BLDCM 控制系统霍尔位置传感器故障诊断与保护研究
2024-04-16刘少龙张煜辰李仑升
刘少龙,张煜辰,李仑升
(中国航空工业集团公司西安航空计算技术研究所,陕西 西安 710076)
0 引 言
无刷直流电机(Brushless Direct Current Motor,BLDCM)控制系统作为高度机电一体化的设备,主要包含电机本体、控制器、转子位置传感器3 个部分[1-3]。在精度要求较高的应用场合下,通常使用位置编码器、旋转变压器等作为转子位置传感器。这类传感器能有效提高系统的控制精度,但其控制算法相对复杂且成本高[4]。由于霍尔位置传感器具有控制算法成熟、硬件电路简单、成本低廉以及工作可靠等优点,广泛应用于航空航天、工业控制、医疗器械等领域[5-6]。文章仅探讨采用霍尔位置传感器的BLDCM 控制系统,并对霍尔位置传感器的多种故障模式进行深入研究,寻求有效的故障定位和保护方法。
由于实际工作环境复杂多变,霍尔转子位置传感器可能产生开路、短路、物理损坏等多种形式的故障。这些故障会直接影响控制器,使其无法获取正确的电机转子位置信息,导致电机工作异常,使整个控制系统无法正常工作。因此,文章重点分析和研究霍尔转子位置传感器故障,寻求一种有效的故障诊断和保护技术。
1 霍尔位置传感器故障分析
霍尔位置传感器通常安装在电机内部端盖上,且传感器数量需要与控制的电机绕组相数匹配,各传感器在空间上相隔的电角度为120°。文章以三相星型六状态BLDC 电机为例进行分析。
1.1 霍尔位置传感器开路故障
以单个霍尔位置传感器HA 开路时的情况进行说明。当HA 开路时,该相传感器输出信号始终为低电平0,不再有高低电平的跳变。此时三相霍尔传感器输出波形和电机三相绕组电流波形如图1 所示。

图1 HA 短路故障换相波形
由图1 可知,A 相霍尔传感器在故障点时刻发生开路故障,故障前后HA 信号电平发生变化,经逻辑合成后的驱动信号也立刻发生改变,导致提前换相。新合成的换相信号驱动开关管VT6 关断的同时,打开VT1、VT2,且该状态的持续时间大于正常换相间隔。在电角度为60°~240°时,HA 开路故障前后三相霍尔信号完全相同,定子绕组和开关管完成2次正常的换相过程。当转子的电角度达到240°时,功率管VT3、VT4 仍保持导通状态不发生换流。转子继续旋转至300°电角度的位置时,三相霍尔信号均为低电平,合成的驱动信号关断6 路功率管,定子绕组无电流通过。转子在惯性作用下仍继续旋转,当电角度达到360°时,根据该时刻霍尔信号产生的驱动信号开通功率管VT1、VT2,完成一次换相,此时转子转过一个完整的电周期。
