智能化煤矿包含十大系统、上百个子系统,各子系统一般独立进行建设,硬件接口、通信协议、数据格式、业务逻辑等均不相同,整体运行稳定性和可靠性在地质条件渐变或随机突变的干扰下很难得到保证。针对上述难题,张家峁煤矿遵循打通信息壁垒、消除信息孤岛、避免重复建设的原则,提出了复杂巨系统智能化示范矿井建设总体方案,通过建设高速传输网络、矿山地理信息系统、研发安全生产管控一体化平台等,统一数据接口与编码标准,如图17 所示,实现矿井安全生产的统一管控。
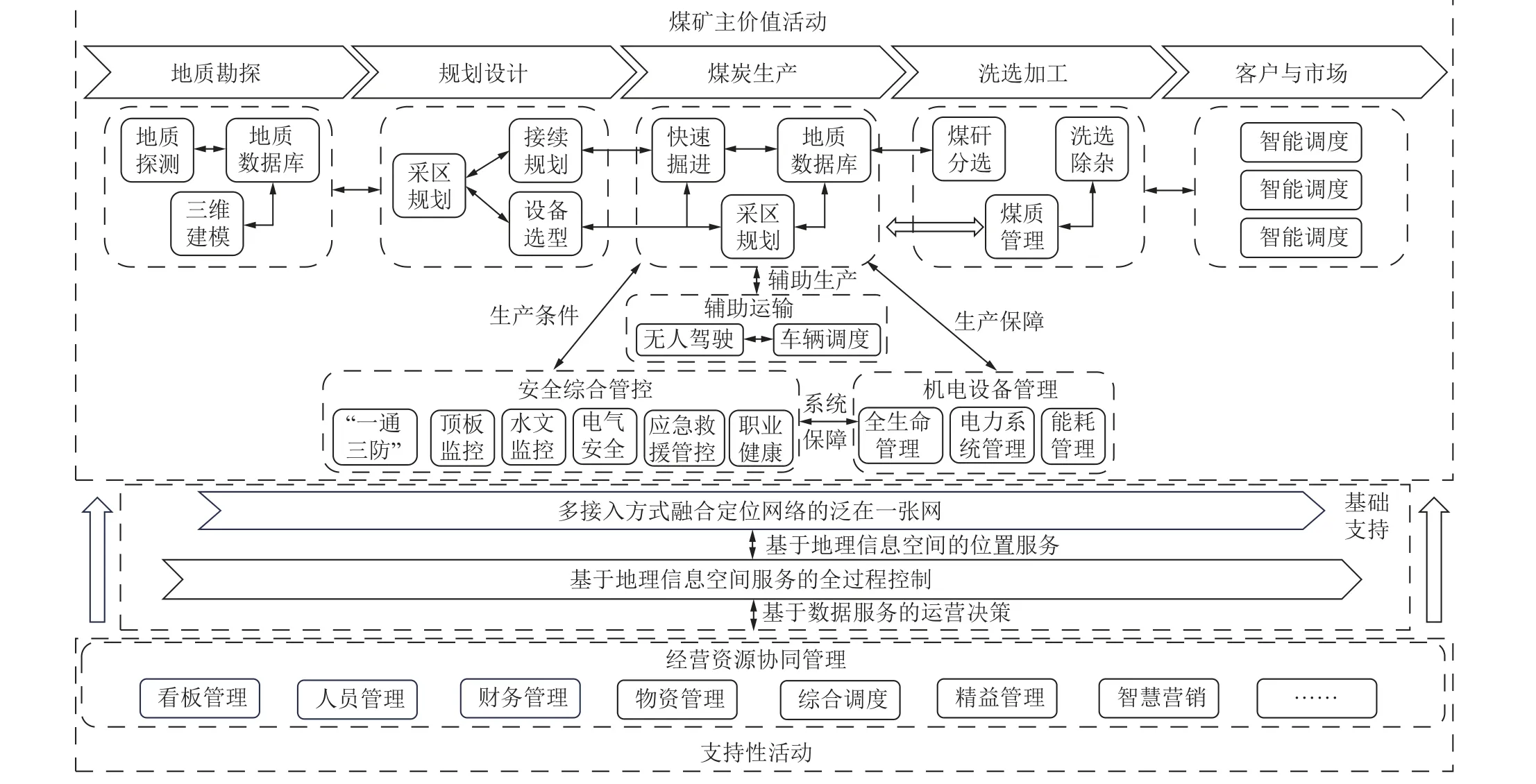
图17 智能化煤矿巨系统总体架构Fig.17 Overall structure of intelligent coal mine giant system
8.1.1 高速传输网络建设
张家峁煤矿根据业务承载要求,将整个企业管理网络建设成一张覆盖矿井工业场地、行政办公、安全生产的独立网络,链路设计采用万兆骨干、千兆汇聚、千兆到桌面,WiFi+5G 覆盖的方式。井上网络包括办公管理网络、生活福利区网络,井下环网由安全生产控制网络、视频监控网络和矿井无线专网三网独立成环。
研究设计了适用于煤矿特殊环境的井上下5G 组网方案,在井下复杂环境中测试,5G 现有基站的覆盖半径至少可以达到150 m,目标覆盖区域整体覆盖良好,下载最高速率933.4 Mbps,上传最高速率128.4 Mbps,可保障网络传输和语音的正常通讯。
8.1.2 煤矿安全生产管控一体化平台
基于煤矿安全生产智能化管控平台、煤矿大数据与数据管理平台以及煤矿智能化综合监控平台构建了煤矿安全生产管控一体化平台,为生产系统的集成管理和决策分析提供基础支撑。
(1) 煤矿安全生产智能化管控平台以煤炭工业大数据中心为数据底座,以智能矿山基础软件平台为基础平台,通过运行调度管控中心、安全环保管理中心、工程技术管理中心、支持保障管理中心与智能分析决策等5 个业务应用中心,支撑煤矿各业务系统高效运行,逐步实现煤矿企业数据资产沉淀,从而提升矿井智能科学决策水平及高质量发展。
(2) 煤矿大数据与数据管理平台实现数据资源的集中管理,满足煤矿数据消费需求,为综合管控平台提供数据支撑。数据管理平台需要提供包括煤矿数据管理、煤矿数据融合、煤矿数据服务、煤矿数据管控等四大类功能或服务,充分利用大数据基础平台完成煤矿的数据底座建设,确保对煤矿数据进行安全、可靠、有效的管理。
