基于机器视觉的复杂机械零部件尺寸测量技术
2024-04-24安晓英
安晓英

摘要:对图像进行信息采集,运用灰度化处理图像信息将图像的色彩和亮度转换成灰度图像所属值,减少外界干扰。运用高值滤波器衰减图像中的亮度变化较小的低频区域来提升图像轮廓,保留出图像的边缘细节。运用双线性插值方法,计算得到最相近目标像素值,并进行详细区分。通过对复杂机械零件几何图形参数检测,计算对应的几何参数,获得零件不同外形的尺寸并标定,得到真实尺寸完成测量。测试结果表明,机油泵内外转子轮廓尺寸测量精度均保持良好,可实现高精度测量,具有较好的应用效果。
关键词:机器视觉;机械零部件;尺寸;测量技术
0 引言
将测量技术科学运用在工业生产中,有利于稳步提升生产效果,提高测量精度。近年来,基于机器视觉的复杂机械零部件尺寸测量技术,在工业生产测量与检测中得到广泛应用[1]。
分析零部件图像时,通过应用图像识别技术得到不同噪声结果,并根据噪声的类型进行有针对性的去噪,快速实现滤波,有助于得到精度较高的图像。将复杂机械零部件图像为测试载体,运用测量技术得到目标的处理信号,可获得零部件的尺寸信息。在硬件设备中提取更为准确的机械零件图像边缘信息,有助于提升工业机械零件的尺寸检测精度。
现阶段的测量技术对于图像边缘的细化程度不高,传统测量方法对于零部件的几何测量精度影响较大,难以满足工业要求目标,同时还存在人为干扰因素,使得测量结果难以达到预期。鉴于此,本文以复杂机械零部件尺寸测量技术为研究目标,运用机器视觉技术,结合实际情况进行实验与分析。
1 零部件尺寸測量
1.1 复杂机械零件图像预处理
1.1.1 图像信息采集
首先对图像进行信息采集,然后运用图像采集卡技术对图像信号进行传输[2]。通过摄像机拍摄零部件的具体图像,运用I/O接口将图像信息传输到采集卡中,将数字信息进行A/D转换,进行数据解码。通过灰度值进行像素取值,并将拍摄的光强度值形成对应矩阵,存储在计算机中。
1.1.2 将图像色彩和亮度转换成灰度图像所属值
可运用RGB值将图像进行灰度化处理,减少外界干扰。运用高值滤波器衰减图像中的亮度变化较小的低频区域,对图像边界亮度低、振幅较小的区域进行调节,以此来提升图像轮廓。
设定灰度图像为g(x,y),运用图像二道化技术,确定操作对象的阈值为?(x,y)。定义最小平方值为起点,对其进行灰度直方图推算,确定其灰度值阈值后,将图像进行划分。
设定图像的整体像素为F,灰度级有e级,获取灰度值为u的图像元素个数为yu,得到不同灰度级中的概率。将其应用在图像划分中,得到两组图像[3]。设定目标图像为A,背景为B。则目标和背景中的灰度级概率计算公式为:
(1)
式中:A=(0,1,...,t),B=(t+1,...,n-1)。
计算目标的平均灰度值和背景的值,得到整个图像的平均灰度值,然后计算出对应的方差值。将上述计算结果进行整合,得到最大方差值即为划分目标和背景的阈值。
1.1.3 图像预处理方法
在一幅图像中,不同灰度级别像素的分布反映聚类的组成情况,当图像的信噪比较小时,在图像划分时容易产生较大误差[4]。将像素点的灰度值,结合相邻点的分布情况绘制成直方图,通过直方图可得到聚类的个数。这样就能够得到像素灰度值的分布信息、附近邻域的值。
对图像的二维灰度直方图进行降维投影,可得到较为精确的聚类中心点坐标。通过应用滤波技术将图像中的脉冲噪声进行消除,保留出图像的边缘细节,即完成对于图像的预处理。
1.2 几何尺寸测量与机器视觉技术标定
1.2.1 获得图像定位点信息
