基于改进YOLOv5的交通标志小目标检测算法
2024-04-14刘振渤李慧刘桥缘胡蓉
刘振渤 李慧 刘桥缘 胡蓉
DOI:10.19850/j.cnki.2096-4706.2024.01.019
收稿日期:2023-05-17
摘 要:针对交通标志小目标和密集目标检测准确率不高的问题,提出了改进YOLOv5s的检测模型。在Backbone网络中添加ECA注意力机制增强小目标交通标志特征信息提取能力;其次采用SPPCSPC结构减少小目标交通标志信息丢失;再使用BiFPN网络融合多尺特征信息,增强融合感知能力;最后将WIoU作为训练时模型的损失函数,降低背景的过度干扰,提升交通标志检测的准确性。试验结果表明,改进后算法的准确率为93.3%、mAP值为92.7%,较未改进前分别提高了2.2%、1.7%。
关键词:交通标志小目标;YOLOv5s;ECA注意力机制;SPPCSPC模块;WIoU loss
中图分类号:TP391.4 文献标识码:A 文章编号:2096-4706(2024)01-0094-06
Traffic Sign Small Target Detection Algorithm Based on Improved YOLOv5
LIU Zhenbo1, LI Hui1, LIU Qiaoyuan2, HU Rong1
(1.Xihua University, Chengdu 610039, China;
2.Traffic Police Corps of Sichuan Provincial Public Security Department, Chengdu 610000, China)
Abstract: Aiming at the low detection accuracy of traffic sign small targets and dense targets of traffic signs, an improved YOLOv5s detection model is proposed. It adds ECA attention mechanism to enhance feature information extraction ability of traffic sign small target in Backbone network. Secondly, it adopts SPPCSPC structure to reduce information loss of traffic sign small target. Then, it re-uses BiFPN network to fuse multi-scale feature information to enhance the fusion perception ability. Finally, WIoU is used as the loss function of the model during training to reduce excessive interference of background and improve the accuracy of traffic sign detection. The experimental results show that the accuracy of the improved algorithm is 93.3%, and the mAP value is 92.7%, which is 2.2% and 1.7% higher than before, respectively.
