基于有功功率修正的MMC 串联结构微电网相间功率平衡控制策略∗
2024-04-17宋凯平王兴贵
宋凯平 王兴贵 薛 晟
(兰州理工大学电气工程与信息工程学院 兰州 730050)
1 引言
近年来,能源需求增长带来的环境污染、能源短缺等问题尤为严重,为使微源最大化接入,迫使微电网从单一结构模式向模块化转变[1~3]。但不同结构类型的微电网均存在一些需解决的问题。为此,学者提出了基于H桥微源逆变器串联连接微电网(Series Micro Power Grids,SMPGs)[4]。文献[5]将SMPGs与MMC结合,提出了一种MMC串联结构(Modular Multilevel Converter Microgrids,MMC-MG)的微电网。目前,基于该结构的微电网系统已有输出特性分析、微源协调控制等研究。而微源出力波动会引起MMC-MG 相间功率不平衡,使孤岛系统无法稳定运行。因此,对相间功率进行平衡控制是非常有必要的。
在传统微电网中,相间功率流动需功率平衡装置,增加了其设备投资。文献[6]为解决由于分布式电源出力波动和负载不一致引起的相间功率不平衡问题,提出能量协调控制策略使三相功率趋于平衡。文献[7]为解决分布式电源输出功率波动引起的相间功率不平衡问题,提出对三相独立下垂控制的策略。通过变流器为相间潮流平衡控制提供了可能,使三相功率得到动态自适应调整。文献[8]针对三相不平衡的微电网,提出了基于分段下垂的自治分布式储能系统与区域能量均衡策略的协调控制方法。抑制了三相功率不平衡,并提高了能源利用率。在MMC储能系统中,文献[9]研究了注入直流环流的控制策略。由每相功率与平均功率之间的差值及直流侧电流,计算出环流注入值,通过控制使相间功率得到均衡。
本文在负载不平衡条件下,首先对系统输出电压进行稳定控制。在此前提下,提出基于有功功率修正的相间功率控制策略,通过不平衡功率计算出修正调制信号,利用对直流环流的控制,将其叠加至上、下桥臂的原调制信号中,借助环流使相间功率能够自适应的动态调节。在提高微源利用率的同时,提高了系统稳定性。
2 MMC-MG孤岛拓扑结构
孤岛模式下MMC-MG 拓扑如图1 所示。GM是发电单元,由MMC 半桥模块、微源、交直流变换器、储能装置ES 组成的。每相包括上、下两个桥臂,各桥臂是由N 个GM 和1 个L 串联而成,结合MMC 拓扑组成三相逆变环节,经LC 滤波器与三相负载相连。
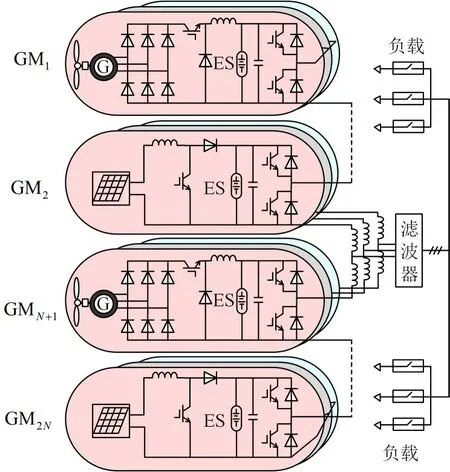
图1 MMC-MG孤岛拓扑结构
3 孤岛模式下输出功率数学建模
在孤岛模式下MMC串联结构微电网系统等效电路图如图2 所示。其中L、R 分别为桥臂电感及等效电阻;im(m=A,B,C)为输出电流;iPm、inm分别为m 相上、下桥臂电流;uPmi、unmi分别为m 相上、下桥臂第i(i=1,…2N)个子模块电压;Rm为三相星型阻性负载;Lf、Cf分别为滤波电感和电容;um为电容电压;icirm为三相环流。

