基于深度学习的高压电缆隧道巡检机器人研究与设计
2024-04-24颜学文杨友晨范新月胡伟
颜学文 杨友晨 范新月 胡伟


摘 要:随着电力系统的发展,高压电缆的安全稳定对供电系统至关重要。传统人工巡检效率低、劳动强度大且有安全隐患。开发自动化、智能化的巡检机器人显得必要。研究国内外现状和方法后,目标是设计能自主导航、识别故障并进行实时监测的基于深度学习技术的高压电缆隧道巡检机器人系统。
关键词:高压电缆;隧道巡检;故障诊断;深度学习
中图分类号:TP242.6 文献标识码:A
随社会经济发展,电力需求增长,城市地下电缆隧道成主要供电设施。面临复杂环境和安全隐患,提升巡检效率与安全是关键。本文提出一种基于深度学习的高压电缆隧道巡检机器人方案,涵盖设计、系统、结构和视觉识别,经试验验证其有效性及性能优化,并对未来研究提出展望。
一、研究背景
城市地下电缆隧道增多,国内高压电缆隧道巡检机器人取得进展并应用,但与国外先进水平仍有差距。面临结构设计、导航定位、通信、故障检测等技术挑战。未来研究将强调智能化、自动化、网络化和可靠性,跨学科合作促进创新。
国外较早研发相关技术,研究深入,机器人具备自主导航、缺陷检测等功能,技术成熟且产业化程度高,广泛应用且提供租赁与定制服务。国外研究将继续向智能化、自主化、网络化和可靠性发展,注重轻量化、低成本和环保。
二、高压电缆隧道巡检机器人系统设计
(一)服务器控制系统
服务器控制系统由一个主机和一个小型基站构成。主机处理交互信息和識别操作员协议,向机器人检测系统和门禁系统发送指令。它包含紧急情况模块和检测算法模块。小型基站则管理地图数据、执行协议指令和进行图像识别。数据通过基站网络传输,以便系统有效应对突发事件。
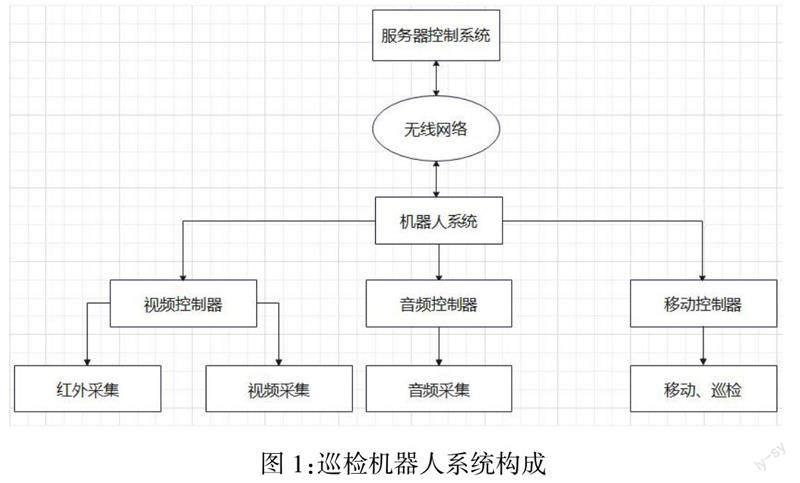
(二)巡检机器人系统构成
巡检机器人系统配备视频采集、红外采集和人体控制装置,并通过WiFi与服务器建立网络连接。利用该连接,机器人可将拍摄的图像、视频以及实时定位信息回传至服务器。中央处理器指导机器人的路径算法,确保按预定路线进行检测。巡检机器人系统构成如图1所示。
(三)智能巡检系统软件部分设计
基于深度学习的巡检系统核心在于应用深度神经网络进行图像识别和模式分析。虽然相对于最前沿的目标检测模型,传统深度学习模型可能在准确性和效率方面存在局限,但它们仍然为众多算法提供了关键技术基础。图2为深度学习巡检原理。
巡检原理主要由以下4个步骤组成:
(1)原图输入:将原始图像输入到深度学习模型中。
(2)生成目标候选区域:通过选择性搜索从原始图像中生成一个候选区域。根据巡检特征分量权重,对识别出的候选区域图像进行灰度化处理,并确定关键设备图像特征:
R = G = B = ωr
R + ωgG + ωbB
ωr + ωg + ωb (1)
在式(1)中,ωr、ωg、ωb分别表示图像颜色红、绿、蓝的权值。该方法首先将图像分割成若干小区域,然后对这些小区域进行搜索,并根据以下四条规则对最大概率区域进行合并。规则1:基于颜色直方图分布,将颜色相似的小区域合并。规则2:通过梯度直方图的分布,合并纹理相似的小区域。规则3:当一个小区域被合并时,合并区域的总面积相对较小,从而避免了大区域合并多个小区域。规则4:合并任何一个小区域后,合并区域的总面积不会超过目标对应的边界面积,这就保证了合并区域的形状更加规则。反复进行合并操作,直到没有区域可合并,最后输出所有区域,也就是目标候选区域。
