工业机器人控制中的迭代滑膜控制应用研究
2024-04-24韩洋祺胡竞张亮
客联 2024年1期
关键词:工业机器人
韩洋祺 胡竞 张亮
摘要:工业机器人的应用需求不仅要求高度的灵活性、稳定性、快速性和准确性,还要求可以人机交互和外部外境感知等。
关键词:工业机器人;迭代滑膜;控制應用
随着科技的不断进步,人类社会的需求不断提高,工业机器人的应用需求不仅要求高度的灵活性、稳定性、快速性和准确性,还要求可以人机交互和外部外境感知等。同时多变和复杂的工作环境要求工业机器人的控制技术不断改进,传统的控制策略已经很难达到高精度、高性能的条件,因此需要更为先进的控制技术来提高系统的控制效果。
以多关节工业机器人为研究对象,在单关节位置跟踪控制策略研究部分,设计了一种基于RBF神经网络的迭代滑模控制策略,提高了系统的控制精度、关节运行速度,以及降低了系统抖振。
为验证基于RBF神经网络的迭代滑模控制策略的有效性,实验仿真对象为二关节工业机器人,并采用MATLAB进行仿真分析。
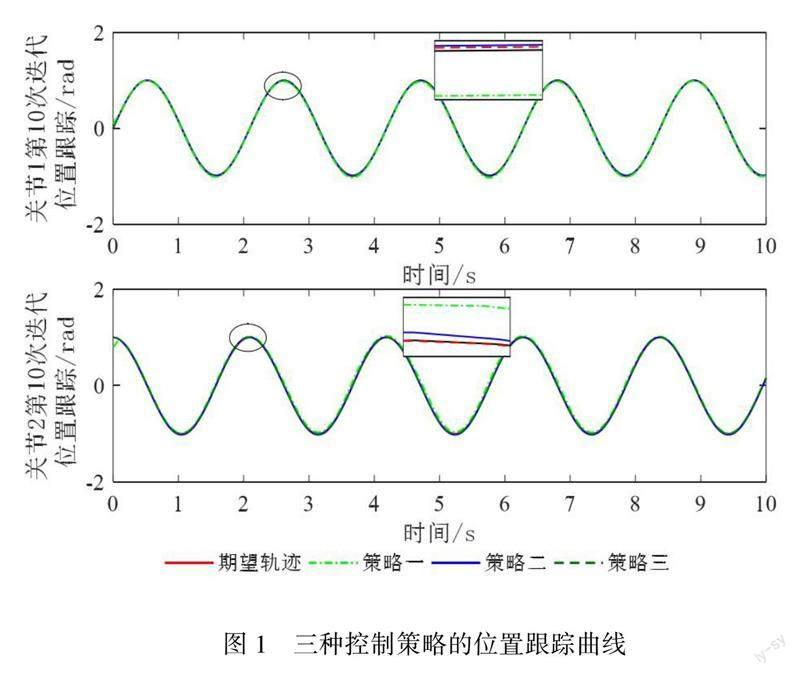
图1为滑膜控制(策略一)、迭代滑模控制(策略二)和RBF神经网络迭代滑模控制(策略三)第10次迭代的位置跟踪曲线。可以看出基于RBF神经网络的迭代滑模控制策略具有更好的轨迹跟踪性能。
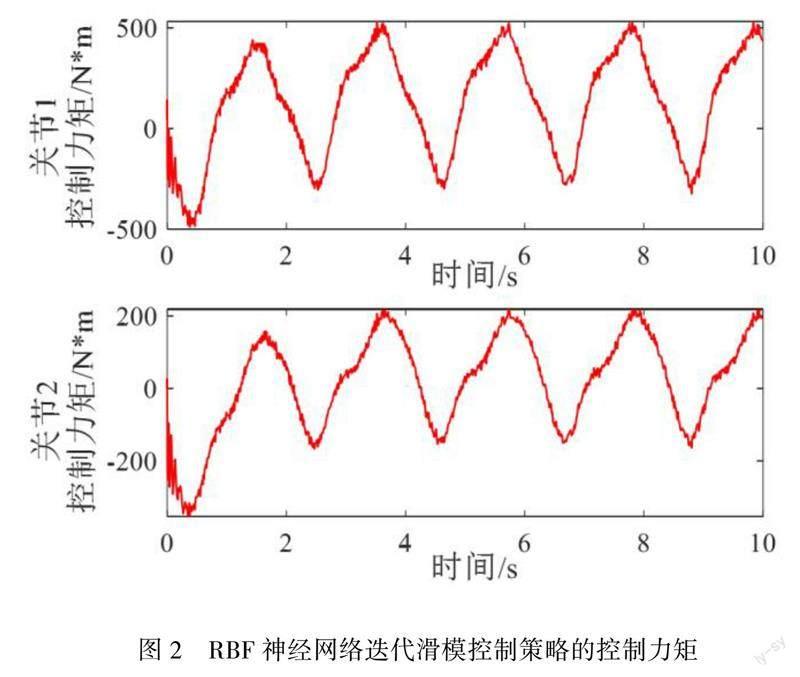
由图2得到RBF神经网络迭代滑模控制策略的控制力矩抖振比较强烈,初始控制力矩较小。
说明RBF神经网络迭代滑模控制策略虽然使得工业机器人的关节控制力矩的抖振现象增大,但是降低了关节位置误差和速度误差,提高了工业机器人的控制精度和关节运行速度。
课题项目:本文来源于重庆建筑科技职业学院2023年校级科研项目:工业机器人控制中的迭代滑膜控制应用研究(编号2023021)。
