驾驶特性对驾驶人应激反应的影响研究
2024-04-11梁钰杨艳群祝站东陈铭林君君郑新夷
梁钰 杨艳群 祝站东 陈铭 林君君 郑新夷


摘要:【目的】驾驶人在行驶中受交通应激事件的影响,为探索应激反应的程度展开研究。【方法】采用维也纳交通心理测试系统(VTS)甄选出高驾驶特性组(H 组)和低驾驶特性组(L 组)各21名被试进行试验,通过统计学方法分析不同驾驶特性群体的应激反应特征,并采用集对分析模型评价被试的应激反应优劣。【结果】研究结果表明:通过检测驾驶人的驾驶特性能力区分其应激反应能力可行,提高驾驶特性能够帮助驾驶人提高应激能力,情况越危急,提高的幅度越大。【结论】试验中,在所有应激距离下,H组的应激反应均优于L组,且应激距离的减少对L组的影响比H组大;在交通应激事件中为驾驶人提供1 s以上交通冲突时间是必要的。
关键词:交通运输;驾驶特性;应激反应;集对分析;驾驶模拟
中图分类号:U491.2 文献标志码:A
本文引用格式:梁钰,杨艳群,祝站东,等. 驾驶特性对驾驶人应激反应的影响研究[J]. 华东交通大学学报,2024,41(1):87-95.
Study on the Influence of Driver Characteristics on
Driver′s Stress Response
Liang Yu1, Yang Yanqun2,3, Zhu Zhandong1, Chen Ming2,3, Lin Junjun2,3, Zheng Xinyi3,4
(1. School of Transportation, Fujian University of Technology, Fuzhou 350118, China; 2. College of Civil Engineering, Fuzhou University, Fuzhou 350108, China; 3. Joint International Research Laboratory on Traffic Psychology & Behaviors, Fuzhou
University, Fuzhou 350108, China; 4. College of Arts and Human Science, Fuzhou University, Fuzhou 350108, China)
Abstract: Drivers are affected by traffic stress events during driving, in order to explore whether driver characteristics affect drivers stress response. 21 subjects from high driving characteristics group (Group H) and low driving characteristics group (Group L) were selected by the Wiener Traffic Psychometric test system (VTS) to analyze the stress response characteristics of different driving groups through statistical methods, and the set pair analysis model was used to evaluate the stress response of the subjects. The specific performance is as follows: it is feasible to distinguish drivers stress response ability by detecting driver characteristics. Improving driving characteristics can help drivers enhance their stress ability. The more critical the situation is, the greater the improvement is. In all stress distance experimets, stress response of Group H is better than that of Group L and the reduction of stress distance had a greater impact on Group L than on Group H. The results prove that it is necessary to provide drivers with more than 1s TTC (time to collision) in traffic stress events.
Key words: transportation; driver characteristics; stress response; set pair analysis; driving simulation experiment
Citation format:LIANG Y, YANG Y Q, ZHU Z D, et al. Study on the influence of driver characteristics on driver′s stress response[J]. Journal of East China Jiaotong University, 2024, 41(1): 87-95.