(3)抽取特征:利用卷积神经网络从候选区域中抽取特征,指定区域建议框的尺寸,然后抽取卷积特征。
(4)类别和回归:每个类别的目标都会被相应的支持向量机(SVM)分类器进行分类,该算法只需确定自己是否属于目标类别,然后用返回值对目标候选帧进行校正。
(四)巡检机器人视觉系统
当前巡检机器人的视觉系统对障碍物的识别精度和测距精度都比较低,针对这一问题,我们采用深度学习中的 SSD 算法识别障碍物,基于单目测距模型构建地平面约束测距定位模型以实现精准测距,搭建新的巡检机器人视觉系统。相比 YOLO 算法和 R - CNN 算法,SSD 算法综合性能更加优秀; 迭代次数达到 500 次时,SSD模型需要 7.8h 进行训练,比 YOLO 模型快 2.5h;比 R - CNN 模型快 3.7h; 迭代次数为 600 时,SSD模型的准确率为 95.8% ,比 YOLO 模型高 22.4% ; 比 R - CNN 模型高 9.7% ; 地平面约束测距定位模型平均误差为 0.89cm,比空间平面测距模型小1.89cm; 比单目视觉测距模型小 1.03cm。以上结果说明,基于 SSD 算法和地平面约束测距定位模型的新巡检机器人视觉系统能够有效地对障碍物进行识别检测和测距定位,从而实现智能化、自动化自主定位导航。
三、发展高压电缆隧道巡检机器人的意义
高压电缆隧道巡检机器人能自动高效完成巡检,保障人员安全,并减少依赖专业人员的人力成本。这些机器人利用高精度传感器和先进算法提高诊断准确性,提升巡检质量。它们还助力实现电力系统的智能化管理,增强可靠性和稳定性。同时,巡检机器人推动机械设计、电源补给、检测和通讯等技术的创新,并减少环境影响。此外,其研究对社会经济发展有重要意义,确保电力供应和社会可持续发展。
四、实验结果与分析
(一)实验结果
通过相关场地模拟环境和实际电缆隧道中的一系列试验验证电缆隧道机器人巡检过程中系统功能及安全可靠性。
(二)高压电缆隧道巡检机器人的优势与未来发展
新型高压电缆隧道巡检机器人在时效性和准确度上均优于传统人工巡检。机器人通过预设轨道多次巡检,实时数据传输,缩短维修时间和成本;而人工受时间、天气和熟练度限制,导致结果不准确。技术分析表明,机器人整合了机电一体化、导航规划、多传感器融合等技术,优化系统和提高定位精准度等可保障电缆网络稳定运行。结论指出,虽有进展,但巡检机器人在复杂情况适用性、平台承载能力和能源供应等方面仍有待研究和改进,未来需在技术创新和功能扩展等方面继续努力,以满足电力行业高效安全巡检的需求。
参考文献:
[1]范厚良.基于深度学习的发电厂设备智能巡检系统设计[J].电子设计工程,2022,30(01):108-111+116.DOI:10.14022/j.issn1674-6236.2022.01.023.
[2]宋雷震,孙晓东.管道巡检机器人目标识别与定位检测技术[J].吉首大学学报(自然科学版),2021,42(05):38-43.DOI:10.13438/j.cnki.jdzk.2021.05.007.
[3]宫法明,马玉辉.基于时空双分支网络的人体动作识别研究[J].计算机技术与发展,2020,30(09):23-28.
[4]崔旺.隧道巡检机器人的结构设计与运动控制[D].沈阳航空航天大学,2017.
[5][1]薛倩.基于人工智能的配电室设备自动巡检系统的研究[J].自动化应用,2023,64(17):12-14+17.