(3) 煤矿智能化综合监控平台通过集成矿井已建设的各类安全生产监测监控子系统数据,实现对煤矿作业现场安全生产状况的全方位感知,并根据安全生产管理及运行调度中心业务应用要求,实现对作业现场传感监测的协同控制,达到安全高效生产的目标。
8.1.3 智能化生产及辅助系统
将5G 技术应用于智能化采煤工作面,张家峁煤矿建成了1 个5G+厚煤层、2 个中厚煤层、1 个薄煤层智能化综采工作面,在现有设备运行数据自动化监测及远程集控的基础上,进一步优化数据挖掘与分析辅助决策,实现了智能化综采工作面内无人操作,设备开机率提升20%,整体生产效率提高30%。
针对掘锚一体机高精度导航、关键位置自主检测、远程多机协同控制等难题,研发了掘锚一体机+锚运破一体机智能化快速掘进系统,实现了掘锚机组自主导航与自动成形自动化控制,研发了掘进工作面数字化远程操控平台,实现了巷道掘进最高日进尺120 m,月进尺达到2 702 m。
研发建设了智能通风系统、全煤流智能运输系统、矿井水资源智能管理系统、多场景巡检机器人等,实现了井上下23 个机房碉室、66 个操作岗位的“有人巡检、无人值守”。
8.1.4 智慧园区建设
以先进的物联网、人工智能等技术为基础,将园区视频、照明、仓储、云数据中心、楼宇管理等内容进行集成管控,构建了一套业务全数字化、系统全连接、数据全融合的智慧园区综合管控系统。其中,智慧园区云数据中心采用分布式云计算数据中心技术架构支撑园区业务,通过虚拟化平台和自动化管理平台,采用融合架构构建资源池,实现了物理分散、逻辑统一的管理与运维,并向园区各部门、各人员提供统一服务;视频云平台、物联网平台、GIS 平台、集成通信平台、应用集成平台等形成视频资源池、园区地图+地图资源池、通信资源池、园区数据资源池等,实现了园区内信息统一采集、存储、计算、管理和应用,并通过统一的园区业务前台系统,在数据融合的基础上,实现了煤矿智慧、绿色、生态园区的协同运行。
经过智慧煤矿巨系统项目的建设,张家峁煤矿实现了系统级数据融合,数据利用率大幅度提高。建设的智能化综合管控平台具备了信息实时反馈、生产精准组织、装备自适应控制、安全智能分析、趋势动态预测功能。构建了防尘、防瓦斯、防灭火智能协同安全保障系统,全方位提升了矿井智能化安全管控水平。
8.2 柠条塔煤矿机器人集群建设实践
按照国家煤矿安全监察局《煤矿机器人重点研发目录》分类,当前的煤矿机器人分为掘进、采煤、运输、安控和救援五大类,服务于智能化煤矿的地质、掘进、采煤、主辅运、供电排水等数十个子系统[38]。传统煤矿机器人的控制模式多是每台机器人独立配套控制系统,由人工开启动作指令或定期完成工作,各机器人之间缺乏统一调度,没有和智能化煤矿主系统进行有效的交互,难以充分发挥机器人的作用;同时当前煤矿机器人以巡检类为主,受限于作业环境复杂及防爆等特殊要求,在各类辅助作业岗位还缺乏成熟的作业类机器人。针对煤矿机器人集群管控需求,构建了机器人集群管控与调度平台,研发了机器人集群协同控制关键技术。