Keywords: traffic sign small target; YOLOv5s; ECA attention mechanism; SPPCSPC module; WIoU loss
0 引 言
目前,自動驾驶汽车正处于技术迅速演进的关键时期,交通标志识别作为其感知道路环境信息的关键要素,与降低交通事故发生率、减少交通安全违法行为等息息相关。对于远距离交通标志的精准检测有利于提前做出正确决策和判断,规避道路风险。但远距离的交通标志目标较小,所含信息量少,检测难度大。因此,降低交通标志小目标的误检漏检,提高其识别精度,逐渐成为当下研究的热点。
交通标志检测方法有颜色信息检测、形状特征检测和多特征融合的传统检测方法。张卡盛等[1]利用统计理论对标志几何信息进行计算,并将结果作为图像的全局颜色特征来实现自适应图像分割。郝博闻等[2]采用了模板匹配法进行形状识别,利用模板在感兴趣区域上移动来获取最大相似值,从而实现交通标志检测。Yakimov[3]和苗丹等[4]则采用了霍夫(Hough)变换来检测交通标志。于平平等[5]通过提取图像预处理后的颜色、亮度等特征,并采用线性组合获取显著图和交通标志的感兴趣区域(ROI),最后根据几何特征对ROI中形状进行检测。传统的交通标志检测方法存在诸多局限性,其在小目标交通标志检测上的实时性、精确性已不满足自动驾驶的要求。
近年来计算机视觉领域不断取得突破,目标检测方法逐渐向更具优势的深度学习方法转变。随着R-CNN[6]、SPP-Net[7]、SSD[8]、YOLO[9]等系列检测模型的出现,众多学者将其用于交通标志小目标检测领域,有效提高了检测效率和精度。YANG[10]等为了更好地提取小目标的特征信息,利用深度可分离卷积代替YOLOv3-tiny原有卷积构建特征提取网络。Wang等[11]根据小目标交通标志的特点,提出特征图优化策略,提高了远程小目标交通标志的检测精度。SHEN[12]等提出了一种多尺度注意力模块,着重聚焦重要特征区域,抑制干扰信息,在检测小型交通标志方面具有显著优势。胡昭华等[13]将区域上下文信息模块和SA注意力机制引入检测模型,对交通标志小目标检测有一定的提升。胡均平等[14]在YOLOv5的基础上对SPP进行改进并优化梯度信息,同时在特征融合中嵌入自适应权重,使交通标志小目标深浅层的特征交互融合,提高了对交通标志小目标的特征提取能力。总体来说,上述深度学习检测方法均具有较好的表现,但小目标交通标志包含的信息量少,且分辨率较低,在实际交通场景中还存在诸多挑战。
因此,本文以YOLOv5检测网络为基础,做了如下改进:
1)将注意力机制ECA融入主干特征提取网络中,提高网络对交通标志小目标关键特征的关注度,降低复杂背景信息的影响。
2)将SPPF改进为SPPCSPC模块,以增强模型在不同尺度下对交通标志小目标的检测能力。
3)采用BiFPN加权双向特征金字塔网络进行跨层特征融合,使不同层级间特征图的信息充分融合,减少小目标特征信息丢失。
4)将原有的损失函数改进为Wise-IoU损失函数,聚焦锚框质量,提高小目标检测的整体性能。
1 YOLOv5s算法
YOLOv5s检测算法相较于其余几个版本其权重最小,检测速度最快、稳定性更好。结构主要包含Input、Backbone、Neck以及Head四个部分,整体网络架构如图1所示。