由三相绕组电流波形可知,HA 开路故障后的一个电周期内,在一定时间内出现6 个功率管全部关断的状态。A相电流ia基本不变,B、C两相电流有效值减小,且B相绕组仅通过正向电流,C相绕组仅通过反向电流。
当两相霍尔传感器同时发生开路故障时,电机会因为无法产生正常的换相信号,导致三相绕组电流的幅值显著下降[4-6]。在一个电周期内,绕组电流将迅速下降,使得电机在额定负载下的转速迅速降为0。
1.2 霍尔位置传感器对电源短路故障
以单相霍尔位置传感器HA 对电源短路为例进行说明。当HA 发生短路时,其输出信号始终为高电平1且保持不变。与霍尔传感器开路故障类似,在发生短路故障后的一个电周期内,霍尔信号有一半的时间正常,电机可以正常换相并工作。但也会出现6 个功率管全部关断的运行状态和不正常的换相状态。当电机在额定负载或较重负载下运行时,流过绕组的电流会减小,导致电磁转矩减小,致使电机在工作一段时间后停止转动。
2 故障诊断和定位方法
对三相霍尔位置传感器输出信号的不同状态进行编码,得到8 个不同的霍尔信号状态编码值FHall。当电机正常换相时,霍尔状态编码值FHall共有6 个不同的状态值,且由6、2、3、1、5、4 的顺序构成一个完整的换相周期,6 个不同的状态值分别对应6个不同的换相状态。当出现霍尔开路或短路故障时,FHall值为0或7。通过分析单相霍尔电源短路,得出A、B、C 三相霍尔信号出现电源短路故障时,FHall状态编码值的变换情况如表1 所示。
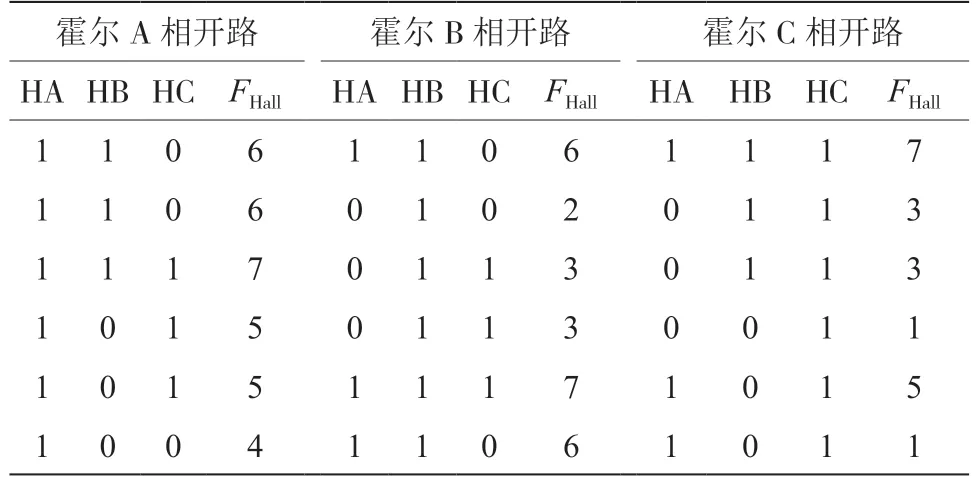
表1 单相霍尔电源短路FHall 编码值
由表1 可知,当发生单相霍尔电源电路故障时,在一个电周期内FHall信号不再为连续不同的6 个状态值,且会出现独有的故障编码值7。因此,若要将故障定位至具体的霍尔传感器位置,则分析发生电源电路故障时FHall的变化情况。
第一,定义霍尔故障状态4 元素数组SH={S1,S2,S3,S4},即发生霍尔故障后实时采集的4 个变化的霍尔状态,且Si≠Si-1(其中i=2,3,4)。第二,在电机运行过程中,实时监测霍尔状态编码值FHall。正常工作时数组SH中不储存数据,当FHall=7 时,立刻诊断系统是否发生霍尔开路故障,并将故障信息上传。同时,将FHall值存入数组元素S1中,并连续采集3个FHall值,分别存入数组SH的元素S2、S3、S4中。采集4 个霍尔状态编码值便可得到一个霍尔故障状态数组SH,将数组中的4 个元素按照从小到大的顺序进行排列,得出4 个元素中的最小值Smin,根据表2便可定位具体的故障模式。