在空间坐标中,可对图像亮度进行数字化处理。设定实数矩阵K,将图像进行预处理后代入矩阵K中,对其进行运算,便可准确获得图像定位点信息[5]。
1.2.2 亚像素边缘标记
运用微分算法进行边缘检测时,存在噪声缺陷。运用曲面结合方式,用曲面的梯度代替点位,去除噪声即可进行精准的边缘检测。
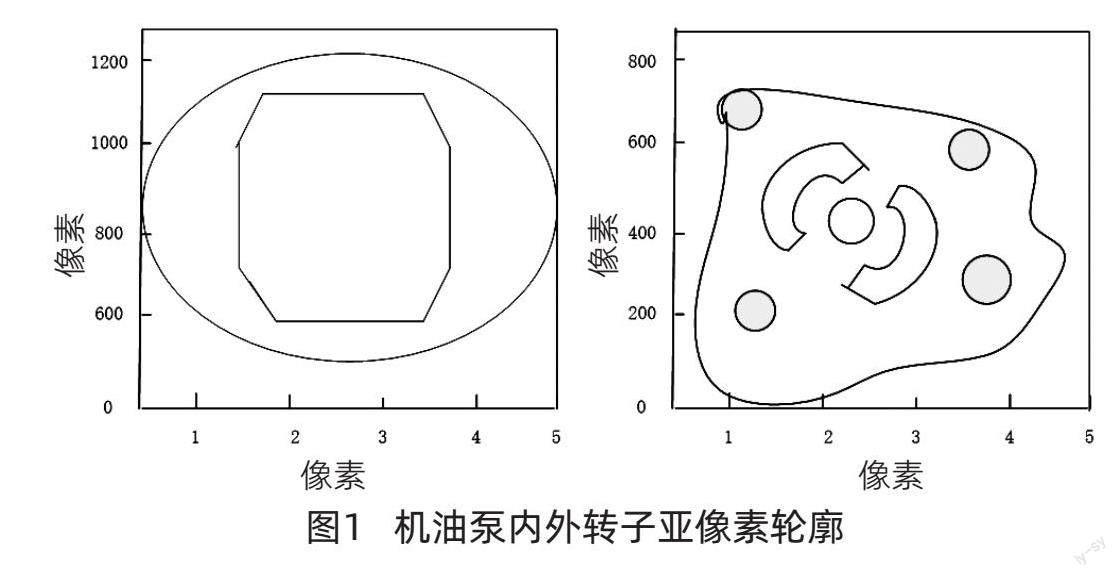
通过中心计算公式,将光学成像后的空间中物体灰度值,通过聚变得到边缘数据。该数据符合高斯分布规律,计算窗口中的不同边缘梯度,可得到二次曲线的最大最小值,将其标记为亚像素边缘。机油泵内外转子亚像素轮廓如图1所示。
1.2.3 获取边缘和最近像素
运用双线性插值方法,计算得到最邻近目标像素的数据,并对像素进行详细区分。运用边缘检测方式得到边缘和最近像素,并对其进行处理[6]。
通过分析摄像机的物理模型,可得到图像中每一个点的图像位置与空间物体表面某点的三维关系,设r-X、Y、Z为摄像机坐标系,原点为ro。零部件E在三维坐标系中,其三维坐标表示为的三维坐标为(Xq、Yq、Zq),图像坐标系中任意成像点w的图像坐标为(Xw、Yw、Zw),单位为像素数。设定焦距为p,工业摄像机CCD摄像机的焦距为1,将w为理想图像坐标,则根据坐标之间存在的关系可以得到内部成像参数矩阵。
按照摄像机的摆放位置不同,统一设定标定坐标系,并根据转化关系,得到摄像机在坐标系中的平移和旋转变换位置。在视觉技术检测过程中,将传输到计算机中的图像进行数字处理,根据像素的大小得到图像边缘位置信息。
为得到零部件的实际尺寸大小,需要计算两者之间的对应关系。将物体尺寸设定为S,将其放置在被测目标位置中。将图像进行预处理后,为消除镜头畸变引起的误差,在不同位置进行多次测量,并计算其平均值为测量值。
1.2.4 零部件的真实尺寸计算
获得零件的边缘线后,零部件的真实尺寸可以通过直线端点值,计算出直线段所占有的像素个数。设定在图像空间直线段的两个端点分别为和,由两点距离公式该线段所占有的像素个数,计算公式为:
(2)
式中:N为线段所占有的像素个数。根据像素个数,得到不同像素的真实尺寸,计算得到被测物体的实际尺寸I的公式为:
I=kN (3)
式中:k为标定系数;N为CCD线段像素个数。对于圆尺寸测量时,运用Hough算法,将圆心坐标设定为(cx,cy),半径为r,得到真实圆的尺寸半径公式为:
R=kr (4)
对复杂机械零件几何图形参数进行检测,运用变换算法对直线和圆进行检测,计算对应的几何参数,获得零件不同外形的尺寸。通过标定方法获得复杂零部件尺寸的真实值,即完成测量。
2 实例分析
为了测试本文方法的实用性和准确性,在上述实验环境中,设置10个实验小组进行验证实验。通过提取机油泵的外转子轮廓,测量距离中心所得数据,运用最小二乘法拟合得到中心距测量数值。
将公称尺寸设定为19.25mm。提取机油泵内转子数字图像轮廓,设定基准孔的圆度公差值,运用最小二乘法对圆进行拟合。
2.1 实验准备
在测试前,选择夏松pc84-5型机油泵油散热器芯子(6K125F)进行实验。运用LED作为照明光源,并使用ARC Camera系列可变焦距、一体化光学摄像机CCD进行拍摄。
通过收取光电传感器的信号触发,进行机械零部件图像采集,以提取零件的信息特征。对图像进行预处理,以提升图像采集时的质量。传递图像数字信息,并采取量化和还原的方式将得到后的图像进行存储。