Input输入端主要通过自适应锚框计算、Mosaic数据增强等对输入任意大小的图像进行预处理,以丰富检测目标背景和增强网络推理能力。Backbone网络主要是将预处理后的图像输入到Focus结构以及CSP结构中进行关键特征信息提取,减少计算量的同时又提高了学习能力。Neck网络主要采用FPN+PAN相结合的架构,融合各阶层特征图的关键信息,生成不同尺寸的特征图,减少信息丢失,从而提高对主干网络输出特征的利用率。Head输出端主要根据Neck层输出的不同尺寸特征图以生成对应的预测边界框,进而提高对不同尺寸目标的检测性能。
2 改进YOLOv5算法
本文算法是在YOLOv5s算法的基础上加以改进,改进后的网络结构如图2所示。
2.1 轻量通道注意力机制模块(ECA)
由于复杂环境的影响,往往成像设备捕捉的图像质量较差,交通标志的关键特征信息与背景环境难以分割,且YOLOv5算法在卷积采样时容易忽略部分特征信息。同时,交通标志呈现多样化,不同类型的交通标志可能会促使算法在识别时出现切分异常,相似度较高的异类图像更是提升了算法在进行检测时的难度。因此,本文将ECA轻量通道注意力模块融合到骨干网络backbone中,以增强对交通标志小目标关键特征的关注度,抑制复杂背景信息的影响,从而提高获取位置信息的能力。ECA模块如图3所示。
其中,H表示特征图的高、W表示特征图的宽、C表示通道维度,σ表示Sigmoid函数,k表示卷积核大小,其公式如式(1)所示。
(1)
式中: 表示t最近的奇数;γ的取值为2;b的取值为1。
ECA模型的核心思想是先将特征层在GAP层进行全局平均池化,以获取未被降维的全局信息;随后利用一维卷积来获取通道之间的交互关系;最后采用sigmoid函数获取各特征点的权值,并与原始特征层相结合,以获得具有通道注意力的特征层。由此可见,ECA不仅简化了模型的复杂度还提高了计算效率。
2.2 空间金字塔池化CSP连接卷积(SPPCSPC)
YOLOv5采用了SPPF模块,其可以整合多尺度局部特征信息,使网络具有全局视角,便于获取丰富的多尺度特征表达。然而,SPPF只提取每个元素的最大值,而忽略其他元素,使特征图中一些有用信息的丢失。因此,为了获得多尺度特征的特征高级语义信息,增强网络特征融合能力,本文将YOLOv5的SPPF替换为SPPCSPC模块,以增强模型在不同尺度下的检测能力。SPPCSPC模块如图4所示。
相较于SPPF而言,SPPCSPC先通过CSP连接,以减少参数数量和计算成本,然后采用SPP技术进行最大池化操作,以获取小目标交通标志不同尺度的全局信息。这样既考虑了特征的全局信息,也充分利用了底层特征的信息,扩大了模型的感受野,能有效降低计算量,进一步提高检测精度。
2.3 加权双向特征金字塔网络(BiFPN)
YOLOv5在Neck网络层主要采用FPN+PAN相结合的架构,其中FPN网络(图5(a))是采用自上而下的方法来组合多尺度特征,可以有效提高精确度,但由于单向信息流的限制,这种结构存在一定局限性。而PAN结构(图5(b))则是在FPN的基础上增加了一个自下而上的路径聚合网络,以此来减少信息的丢失,实现双向的信息沟通,但其网络结构较为复杂,信息传输效率易受影响,难以实现远距离交通标志小目标的识别。
