管道机器人超声测量轮廓重建方法的研究
2024-04-17陈宣烽邹大鹏陈少伟孙晗吴磊刘建群
陈宣烽,邹大鹏,2,陈少伟,孙晗,2,吴磊,2,刘建群,2
(1.广东工业大学机电工程学院,广东广州 510006;2.广东工业大学,广东省计算机集成制造重点实验室,广东广州 510006;3.广东工贸职业技术学院,广东广州 510550)
0 前言
随着长距离输水及供水工程增多,大尺寸、大流速、长距离的输水管道被大量用于大型跨流域水利工程[1]。以珠江三角洲水资源配置工程为例,采用管径为DN4800~DN8500的大尺寸管道[2],在输水过程中内部容易滋生淡水壳菜,堵塞原水输水管道造成重大损失,因此需要在管道输水过程中进行检测[3]。水下机器人具有防水、耐压及携带大量传感器的优点[4],越来越多地被应用于管道检测。
在管道检测中,目前应用在管道附着物的测量方法无法准确得到管道内的三维图像并呈现管道内部状态[5]。其难点有两方面:(1)管道内水流有较大的流速,水流的冲击会使管道机器人产生偏移,造成检测结果偏差;(2)管道内部地面不平,机器人前进机构工作时的移动会产生偏移和偏转,造成检测结果偏差。以上偏差会使超声测量轮廓中心发生变化,使得测量轮廓产生变形失真,并非真实轮廓,直接影响三维轮廓的真实构建。需要消除机器人运动偏移和偏转,对已经产生偏差的轮廓进行重建,获得真实轮廓,准确展现管道内部的实际状态。KIM、PARK[6]采用基于相似原理的管道漏磁检测的重建方法,通过估计漏磁信号与实际采集信号的相似程度,完成轮廓重建。韩浩宇等[7]提出基于激光检测的三维轮廓重建技术,采用数据点配对的方式,通过ICP算法完成轮廓重建。刘立波等[8]提出基于亚像素定位技术的管形内轮廓三维重建方法,通过定位光斑点获取轮廓偏差,完成轮廓重建。但是在输水管道内,内壁附着物会影响两个截面点集之间的距离,而且管道内不均匀的光线和快速流动的水流会导致检测包含大量噪点,采集到的管道信息不清晰[9]。所以以上几种方式都不适用于输水管道检测。而轮廓重建又是大型管道内的生物附着状态检测的必要条件,因此迫切需求一种水下管道轮廓检测的重建方法。
超声测量相比于其他测量方式,具有检测精度高、能够适用于不同管径和复杂环境的优点[10-11]。本文作者提出一种基于齐次变换矩阵的高精度超声轮廓重建方法,利用超声测量方式,基于管道机器人检测到的超声检测单元中心偏离圆心的偏差信息,对已经偏离的轮廓进行重建。搭建实验装置开展偏移偏差和偏转偏差的实验测量,实验结果表明该方法能够将偏移轮廓的坐标校正回实际轮廓的坐标,纠正管道机器人行走定位偏差导致的测量轮廓错误,提高检测精度。
1 管道超声检测系统的工作原理
管道超声轮廓测量的方法是采用管道机器人载体在管道底部平台上行走,通过搭载管道超声检测系统进行轮廓测量,构建管道内部轮廓,判断管道内部状态。测量系统结构组成如图1所示。由于管道机器人的运动测控偏差、水下管道结构状态偏差,在水下管道中移动不可避免偏离管道中心轴线,因此通过管道内部超短基线定位或者预埋轨迹磁条等方式对管道机器人进行定位测量,控制其按照预设的轨迹运动,结合九轴传感器获得位置偏移和偏转等偏差,用于校正超声轮廓测量失真,实现轮廓重建。
管道超声检测的原理是基于超声回波测距法,通过向管壁发射超声波信号,得到轮廓以及轮廓附着物的回波信号,通过分析回波信号,得到指定角度的距离信息。系统采用渡越时间法(Time of Flight,TOF),通过检测发射信号与回波信号之间的时间差,即渡越时间,求得轮廓位置[12],如图2所示。通过控制旋转角度α,获得轮廓截面与检测中心的方位和距离信息r。此方法原理简单,抗干扰性较好,测量范围大,当超声波遇到管壁后反射所产生的回波信号不发生严重变形。该方法总能得到比较精确的估算结果。