【研究意義】由于交通环境的复杂性,驾驶人在行驶中无法及时避开交通应激事件(例如从路旁突然冲出的行人、从视距不良的交叉口突然冲出的车辆等),采取了错误操作而导致事故发生。剖析事故机理时发现,驾驶人特性导致的应激反应能力的差异是影响事故发生的重要因素。
【研究进展】在针对不同驾驶特性的驾驶人开展的应激反应能力研究方面,国内外针对驾驶特性研究的角度和表征内容存在差异。赵亮等[1]对应激反应的研究致力于发现表征应激能力的指标,认为复杂道路环境下驾驶人的应激训练次数和瞳孔面积变化率函数模型能较好地描述驾驶人在复杂道路环境中的应激反应能力。Takahashi等[2]通过测量老年司机的手掌出汗反应、皮肤电位反射以及操作方向盘、油门和刹车的能力,评估驾驶人对危险的感知能力。李显生等[3] 研究表明不同冲突导致的应激场景下驾驶人的心率增长率有显著差异性。杨静思等[4]主要探讨了驾驶人性别对驾驶行为特性的影响。吴付威[5]运用复杂反应测试系统开展研究,发现事故组驾驶人对复杂信息的判断以及执行功能弱于非事故组驾驶人。郭烈等[6]主要通过驾驶人状态、意图和风格等方面进行驾驶特性的识别。【关键问题】但是,这些应激反应研究往往通过单一特性的指标来表征驾驶人的应激反应,缺乏综合驾驶人的生理、心理、驾驶操作等多方面特性全面评估驾驶人的应激反应研究。
【创新特色】为探究不同生理素质和心理能力的驾驶人的应激反应,本文根据认知心理学中人类行为的S-O-R模式将驾驶行为分为3个阶段:信息感知阶段、判断决策阶段和驾驶操作阶段。并相应地将驾驶特性分为感知特性、判断特性和操作特性。利用VTS对驾驶特性进行测试,筛选出高驾驶特性组和低驾驶特性组,采用驾驶模拟实验采集不同驾驶特性水平的驾驶人在不同紧急程度的道路场景下的应激反应数据,建立评价驾驶人应激反应优劣(安全程度)的数学分析方法。
1 研究方法与实验
1.1 被试对象介绍
实验招募100名持照驾驶人进行VTS测试,拥有一年及以上驾驶经验的被试占比64%,年龄在20~26岁之间,其中男性70名、女性30名。被试的驾驶经验占比分布为:6个月以内(58%),6个月~1a(6%),1~3a(20%),3~5a(6%),5a以上(10%)。
实验基于预期方差、目标置信度和误差幅度计算所需样本量,计算公式为
式中:N为样本量;Z为标准正态分布统计量;σ为标准偏差;E为最大误差。参考文献[7],当置信水平为90%时,Z=1.25,σ取值范围为0.25~0.5,为检测出可靠的效应量,取σ为0.5,E=10%,算得最小样本量为40。为充分确保样本有效性,从参与VTS实验的被试中选择42人进行驾驶模拟实验。
1.2 VTS测试
目前已有多项研究[8]采用VTS进行驾驶人特性的测量,具有一定的可靠性。根据驾驶人的感知特性、判断特性及操作特性,本文选用逻辑推理能力、交通感知能力、集中力、反应速度、运动速度及反应性压力耐受能力共6个指标来表征驾驶员驾驶特性。利用VTS的5个测试模块对驾驶员的驾驶特性表征指标进行测评,具体如表1所示。
PR(percentile rank)值是VTS测试结果的衡量值[9],代表在测试项目所考察的能力上,对照组中取得同样分数或更低分数的人所占的比例,实验所用VTS对照组是欧洲被试群体的一个代表性样本。5个测试模块的PR值总和即驾驶人的驾驶特性得分,得分越高表明驾驶人拥有越好的驾驶特性能力。实验最终剔除了2个PR值异常低(低于3)的男性被试数据,在剩余98个被试中,挑选驾驶特性得分最高的21个被试(男性18人,女性3人)代表高驾驶特性组(H组),挑选驾驶特性得分最低的21个被试(男性14人,女性7人)代表低驾驶特性组(L组),两组被试进行驾驶模拟实验。
对2组被试的驾驶特性指标进行独立样本t检验,莱文方差等同性检验表明,所有指标检验不能否认方差相等,6个指标的检验结果均显著(表2),表明挑选出的两组被试的驾驶特性存在显著差异。表2中:*表示P<0.1(边缘显著),**表示P<0.05(顯著),***表示P<0.01(极显著)。
1.3 驾驶模拟实验设计
1.3.1 实验场景设计