图2 MMC-MG孤岛等效电路
若设某相调制波为uref=Msin(ωt+φ),GM 的直流链电压在储能装置作用下稳定,忽略其电压偏差,则某相GM输出电压可表示为
式中,ud为GM的直流链电压;ω为角频率;M为调制比;φm为初始相位。
由KCL得桥臂电流、环流及逆变侧电流满足:
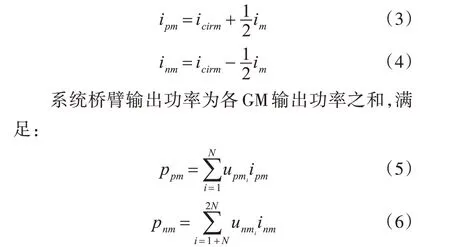
而各相输出功率为上、下桥臂功率之和,结合式(3)、式(4)可表示为
从(7)式中可看出,m 相输出功率由两部分构成。因此,分别定义为环流功率和负载功率。
在MMC 串联结构微电网系统中,三相环流当中存在直流、基频、二倍频成分[10]。经过对相间环流产生机理的分析可知,当每相的桥臂电压偏差相等且发电单元GM 直流链电压稳定时,环流中只存在直流环流。
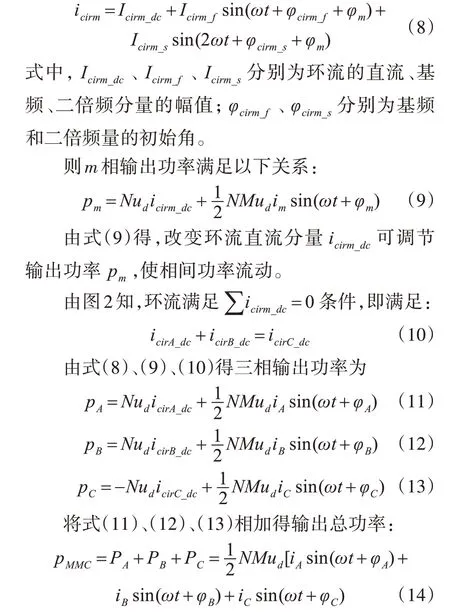
式中PMMC为MMC逆变器输出功率。由式(14)知,相间环流产生的功率相互抵消。所以,MMC 逆变器输出功率由负载功率决定。因此,选择合适的控制策略使环流功率在三相之间流动,而不影响输出功率。
4 控制策略
当三相之间功率不平衡时,在满足本相负载所需功率的条件下,将剩余的功率利用对环流直流分量控制,传递到功率不足的相。由于MMC-MG 系统中负载的大小不相等,导致逆变侧输出电压不对称[11~12]。所以,研究不平衡负载条件下MMC-MG相间功率平衡问题,前提要保证输出电压对称。
综合以上分析,MMC-MG 系统总体控制策略示意图如图3所示。

图3 总体控制策略示意图
4.1 基于DSC的输出电压控制策略
针对负载不平衡导致MMC-MG 输出电压不对称问题,需采用相应控制策略来进行控制。由图2知,MMC 逆变器三相三线制连接,所以可忽略零序分量,而正、负序量用信号延迟对消技术(DSC)进行分离[13]。因此,通过对其正、负序分量独立调节和控制,以此来代替传统电压外环控制,而电流内环控制依旧用传统控制方法。
系统运行时,MMC-MG 系统输出电压um经DSC 算法后的到αβ坐标系下正序分量uαβ+和负序分量uαβ-。之后经派克变换得到dq 坐标系下正、负序量为udq+、udq-,对其进行独立控制,将控制输出量相加得电流内环参考值。电流内环控制输出值经坐标反变换得MMC-MG 的调制波。其控制框图如图4所示。

图4 基于DSC的输出电压控制框图
4.2 基于APC的相间功率平衡控制策略
对于图1 所示的孤岛微电网系统,微电网系统内的功率平衡表达式为
当每相微源出力不平衡时,为描述相间功率协调思路,图5给出了功率模式分析图。
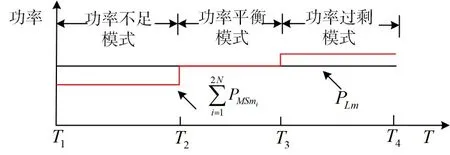
图5 功率模式分析图
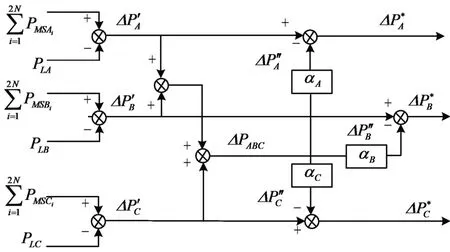
图6 基于APC的功率平衡控制原理
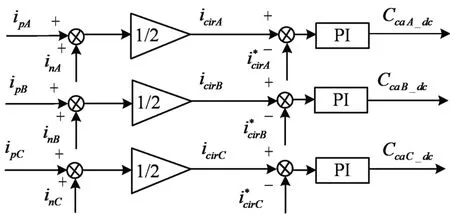
图7 环流控制器
若微源功率与负载功率之差在T1~T2时间段内,属于功率不足模式,则需将过剩相的盈余功率传输至该相,满足:
若微源功率与负载功率之差在T2~T3时间段内,属于功率平衡模式,不参与功率协调,满足:
若微源功率与负载功率之差在T3~T4时间段内,属于功率过剩模式,需要将该相盈余功率传输至功率不足相,其它相平衡时可借助储能系统进行存储,满足:
对于三相之间的功率协调情形,可根据三相微源输出功率和负载功率之间的差值有33=27 种。
以微源输出功率与负载功率之差为依据,确定每相储能装置所补偿或吸收的功率∆。
由式(20)得A、B、C 三相储能总调节功率∆PABC满足:
由于负载不相等,导致负载功率不相等,因此每相需要储能补偿或者吸收的功率相差较大。因此,通过对各相负载功率所占总负载功率的比例来进行分配。定义A、B、C 三相的分配比例系数为αm。
根据式(21)与式(22)得每相储能占总调节功率的功率量∆满足:
4.3 相间环流控制策略
MMC-MG 系统没有公共的直流母线,经分析,相间环流是由每相端口电压差产生。要对相间环流进行控制,则需要在调制信号中增添合适的补偿量,控制环流的直流分量达到相间功率平衡的目的。