(1)煤矿复杂应用场景下目标定位识别方法。研发了基于多视觉传感器的煤矿巷道场景多元信息拼接算法,利用外参计算实现RGB 图像、点云的多元信息拼接融合,从而自动分辨出目标物体的位置信息,如图18 所示;建立多维特征空间对目标进行全局特征描述,基于投影映射关系实现目标关键点的抓取,实现机器人精准作业。
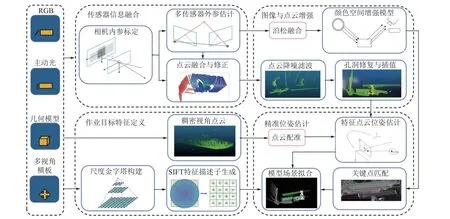
图18 基于视觉的目标识别方法Fig.18 Visual object recognition method
(2)煤矿机器人标准化接入技术。为保证机器人数据接入标准化及数据模型对象化,采用基于OPC UA 的统一机器人通信协议与中间件进行开发,煤矿机器人数据标准化处理流程如图19 所示。OPC UA使用面向服务的体系结构实现数据交换,基于TCP/IP 协议,采用3 次握手原则,通过通信堆栈发送消息,确保数据传输的可靠性。将OPC UA 应用于煤矿机器人信息交互,一方面针对已通过OPC 进行数据传输的采掘工作面机器人群、辅助作业机器人群等进行协议升级,构建其对象化的信息模型,形成包括机器人基本信息、姿态信息、控制信息一体快速扩展的对象;另一方面,通过构建协议中间件,实现协议自适应转换。
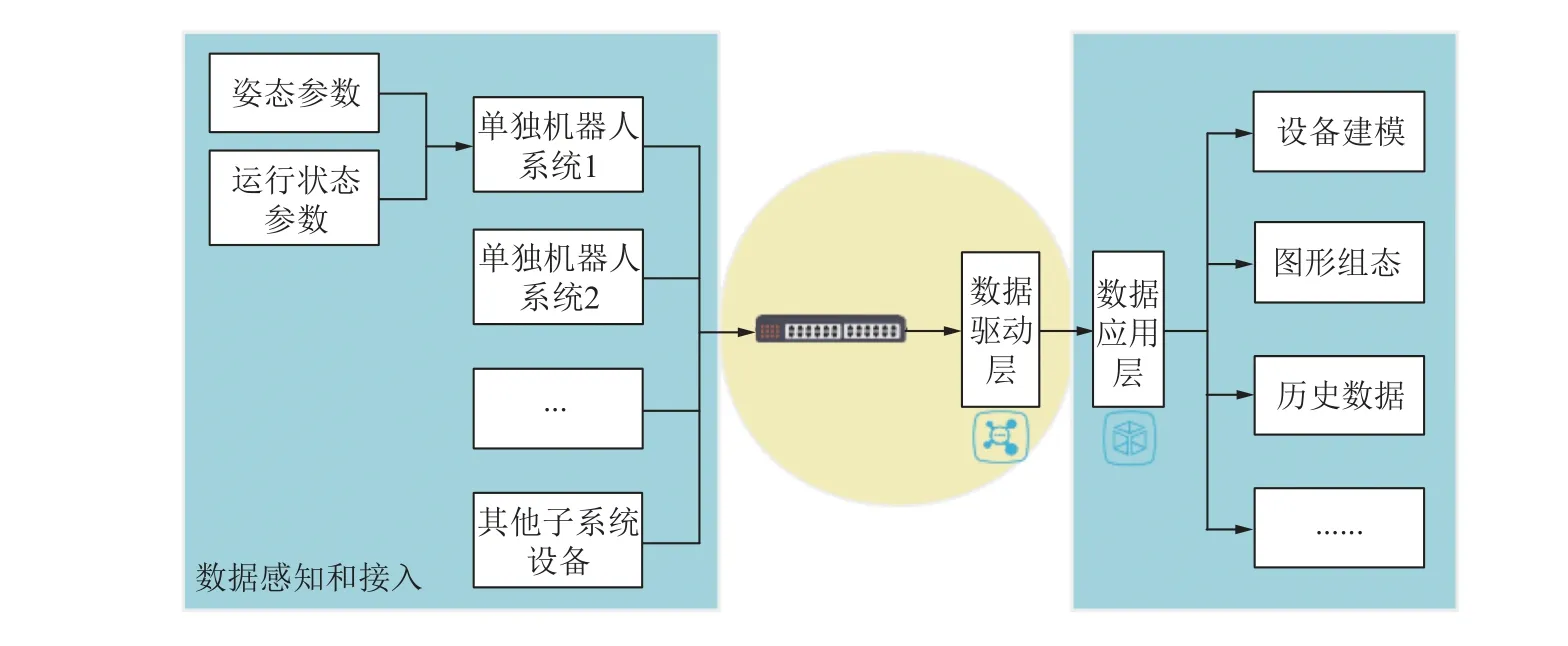
图19 煤矿机器人数据标准化处理流程Fig.19 Data standardization process of coal mine robot
(3)机器人作业调度策略。为解决区域范围内的突发问题,同时也能完成区域内正常的巡检作业任务,提出同类机器人覆盖作业调度策略。采用网格化管理,将同类机器人应用场景划分为若干区域,按区域分配机器人来保障每一场景下的正常巡检。网格化管理以调度时间为准,调度时间是衡量机器人响应快慢的主要指标,在有限的机器人资源配置下,进行合理部署才能保障区域内机器人响应时间最短。在日常调度指挥中,单体机器人自主调度和同类机器人覆盖作业调度虽然是2 种不同类型的资源部署方法,但两者在实际应用中往往相互结合使用。首先对关键紧急场景进行任务下达,在此基础上再进行区域移动巡检作业的部署。