工业CCD相机型号为MB-DLW35K,数量为2套。采集卡一块,双目支架一套,标定板一套。图像分析与处理的软件为MATLAB。相机的安装以镜头中心线为基线,当光轴为基线的夹角为45°时可获得较好拍摄效果。
2.2 测试与分析
利用多项式计算零件边缘数据,获取某机油泵零部件的图像信息,得到图像亚像素边缘轮廓。运用Ramer算法将其分段,测量机油泵内外转子的精度。提取机油泵外转子数字图像轮廓,得到不同圆弧段图像。
2.2.1 測试结果对比
运用本文方法的小组为小组1,其他小组运用传统方法。将测量的机油泵外转子内轮廓的测量数据进行记录,并计算相对比公称尺寸的误差值,结果如表1所示。将测量的机械泵内转子数据结果记录,并计算其尺寸偏差值,得到的结果如表2所示。
由测试结果可知,小组1的机油泵外转子内轮廓尺寸测量精度保持良好,实验结果与公称结果相同,而其他小组的实验结果均存在尺寸偏差。由此说明,应用本文方法能够表现出良好的测量结果。同时,机油泵内转子的测量结果也较为准确。运用本文方法进行测量的精度满足预期目标要求。
2.2.2 可行性验证
为了进一步验证本文方法的可行性,将复杂机械零部件尺寸测量结果精密度作为实验指标。
复杂机械零部件尺寸测量结果的精密度指的是测量结果的准确程度。通常使用标准偏差或方差等统计学方法,来表征测量结果的精密度。测量结果的精密度越高,说明测量方法越可靠,测量误差越小。
本文主要通过标准偏差来反应测量结果精密度,计算公式如下:
(4)
式中:Xi数据与平均值的差的平方和;n表示数据个数;μ表示数据的平均值。
通过公式(4)计算得到的结果如表3所示。由表3中的数据可知,本文方法在多次测试中,标准偏差均低于传统方法,其最低值仅为1.09,由此可知本文方法的测试结果更加准确、可靠。
综上所述,通过基于机器视觉的检测,能够精准获得复杂机械零部件的图像。通过提取亚像素边缘来进行尺寸测量,可提供准确的检测数据,有利于增强工作效率,减少因误差大而造成的问题。将本文方法应用在复杂机械零件中可实现高精度测量,具有较好的应用效果。
3 结束语
本文从机器视觉入手,深入研究了复杂机械零部件测量问题,探究了基于机器视觉的复杂机械零部件尺寸测量技术。测试结果表明,采用文中的测量技术,机油泵内外转子轮廓尺寸测量精度均保持良好,可实现高精度测量,具有较好的应用效果。但方法中还存在一些不足之处,例如对测试样本的选材单一,计算方法尚未全面优化,引入的变形指标数据存在更新不及时等。今后应完善计算,总结采集图像中因遇到噪声等原因对于精度变化的影响,对于其他原因影响也要及时做出研究和记录。
参考文献
[1] 杜丽峰,周正,王天琪.基于机器视觉的铝合金轮毂尺寸测
量[J].机械设计,2022,39(S2):193-198.
[2] 胡民泉,李登华,乔金明,等辉.基于机器视觉的量水堰堰
上水头自动量测技术[J].水电能源科学,2022,40(5):194-
197+177.
[3] 贾国邦,宋丽丽,曹博文,等.基于机器视觉的微小孔零件
尺寸检测研究[J].工具技术,2021,55(7):105-109.
[4] 李执,闫坤,傅琪,等.基于机器视觉的金属工件尺寸测量
[J].仪表技术与传感器,2022(3):92-97.
[5] 陈怡然,廖宁,刘超.基于机器视觉的圆形零件尺寸参数测
量[J].工具技术,2022,56(3):109-113.
[6] 李阳,陈家新,郑旭栋,等.基于机器视觉的纺纱锭子三维
振动检测技术[J].东华大学学报(自然科学版),2022,48(5):
101-107.