因此,本文将BiFPN(图5(c))添加至Neck网络中,以此对主干网络中不同阶段的特征信息进行双向融合,在增强特征表达能力的同时,进一步提升小目标交通标志检测性能。相较于PANet只有一条自上而下和自下而上的路径而言,BiFPN则把双向路径看作一个特征网络层,并多次重复堆叠同一层以实现更多高层特征融合。BiFPN计算公式如式(2)所示:
(2)
其中:O表示输出值,e表示极小值学习率,Wi表示可以学习的权重大小;Ii表示输入特征。
2.4 损失函数(WIoU loss)
YOLOv5的边界框损失函数采用了CIoU loss,其考虑到了重叠面积、欧式距离和纵横比等因素,并且较好地解决了训练过程中可能出现的梯度消失问题,但未能反映宽度和高度分别与其置信度的真实差异,因而收敛速度较慢且效率较低。WIoU[15]利用动态非单调聚焦机制将IoU替换为离群度进行锚框质量評估,并提出了一种梯度增益分配策略,极大地提高了性能。WIoU损失函数的公式如式(3)所示:
(3)
(4)
, (5)
其中*表示最小边界框的尺寸从计算图中分离;A和B表示地面实况和预测边界框的区域,IoU为预测框和真实框的交并比,β表示异常程度;超参数α和δ分别取1.9和3。
与CIoU相比,WIoU具有极强的泛化能力,能够捕捉交通标志小目标的局部信息,降低背景的过度干扰,其在训练过程中利用离群度动态调整锚框的梯度增益,有效防止了低质量锚框产生的有害梯度,在一定程度上能减少误检率。
3 实验及结果分析
3.1 实验环境及数据集
本实验的实验环境为:Intel(R) Core(TM) i5-1035G1 CPU @ 1.00 GHz 1.19 GHz,NVIDIA RTX 3060显卡,操作系统为Windows10-X64,开发环境为Python 3.8,PyTorch 1.11.0,CUDA 11.3。
本次实验进行性能训练及测试所采用的数据集是从TT100K和CCTSDB两数据集中筛选出含有3 833张小目标交通标志图像的组合数据集,该组合数据集涵盖了光照和天气条件的巨大变化,其中交通标志较小且较为密集,图像背景信息复杂,对交通标志检测具有很大挑战。本文将2 833张作为训练集、500张作为验证集、剩余500张作为测试集。实验采用Labelimg标注禁止(Prohibitory)、警告(Warning)和指示(indication)三个类别。
3.2 参数设置及评价指标
本实验采用预训练模型YOLOv5s.pt进行权重初始化,图片尺寸为640×640,批处理尺寸大小为16,迭代次数设置为100次,初始学习率设置为0.01。
本实验采用的评价指标主要有P(Precision,准确率)、R(Recall,召回率)、平均精度AP(Average Precision,平均精度)、mAP(Mean Average Precision,平均精度均值)。
, (6)
, (7)
式中:TP表示识别准确的检测框数量,FP表示识别错误的检测框数量,FN表示漏检框的数量,N表示输入图片的总量,N(classes)表示类别总数。
3.3 消融实验
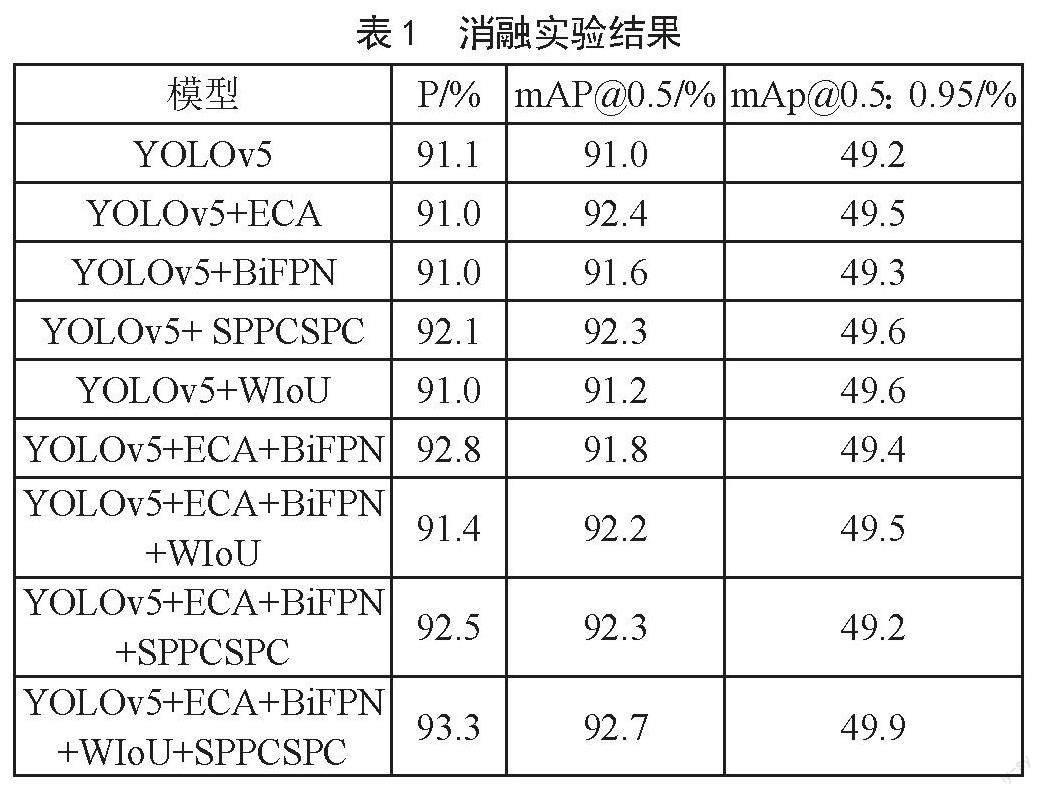
为评估各个改进模块对交通标志检测的优化效果,本文进行了单项及多项组合的消融实验,实验结果如表1所示。