(4)机器人集群管控与协同调度平台。机器人集群管控与协同调度平台在技术架构层面分为机器人群层、通信接入层、应用服务层、数据发布层与数据交互层,如图20 所示。
机器人群层:包括掘进类机器人、采煤类机器人、运输类机器人等各类机器人装置及传感监测信息,包括机器人本体数据、位置数据、动作姿态数据及视频信息等。
通信接入层:主要通过WiFi/4G/5G/工业以太网构建机器人数据传输的网络链路,实现对现场机器人的各类数据采集、对象化建模、数据处理及存储管理。
应用服务层:作为机器人集群管控平台的平台底座,对上层具体业务所需的海量数据进行分析和处理。
数据发布层:应用数据共享服务,实现对各类机器人对象化数据、专业算法模型输计算结果数据基于Restful、WebAPI、OPC 等方式的数据共享与发布;
数据交互层:结合前端机器人在数据孪生、仿真交互及协同控制等需求,应用HTML5、GIS 地图、U3D、图表、图形等多种模式的业务应用交互。
随着更多种类机器人在井下的应用,系统将根据所制定的任务策略和充电调度策略,实现机器人作业和充电的智能化,有效提升作业管理水平和机器人集群的协同作业效率;同时,利用底层设备提供的海量基础矿山数据,平台层运用人工智能技术构建数据模型,实现数据驱动下的机器人智能管控;此外,支持5G 网络数据接入业务,利用其高速率、低时延、高可靠特性,后期将实现机器人集群的远程控制和全过程仿真,进一步提升智慧矿山架构下的生产设备安全管控能力。
9 金属矿(井工)智能化建设实践
近年来,我国地下金属矿山开采正在向信息化、自动化、智能化方向快速发展,山东黄金、紫金矿业、新疆有色、江钨、江铜、洛钼、中国黄金等国内大型矿业集团都已启动智慧矿山建设,矿业领域向智能化、无人化方向的发展进程将不断加快,打造智慧金属矿山成为我国矿业发展的必经之路。
9.1 金属矿智能化开采技术架构与关键技术
金属矿(井工)智能开采技术是以智能开采共性关键技术为支撑、以智能化采矿装备与工作系统为载体,以智能化、无人化、高效化开采为目标的现代化矿山开采技术,整体发展趋势是开采工艺连续化、开采环境透明化、作业装备智能化、生产调度与控制协同化、安全作业无人化、集群控制规模化,金属矿山(井工)智能化开采技术总体架构如图21 所示。
基于金属矿(井工)智能化开采技术总体架构,进一步梳理明确了金属矿智能开采关键技术:
(1)金属矿(井工)泛在信息采集技术。建立了金属矿泛在信息采集传输控制协议,可全面兼容各类常见的通信协议及数据接口,打破了传统装备间因物理接口互异及协议不兼容导致的数据交互瓶颈,为金属矿山智能化开采提供可靠的数据支撑。