图2 基于渡越时间法的管道超声检测原理
距离r由回波的时间差Δt和传播介质中的速度v决定,满足如下公式:
(1)
管道中水通常为均匀介质,声速v为常数,与温度有关,满足如下公式[13]:
v=155 7-0.024 5(74-T)2
(2)
其中:T为温度,范围为0~30 ℃。
轮廓任意点的检测距离r和角度α关系如下:
k=r(cosα+isinα)=reiα
(3)
式中:r和α是对应于非零复数k=x+iy的点(x,y)的极坐标,因为x=rcosα,y=rsinα,所以k可以写成如上形式。
2 管道超声测量轮廓重建方法的研究
利用管道超声检测系统搭载在机器人载体上的方式,可以确定如下3个中心:管道起点O,超声检测单元中心点S,管道机器人载体中心点R,如图3所示。
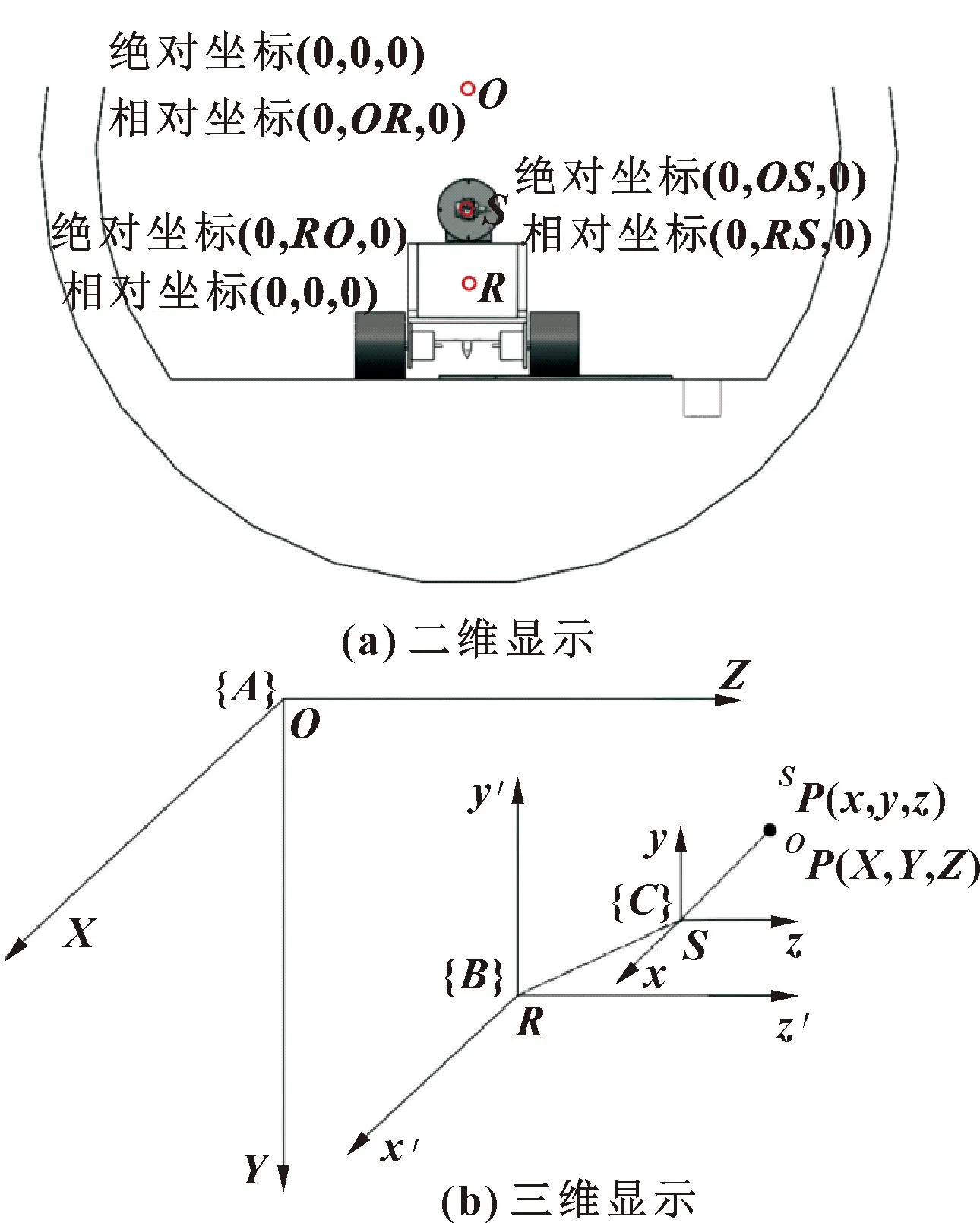
图3 管道超声检测的坐标中心及坐标系
其中绝对坐标是基于起点O的起点坐标系{A}(O-XYZ)下的显示,相对坐标是基于中心点S的传感器坐标系{C}(S-xyz)下的显示。RS是管道机器人载体中心点R与超声检测单元中心点S之间的固定距离,RO是管道机器人载体中心点R与管道起点O之间的初始距离。若超声检测单元点S和管道起点O的中心线在一条线上,则称此时点S的检测轮廓为构建轮廓。而在管道超声检测过程中,点S和点O很难保持在一条线上,地面的起伏与水流的冲击以及机器人运动控制偏差等会导致点R相对于坐标系{A}发生变化,超声检测的结果因为点R发生变化从而导致坐标系{B}上固定距离的传感器坐标系{C}发生变化,而管道起点O固定不变,所以最终检测结果需要变换到坐标系{A}下进行轮廓重建。