表2 单相霍尔对电源短路故障和开路故障定位
霍尔单相开路的故障诊断和定位与霍尔单相对电源短路类似。不同之处在于,霍尔单相开路故障标志为FHall=0。当检测到FHall值为0 时,诊断系统发生霍尔单相开路故障。同时,将此时的霍尔状态编码0写入数组SH的S1元素中,并继续采集前后不等的3个霍尔状态编码,得到霍尔故障状态数组SH。此时,需要将SH中的4 个元素按照从小到大的顺序排列,并得出最大的元素,记为Smax。根据不同的Smax值,即可完成单相霍尔开路故障定位。单相霍尔对电源短路故障和开路故障定位如表2 所示。
3 仿真与分析
3.1 单相霍尔对电源短路故障的定位和保护仿真
通过仿真分析单相霍尔HA 短路故障,可得出霍尔信号和电机关键参数波形如图2 所示。
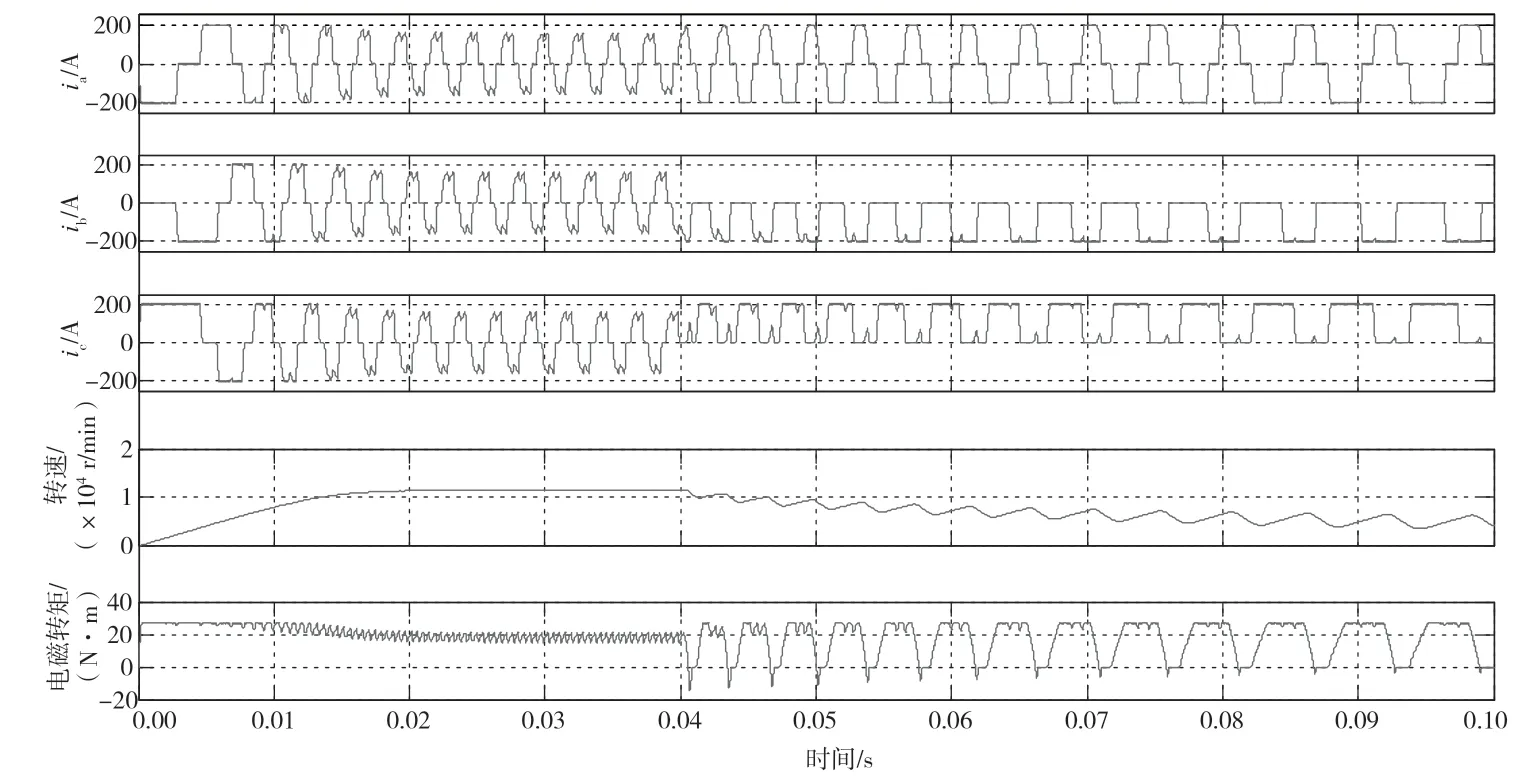
图2 单相霍尔HA 短路故障仿真波形
由图2 可知,系统在0.02 ~0.04 s 处于稳定状态,正常运行;0.04 s 时刻HA 突发电源短路故障。故障发生后,HA 信号始终保持在高电平状态,且霍尔状态编码值FHall为7。在一个电周期内,B 相绕组电流只通过反向电流,C 相绕组只通过正向电流,且电角度为60°时三相绕组均不导通,转速明显下降并出现波动。在闭环控制作用下,脉冲宽度调制(Pulse Width Modulation,PWM)调制波占空比增大,三相电流幅值达到限定幅值200 A。
3.2 单相霍尔开路故障的定位和保护仿真分析
单相霍尔开路故障的定位和保护仿真波形与图2类似,区别是发生开路故障后控制器会检测到霍尔状态编码值为7,此时控制器会立即进入故障定位程序。在故障定位程序中,连续采集4 个不同的霍尔状态编码值,并对其进行升序排列,确认故障处于哪一相绕组。完成故障定位后,控制器通过另外两相正常的霍尔状态信号进行相应的逻辑运算,并对故障相霍尔信号进行修复,采用修复完成的霍尔信号可使BLDC 电机在霍尔开路故障下持续运行。霍尔信号的修复运算需考虑故障发生后故障相对两相正常霍尔信号的影响,仅需在修复运算中添加相应的转速校正环节。
4 结 论
文章提出的针对单相霍尔短路故障和开路故障2种常见的霍尔故障诊断、定位和修复方法,可有效提高BLDC 系统的故障容错能力,确保系统工作的可靠性和安全性,对工程应用具有显著的指导价值。