(2)金属矿(井工)井下无线通信技术。形成了分布式多层次复合网络架构,攻克了井下装备行驶中自主对等通信、基站快速切换及冗余传输技术难题,实现了井下无线网络无盲区覆盖、高速率传输和高可靠通信。
(3)井下高精度定位与智能导航技术。形成了基于激光扫描测量、航迹推测、UWB 定位、信标修正等多元信息融合的精确定位技术及基于路径规划与路径跟踪的导航技术,可有效支撑地下金属矿无轨装备的高精度定位和自主导航。
(4)地下装备智能控制技术。通过多种采矿装备的自动化与智能化改造,形成了一批具有自主知识产权的先进地下金属矿山装备智能控制技术,如车辆自主精确制动、远程装矿/自动卸矿、障碍物检测、铲运机精准自动卸载等。
(5)地下金属矿多装备协同控制技术。构建了凿岩台车、铲运机、破碎机、矿用卡车、有轨电机车等典型智能作业装备的运动学、动力学模型,实现了“一对多台”“一对多类”的装备集控操作,将离散装备聚合于一个平台进行控制,大幅提高了系统的集成度。
(6)井下无人采矿作业多区域安全控制技术。基于无人作业安全区域规划、精确定位、移动闭塞联锁及防碰撞控制等技术,建立了区域安全调度模型与信号调度系统,实现了地下智能装备在作业过程中的多区域安全指挥与监控。
(7)无人采矿生产运营一体化集控平台。基于短间隔控制理论,搭建了集设计、规划、运营和评价于一体的无人采矿生产运营集控平台,实现了生产计划、凿岩、爆破、铲装运输、溜井破碎、集中运输等生产工序的高效协同作业、集成管控与智能调度。
9.2 金属矿(井工)典型智能开采装备
近年来,我国地下金属矿智能开采装备技术水平得到了快速发展,已研发出一批具有国际领先水平的智能化采矿装备,基本实现了远程遥控作业及部分环节的自主作业。
(1)地下智能铲运机。以井下智能通信、井下精确定位与智能导航及智能调度控制等技术为支撑的地下智能铲运机已经具备了远程遥控铲装、自动称重计量、巷道环境及设备状态感知、巷道内智能行驶等功能。近年来,井下无人作业铲运机已在山东三山岛、安徽罗河等多个矿山部署应用。
(2)地下智能矿用汽车。已研发出35 t 交流电传动智能矿用汽车,具备视距遥控、远程遥控及自主行驶等模式,并在山东黄金进行了工业试验,实现了巷道空间检测、智能辅助驾驶、遥控和自主运行功能。
(3)地下智能装药车。已实现了智能寻孔、智能送管、电液比例负载敏感控制、自主行驶等功能,并在首钢集团、酒钢集团等推广应用。装药机构控制、装药过程控制、起爆弹自动装填等技术也得到了突破,为我国地下智能装药车完全智能自主化作业提供支撑。