5 仿真验证
为验证相间功率平衡控制策略,搭建孤岛模式下MMC-MG 系统仿真模型。桥臂微源数为N=4;C=4400 μF;fc=4kHz;L=0.03H;GM 的直流链电压ud为160V;三 相 星 型 阻 性 负 载RA=RC=8Ω ,RB=16Ω。并采用CPS-SPWM(载波移相调制)来确保GM投入的数目为4。
图8与图9分别给出了采用输出电压控制策略后的系统线电压及相电流波形。由图可知,系统孤岛模式下接不平衡负载时该策略能使三相输出电压对称,为相间功率平衡控制打下基础。

图8 系统线电压波形

图9 系统相电流波形
首先,验证环流控制策略的有效性,未加入控制策略时,时间范围(t/s)和环流参考值(/A)如下。

表1 环流参考值
从图10 中可以看出,相间环流跟随其给定的参考值变化,证明了控制器的有效性。
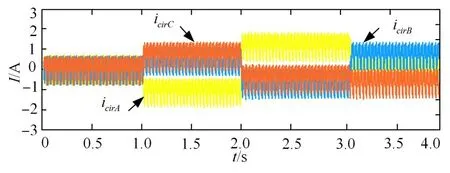
图10 相间环流波形
其次,验证相间功率平衡控制策略的有效性。改变影响微源出力的因素来模拟微源相间功率不平衡,加入相间功率平衡控制策略对其进行控制。
图11~14分别给出了系统三相负载功率、A、B、C 三相的GM 输出功率、微源输出功率的验证波形。从图11 可看出,系统三相负载功率分别为PLA=PLC=8.4kW、PLB=4.2kW。从图12~图14可看出,各相的GM 输出总功率随微源总出力变化而变化。分析可知:在0s~1.0s时间段内,A、B、C 三相GM 总出力分别为9.2kW、3.6kW、8.2kW,通过相间功率交换,A 相总出力上升,B 相与C 相总出力下降,功率由A 相传输至B 和C 两相;在1.0s~2.0s 时间段内,C 相总出力上升,A 相与B 相总出力下降,通过控制策略使功率由C 相传输至A 和B 两相;在2.0s~3.0s时间段内,B 相总出力上升,A 相与C 相总出力下降,功率由B 相传输至A 和C 两相。因此,实现了相与相之间的功率交换,达到了相间功率平衡控制的目的。
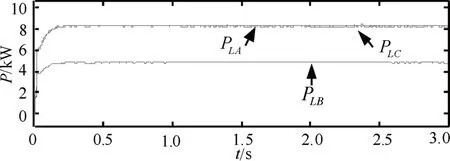
图11 三相负载功率波形

图12 A相GM及微源输出功率波形

图13 B相GM及微源输出功率波形
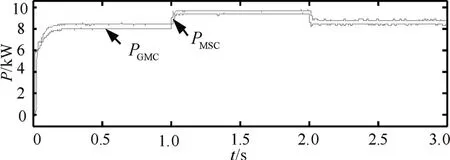
图14 C相GM及微源输出功率波形
6 结语
针对孤岛模式下MMC-MG 系统,由于微源出力具有间歇性和随机性,并且微源根据MMC 结构串联而成这一特点,使系统相间功率不平衡问题严重。为此,文中在负载不平衡条件下,首先研究了基于DSC算法的输出电压控制策略,保证了系统孤岛模式下输出三相对称电压。在此基础上,提出了一种基于有功功率修正的相间功率平衡控制策略。以微源功率与负载功率之差作为根据,计算出每相需要修正的功率,进而得到直流环流参考值。最后利用对直流环流的控制来促使相间功率流动。仿真验证了其控制策略能够很好地控制相间功率互济,使相间功率得到动态自适应调节,提高了微源利用率和运行稳定性。