由表可见,在YOLOv5s中引入ECA注意力机制能有效提取交通标志的关键特征,使得mAP@0.5提升了1.4%;在Neck网络中添加BiFPN后,mAP@0.5提升了0.5%;替换SPPCSPC后,P、mAP@0.5分别提升了1%、1.3%;使用WIoU损失函数mAP0.5:0.95提升了0.4%;在ECA和BiFPN的组合中,各项指标均有所提升,在此组合基础上引入WIoU优化边界框回归损失,使得P、mAP@0.5、mAP@0.5:0.95分别提升了1.3%、1.2%、0.3%。将四种改进策略组合得到最终算法,相较于原有算法,综合效果还不错,准确率达到了93.3%、mAP@0.5达到了92.7%,分别提升了2.2%、1.7%,且mAP@.5:.95也提升了0.7%。综上,通过引入ECA注意力机制、SPPCSPC模块、BiFPN结构以及WIoU loss,能有效提升模型总体检测精度,增强网络性能。
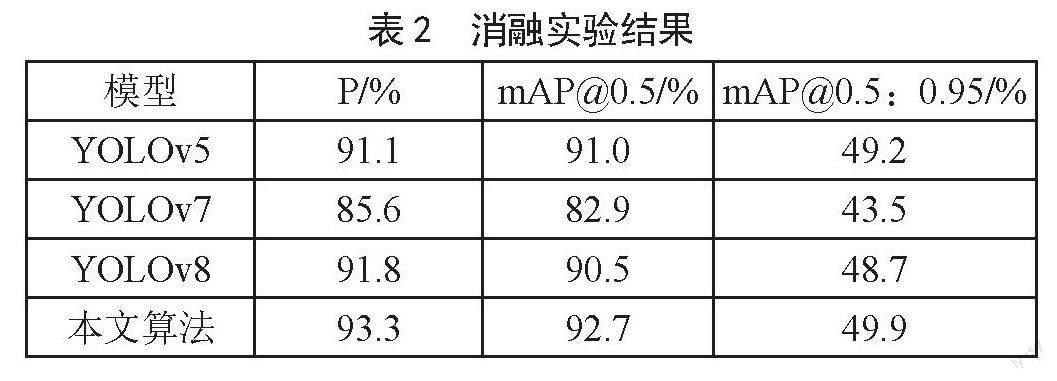
为进一步验证本文小目标交通标志检测的有效性,同YOLOv7、YOLOv8检测算法进行对比,改进后的YOLOv5网络模型在配置环境及参数一致的情况下,P值、mAP值均超过了其余算法,在检测小目标交通标志上具有显著优势。实验结果如表2所示。
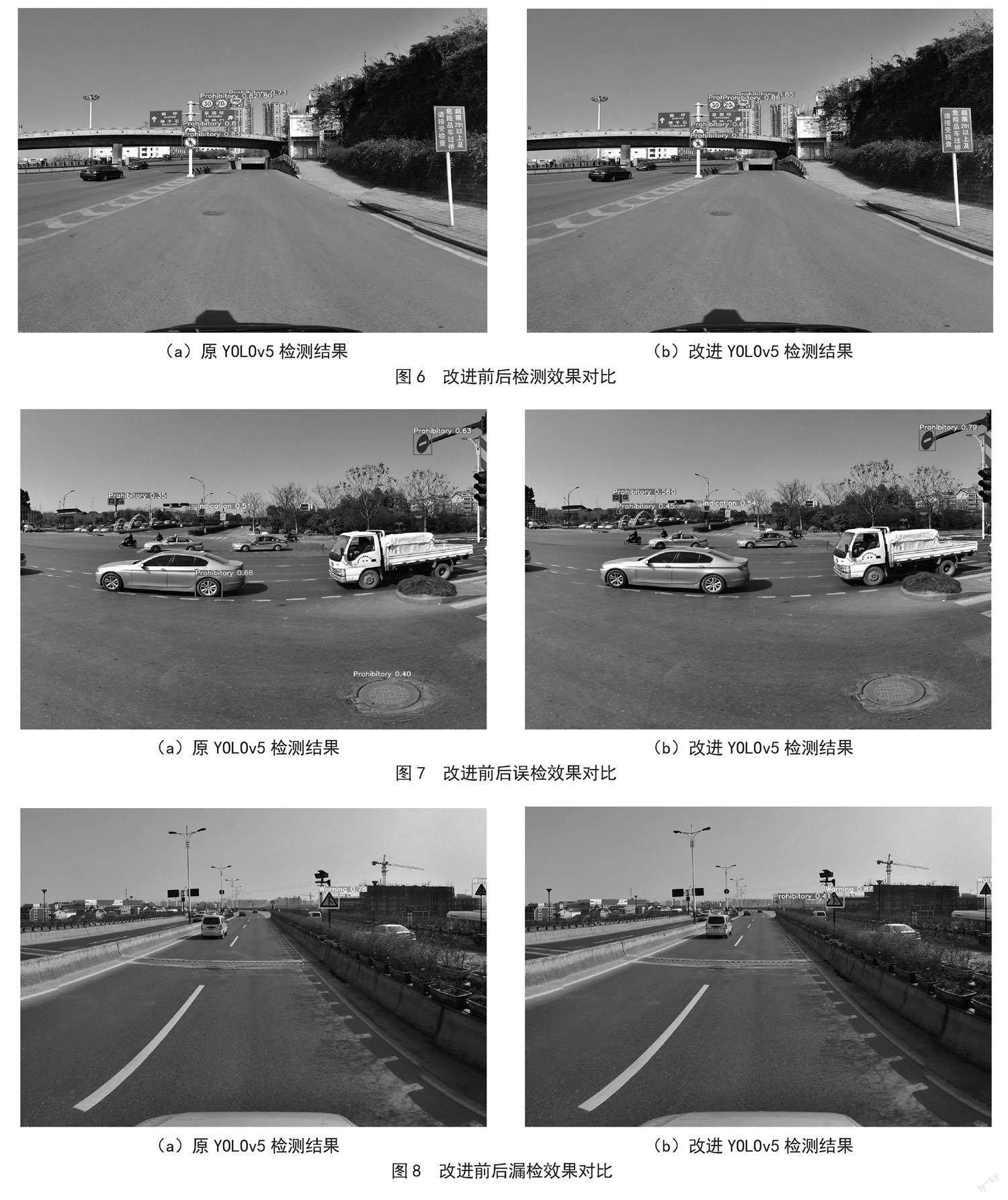
为了更形象地展示改进算法与原算法的交通标志小目标检测效果,检测结果如图6至图8所示。(a)为原始YOLOv5检测结果,(b)为改进YOLOv5检测结果。
从图6对比可知,对于较远距离的交通标志,原算法和改进后的算法均能正确检测出,但相比于原算法置信度更高;由图7可知,在相同视角下原算法存在误检现象,置信度也较低。对比图8可知,对于中远距离小型交通标志,原模型出现了漏检情况,而改进后的YOLOv5未漏检,且检测到的交通标志置信度均较高。综上,本文算法对小目标交通标志的检测具有更高的准确度,且在误检漏检方面均优于原YOLOv5算法。
4 结 论
本文提出了改进YOLOv5s的交通标志小目标检测模型。通过添加ECA注意力机制、SPPCSPC模块、修改BiFPN结构和改进WIoU损失函数来增强模型在不同尺度下交通标志小目标的检测能力。经过与其他模型对比实验,本文算法表现较为优异。在未来研究工作中,将利用多方面数据融合实现信息互补,通过多模态交通标志检测提升小目标交通标志的检测效率和精度;构建更轻量化的交通标志识别模型,降低复杂度,提高运算速度;结合行车速度、行车视距等探索在不同交通场景下交通标志的检测与识别。
参考文献:
[1] 张卡,盛业华,叶春.针对车载移动测量系统的交通标志自动检测 [J].武汉大学学报:信息科学版,2009,34(12):1448-1453.
[2] 郝博闻,梁宇峰,李文强,等.基于颜色空间和模板匹配的交通标志检测方法 [J].智能计算机与应用,2016,6(4):20-22+27.
[3] YAKIMOV P. Traffic signs detection using tracking with prediction [C]//International Conference on E-Business and Telecommunications.Cham:Springer,2015:454-467.
[4] 苗丹,盧伟,高娇娇,等.基于聚类与Hough变换的交通标志检测方法[J].计算机系统应用,2019,28(11):213-217.
[5] 于平平,齐林,马苗立,等.基于视觉注意机制和形状特征的交通标志检测方法[J].数学的实践与认识,2019,49(21):123-131.