(4)智能中深孔全液压凿岩台车。具备智能开孔、智能凿岩、智能防卡、包容寻优、频率匹配、岩石特性采集、自动接卸杆和异常工况处理等智能化功能,可实现在无人干预下自主完成整个凿岩作业的高智能化控制,显著提高凿岩效率。
当前,我国矿山企业正处于全面转型的关键时期。随着浅部及易采矿产资源的日益减少,我国金属矿山响应“向地球深部进军”的国家号召,开采深度不断增加,矿山现场工况条件进一步恶劣,对智能化装备与技术的需求也更加迫切。“十四五”期间,我国地下金属矿智能开采领域需要进一步攻克矿井开采连续化、无人装备作业集群化难题,将5G、工业互联网、大数据、人工智能等新的技术手段引入到传统的矿山企业中,形成以点带面、示范引领的良好局面,推动我国金属矿产开发利用领域的高质量发展。
10 结语与展望
智慧矿山建设是一项复杂的系统工程,随着新一代信息技术与矿山开发利用技术的融合和迭代发展,智慧矿山建设理念、技术架构、标准体系等也随之不断更新和完善。其发展趋势与展望如下:
(1)深入开展非接触式智能感知原理、海量多源异构数据融合分析、智能精准控制理论、智能精准探测与高精度地质建模、井上下设备智能精准定位与导航、复杂环境与开采系统耦合机理、重大危险源致灾机理与智能预测预警、矿山智能柔性生产供给理论、智慧管理模式等基础理论研究,构建智慧复杂巨系统的知识图谱,为矿山智能化提升奠定理论基础。
(2)深入开展井上下5G 应用场景的探索与实践,推进5G 在井下装备远程操控、集群化作业和高危区域无人化作业等场景的应用,进一步提升5G 在露天矿山采掘运输等关键环节的应用水平,实现5G、人工智能、大数据等数字技术和传统矿山技术的融合发展。
(3)推进矿山企业数字化转型升级,全面提升矿山各业务系统的数字化水平;开展矿山数据治理及应用的探索实践,制定矿山统一的数据规范与通讯协议标准,开发矿山行业数据模型,实现系统自主决策与控制,支撑矿山智能化升级;开展矿山灾害大数据融合分析与智能监测预警平台建设,构建矿山灾害智能预警模型,实现矿山安全状态综合评判和分区、分级预警。研发自主可控的终端/装备操作系统,加强数据应用平台安全管理,规范数据交换共享安全、应用安全、出境安全,营造矿业数据新生态。