(4)

(5)



图4 管道超声测量轮廓重建原理
管道机器人在正常运行中,一般既有偏移偏差又有偏转偏差,称为复合偏差,在遇到复合偏差时需要先进行偏转重建,再进行偏移重建。在管道内遇到上下坡、拐弯时,通过九轴传感器测量得出的θ、φ、ψ并不能真实反映机器人相对于管道轴线θ、φ、ψ,此时可根据九轴传感器中的加速度传感器进行倾角补偿[14],得出真实的ψ,再根据式(4)将检测轮廓重建为实际轮廓。
3 管道超声测量轮廓重建方法的实验测量
为验证超声测量的轮廓重建方法的准确性和精度,建立管道超声测量实验装置,在获得偏移和偏转的位置偏差情况下,分析管道轮廓复原至真实状态轮廓的能力。为减小实验中其余影响因素的干扰,简化超声测量的轮廓重建实验流程如下:
(1)实验是搭载没有运动状态的载体进行检测,点R和点S在垂直轴线切面重合,RS=0;
(2)管道中心点O与载体中心点R在垂直轴线切面重合,OR=0;
(3)超声检测单元点S与管道中心点O的位置默认已知。

(6)
在实验中超声检测单元点S与管道中心点O通过钢尺和探头超声测量,保证在探头的精度范围内点S和点O近似重合,后续通过移动或旋转静态载体获取点S位置偏差。
3.1 实验准备与流程
搭建一套管道超声测量实验装置,对基于齐次变换矩阵的轮廓重建方法进行实验验证。具体实验装置如图5所示。
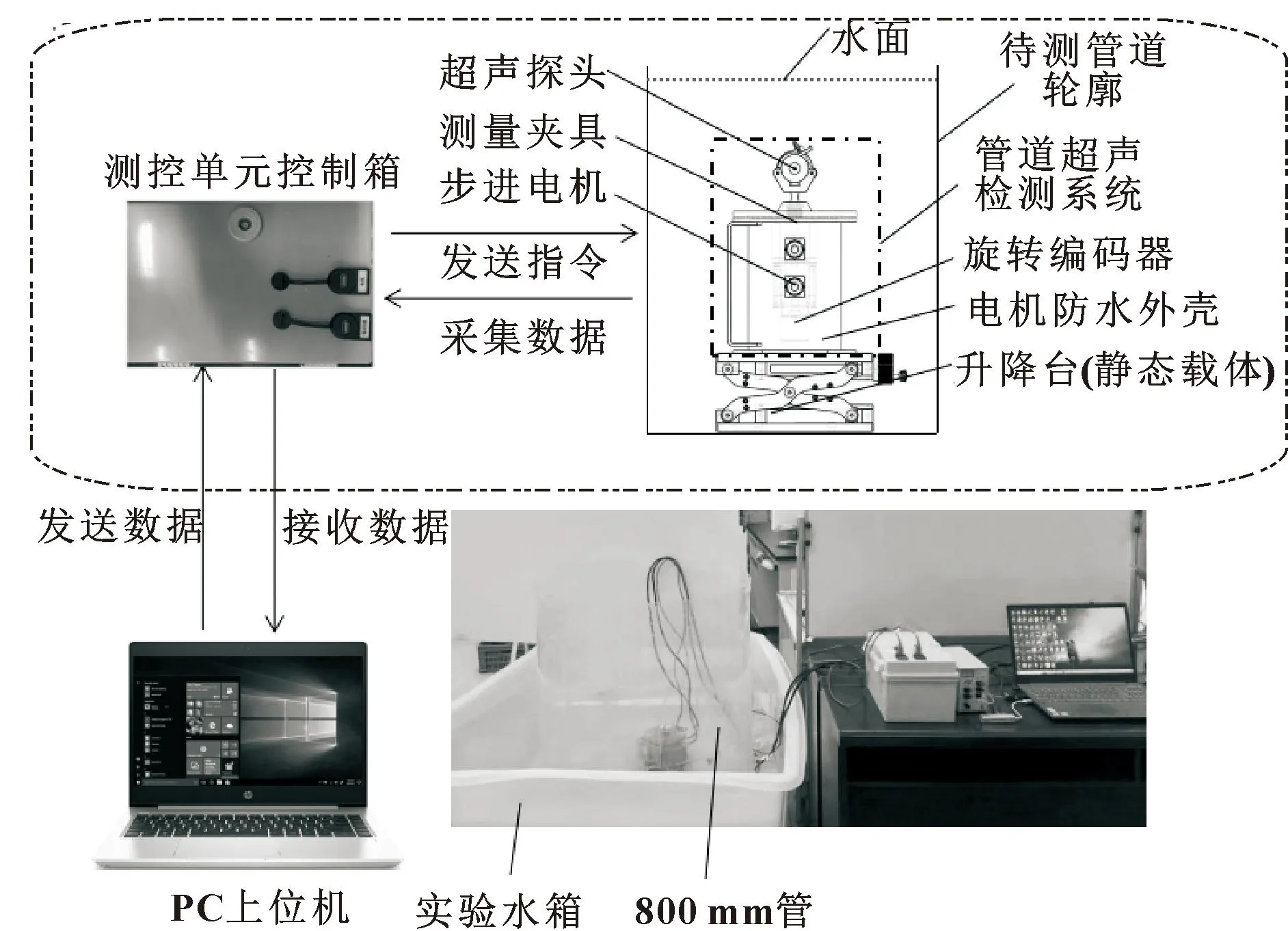
图5 管道超声测量实验装置
超声探头选用收发一体化防水超声换能器,其具体参数如表1所示。其内部自带滤波模块,可以有效减小高噪声产生的影响。