[6] GIRSHICK R,DONAHUE J,DARRELL T,et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]//CVPR '14:Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition.Columbus:IEEE,2014:580-587.
[7] HE K,ZHANG X,REN S,et al. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition [J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2014,37(9):1904-1916.
[8] LIU W,ANGUELOV D,ERHAN D,et al. SSD:Single Shot MultiBox Detector [C]//Computer Vision – ECCV 2016.Amsterdam:Springer,2016:21-37.
[9] CHENG L,LI J,DUAN P,et al. A small attentional YOLO model for landslide detection from satellite remote sensing images [J].Landslides,2021,18(8):2751-2765.
[10] YANG J S,YANG Y N,LI T J. Traffic sign recognition algorithm based on depthwise separable convolutions [J].Chinese Journal of Liquid Crystals and Displays,2019,34(12):1191-1201.
[11] WANG L,ZHOU K,CHU A,et al. An Improved Light-Weight Traffic Sign Recognition Algorithm Based on YOLOv4-Tiny [J].IEEE Access,2021,9:124963-124971.
[12] SHEN L,YOU L,PENG B,et al. Group multi-scale attention pyramid network for traffic sign detection [J].Neurocomputing,2021,452:1-14.
[13] 胡昭華,王莹.改进YOLOv5的交通标志检测算法 [J].计算机工程与应用,2023,59(1):82-91.
[14] 胡均平,王鸿树,戴小标,等.改进YOLOv5的小目标交通标志实时检测算法 [J].计算机工程与应用,2023,59(2):185-193.
[15] TONG Z,CHEN Y,XU Z,et al. Wise-IoU:Bounding Box Regression Loss with Dynamic Focusing Mechanism [EB/OL].(2023-01-24).https://arxiv.org/abs/2301.10051.
作者简介:刘振渤(1998—),男,汉族,四川达州人,硕士研究生在读,研究方向:交通信息工程及控制;通讯作者:李慧(1976—),男,汉族,四川成都人,副教授,硕士研究生,研究方向:道路交通安全。