(4)加快突破智慧矿山关键技术与装备,研发应用一批具备复杂环境感知、智能人机交互、灵活精准控制、群体实时协同等特征的智能化装备,重点研发高精度、多功能、高可靠智能传感器,研发高精度地质探测技术与装备,开发煤矿GIS+BIM 技术,研发高效永磁变频技术装备,研发智能高效破岩(煤)技术、自适应支护技术、智能运输技术等,优化基于透明地质的智能化无人开采技术;研发井下低功耗、高精度、多功能环境监测传感器,深化水、火、瓦斯、粉尘、顶板等灾害发生机理与防治技术研究,开发井下避灾路线智能规划系统。研发推广露天矿山电铲-卡车-辅助设备无人驾驶技术装备,开发露天矿山智能化半连续/连续开采技术装备,提高露天矿山智能化水平。研究矿山智能柔性生产技术体系,开发矿产资源智能柔性开发供给运行模式与平台,保障矿产资源安全稳定供给。
(5)聚焦矿山装备产业创新发展,加快推进传感器、控制器、高端芯片、关键材料、高性能检测设备、工业基础软件等的研发应用,提升矿山重型装备的可靠性与保障能力;加快推动智慧装备研发应用,全面提升矿山生产经营管理全流程的智能化水平;积极推进矿山装备成套化、智能化、高端化、绿色化转型升级,构建矿山智能装备制造全产业链条、全生命周期服务的高端制造产业集群。
(6)针对机器人技术在煤矿应用过程中的基础理论、关键技术装备和系统平台难题,重点开展煤矿井下机器人精准定位、自主感知与决策、精准导航与调度、机器人避障、机器人集群管控与动力续航管理、轻型防爆材料等基础共性关键技术,鼓励开展煤矿机器人防爆安全设计理论及方法、长续航高能量密度机器人动力技术、井下受限封闭环境下机器人自主精准定位导航技术、机器人高可靠抗干扰通信技术、煤矿复杂环境下智能感知与险情识别技术、煤矿井下机器人集群协同控制技术等研究,推进煤矿机器人集群应用。在研发推广工作面巡检机器人的基础上,重点研发井下复杂环境高效作业类机器人,加快井下机器人集群与应用平台的研发应用,推进危险岗位机器人作业,减轻工人劳动强度,提高工作效率和质量,最大程度减少煤矿安全隐患。
(7)推进相关院校矿业工程类专业的优化调整,探索创新型、综合化智能采矿人才培养新模式,加快“智能采矿工程”新专业师资与教材建设,融入智能采矿方向新技术、满足智能采矿新需要、汇聚智能采矿发展优质资源,加快培养具备新一代信息与采矿技术等多学科交叉知识和创新能力的高素质复合型人才。
(8)推进智慧矿山建设由目前单个系统智能化向智能整体化、系统化迈进,推进矿山从系统智能化向矿山全域、全生命周期、全产业链智能系统化迈进,逐步建成生产环境全时时空感知、生产过程自主可控、生产安全闭环管控、生产要素智能柔性配置的现代矿山数字化智能化高质量运行体系。按照生产规模、地质条件、灾害情况、煤层赋存条件等指标,建立“实施应用—及时反馈—持续迭代”的矿山智能化动态发展机制,实现人的智慧与矿山智能系统的有效融合。