表1 超声探头参数
实验采用1 360 mm×940 mm×610 mm的水箱作为实验环境,模拟管道选用尺寸φ800 mm×1 000 mm的亚克力圆管作为检测对象,超声探头的测量距离为探头表面到圆管的距离,实际测量距离为380 mm,如图6所示。
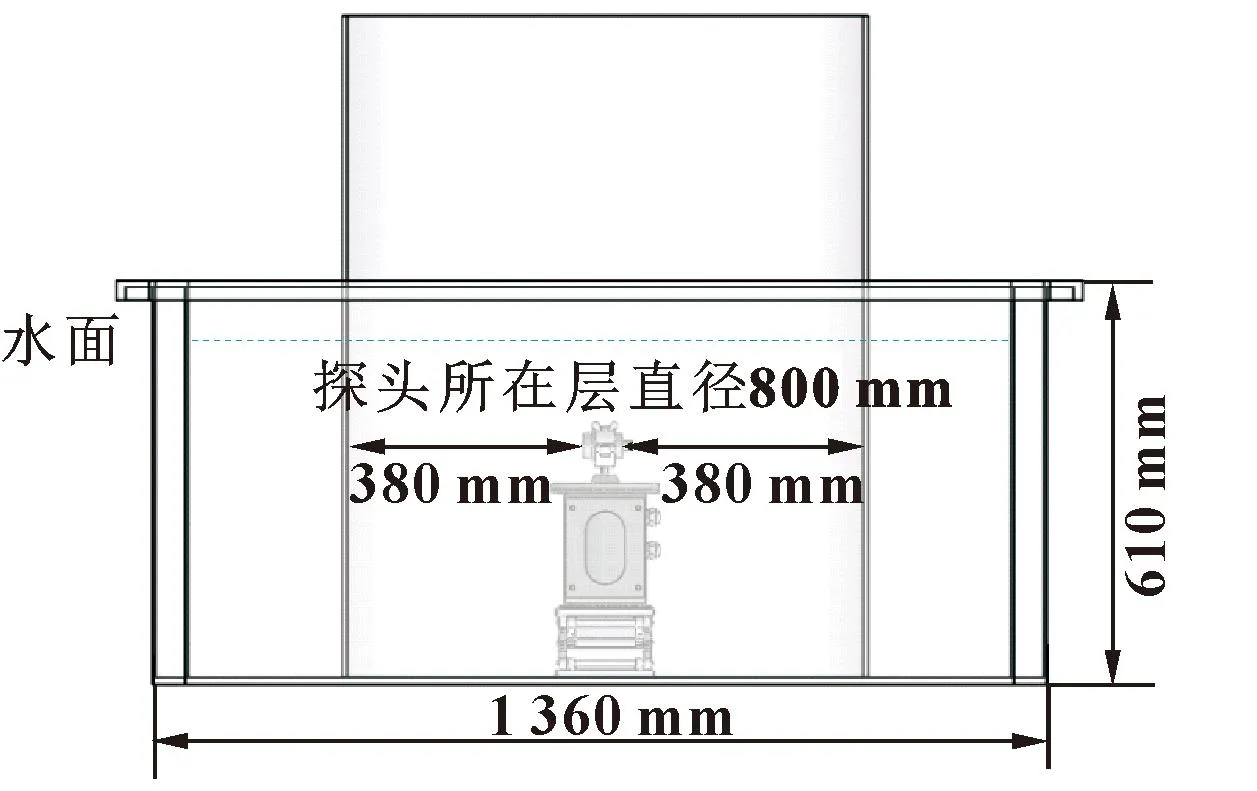
图6 偏移偏差轮廓测量实验
实验条件:实验采用的电机控制转速1 r/min,每次旋转360°。超声探头的探测周期0.1 s,脉宽0.01 ms,脉冲频率378.8 kHz。对每组实验分别测量5次,取平均值。如无特殊说明,均采用以上基本实验条件。具体实验流程如下:
(1)管道轮廓超声测量系统放置于管道中间,当超声检测单元处于圆心位置时,进行正常轮廓检测;
(2)移动静态载体,将超声检测单元偏离圆心位置,再进行检测,获得偏移检测轮廓;
(3)静态载体倾斜一定角度,将超声检测单元放置在圆心位置进行检测,获得偏转检测轮廓;
(4)将检测得到的图像在MATLAB中分别进行轮廓构建和重建,最终得到真实的管道检测图像。
3.2 偏移偏差轮廓测量实验
根据以上实验流程进行偏移重建实验,最终得到以下数据结果。当超声检测单元点S处于圆心点O位置时检测所构建轮廓如图7所示。

图7 正常检测轮廓


图8 偏移偏差重建轮廓
根据对比轮廓可以发现检测绝对误差1为66 mm,相对误差1为17.4%,误差有显著增加。经过偏移重建后,偏移所造成的绝对误差由66 mm下降为9 mm,相对误差由17.4%下降为2.36%。说明基于齐次变换矩阵的轮廓重建方法,能够减小偏移检测误差。
3.3 偏转偏差轮廓测量实验
根据以上的实验流程进行偏转实验,当静态载体沿x正方向倾斜15.8°后,再次调整超声检测单元点S位置,确保其处于管道圆心点O位置,如图9所示。

图9 偏转偏差轮廓测量实验
根据检测出的数据构建轮廓如图10所示。

图10 偏转检测轮廓

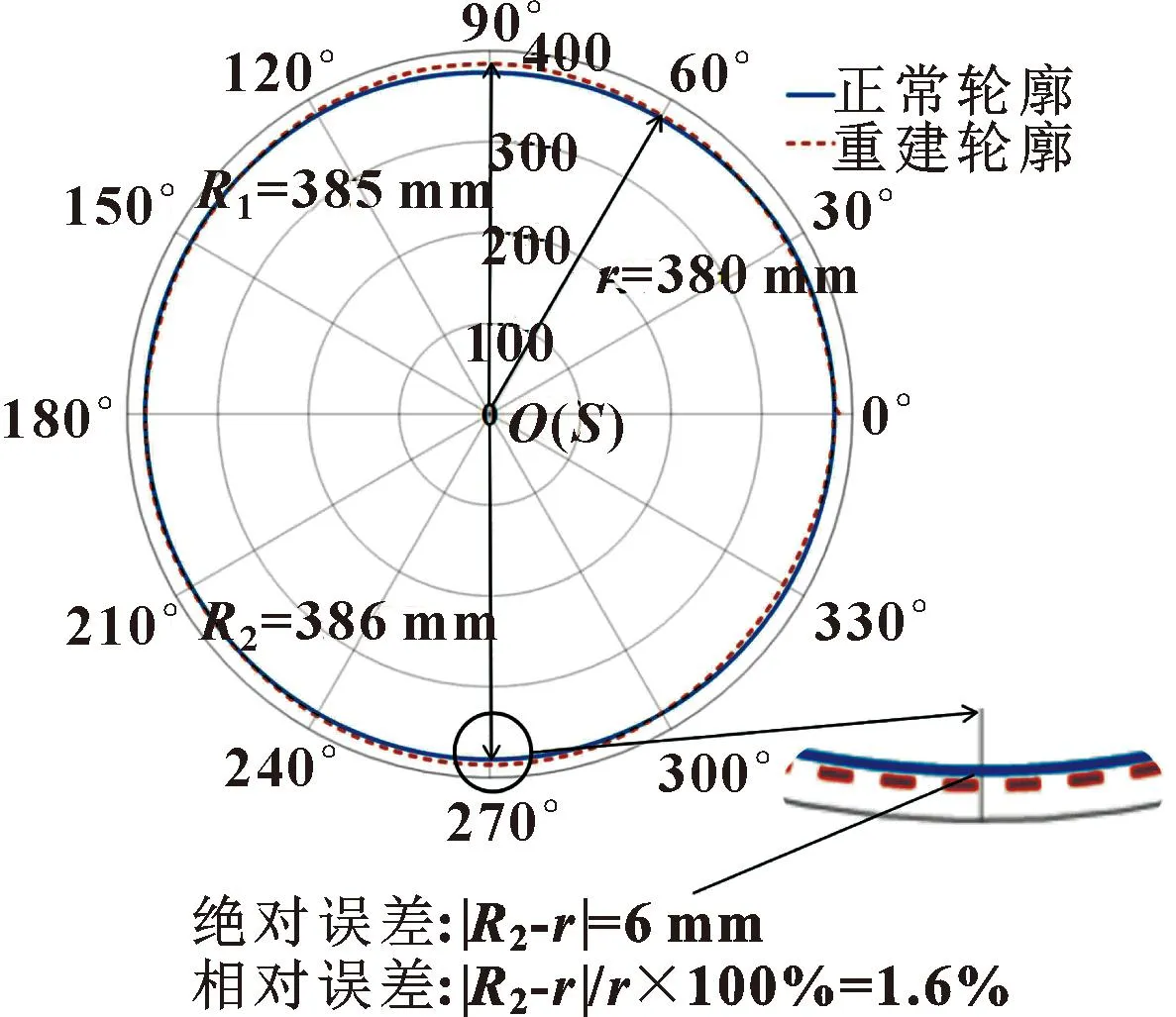
图11 偏转偏差重建轮廓
通过轮廓对比分析,重建后偏转所造成的绝对误差由16 mm下降为6 mm,相对误差由4.2%下降为1.6%,说明基于齐次变换矩阵的轮廓重建方法能够减小偏转检测误差。
偏移和偏转后重建检测轮廓仍存在6~9 mm的误差,是由超声检测系统的分辨率导致的,后续可以通过提高超声检测系统的分辨率提高轮廓检测精度。
4 结论
本文作者提出一种管道机器人超声测量轮廓重建方法,并通过搭建实验装置进行实验验证,得到如下结论:
(1)管道机器人运动偏移会使得轮廓测量产生偏移现象——检测轮廓和正常轮廓之间发生的移动。管道机器人运动偏转会使得测量轮廓产生偏转现象——检测轮廓和正常轮廓之间发生的转动。
(2)搭建的管道超声测量实验装置对超声测量轮廓实现检验和完善,偏移重建的绝对误差为9 mm,相对误差为2.36%,偏转重建的绝对误差为6 mm,相对误差为1.6%,误差落在超声检测系统的厘米级分辨率之内。后续可以基于更高采样频率的超声探头、更加稳定的行走机构提高超声检测系统的分辨率,提高轮廓检测精度。
(3)基于齐次变换矩阵的轮廓重建方法,既可以应用于管道轮廓检测,也可以应用于基于轮廓的自动定心和水下机器人的对中运动控制,具有良好的应用前景。