驾驶人的内在因素如驾驶特性,外在因素如行驶速度、与应激源的距离(应激距离),对驾驶人的应激反应均有影响。实验设计的应激事件是停在路边的车辆(应激源)突然从遮挡区域出现在自车前方,应激源车辆在被试所在车道低速行驶一段距离后换道至另一个车道停车。王畅等[9]研究表明,与行驶速度相比,应激距离的变化对驾驶人的心率增长率、心率变异性LF值的影响更大。因此,实验的变量设置为应激距离。车辆理论安全间距包括基本安全距离、感知反应距离和制动距离,3个过程所需时间之和通常取1.5 s[9]。应激距离的确定考虑自车车身前部长度的影响,控制行驶速度为60 km/h,对应1.0、1.5 s和2.0 s的交通冲突时间(time to collision, TTC)的侵入距离分别为19.2、27.5 m和35.8 m[10],将此设置为实验场景的3个应激距离。
为使驾驶人对即将发生的应激事件没有心理预期,场景中一共设计6处可能产生应激事件的位置,但只有第2、5、6处真正触发应激事件。此外,为克服驾驶人在3次应激事件中产生的学习效应,设计3种场景拥有不同的触发距离组合:场景A(19.2、27.5、35.8 m),场景B(27.5、35.8、19.2 m),场景C(35.8、19.2、27.5 m)。3种场景在实验中将被轮流使用。
1.3.2 应激反应表征指标
根据对驾驶员应激反应行为的分析,甄选出驾驶员应激反应行为的表征指标分别为脑电行为指标、视觉行为指标和驾驶行为指标。结合相关文献[11],确定各类指标内容如表3。
1.3.3 实验设备
采用DSR-1000TS2.0型驾驶模拟系统进行室内驾驶模拟闭环实验,该系统可以记录并导出多项驾驶行为参数,如方向盘的转角、刹车深度、油门深度等,以及多项车辆参数,如车辆的速度、加速度、轨迹偏移量等。
采用32通道NE无线脑电仪,传输24 bit脑电数据,能准确还原被试脑电信号,其带宽为0~250 Hz,采样率为500 SPS,分辨率为24 bit~0.05 uv,噪声小于1 uvrms(0~250 Hz)。
采用Dikablis开发的眼动仪,结合分析软件D-Lab一起用于跟踪和测量参与者视觉行为的特征。采集样本时,眼动仪的频率设置为60 Hz,精度范围为0.1°~0.3°。
1.3.4 实验流程
在正式实验开始前,告知被试实验目的和任务,强调在正式实验时按照60 km/h速度行驶,被试阅读并签署同意书。主试给被试佩戴脑电仪和眼动仪。被试在非实验场景下驾驶5~10 min,以便熟悉驾驶模拟器操作。正式实验开始,主试在控制台加载实验场景(A、B、C场景中的一个),驾驶时长约10 min,每个被试仅在一种场景中驾驶。
1.4 实验数据处理
VTS数据(PR值)由系统直接导出,眼动数据通过D-Lab软件导出,操纵数据在驾驶模拟系统自动生成,采集频率为30 ms,脑电数据通过NIC软件生成,采集各个通道数据后导出到MATLAB使用EEG-Lab工具包处理,其中,过滤保留0.5~40 Hz(500 Hz采样频率)之间的数据,用平均值作为重参考,运行ICA进行独立主成分分析,去除伪迹。
2 实验数据处理
对应激反应各个指标进行双因素重复测量方差分析(3组应激距离为重复测量的因子),结果见表4,进行事后检验的结果如图2。在方差分析前,采用Mauchly's球形假设检验变量差值的方差是否相等,仅“瞳孔面积”通过检验,因此其他指标P值采用Greenhouse-Geisser矫正。
重复测量方差分析结果表明,组内效应(应激距离)造成所有指标的差异均显著(P<0.01),组间效应(驾驶特性)对所有指标造成的差异均显著(P<0.01),应激距离和驾驶特性的交互效应造成刹车速度的差异显著。从指标的变异解释率来看,根据Ferguson总结的社会科学领域的小、中、大3种参数水平对应的效应量临界参考值为0.04,0.25,0.64[12]。由表4知,在不同应激距离下,油门深度、刹车速度、方向盘转角、瞳孔面积的指标变异解释率均大于0.64,(θ+α)/β、扫视频率的指标变异解释率介于0.25~0.64,说明6个指标具备重要现实意义;在不同驾驶特性分组中,瞳孔面积、油门深度、刹车速度、(θ+α)/β的指标变异解释率介于0.25~0.64之间,方向盘转角、扫视频率的指标变异解释率介于0.04~0.25之间,说明6个指标具备不同程度的现实意义。
根据表4和图1,总的来说,H组被试的所有指标表现均优于L组被试。应激距离越长时,被试的生理、心理状况和驾驶行为也更加安全穩定。对脑电指标、眼动指标、驾驶行为指标的分析如下。
1)脑电指标。应激距离越小(θ+α)/β值越大,表明在越小的应激距离下,被试的警觉程度越高。由图1(a)和表4可知,L组的(θ+α)/β平均值高于H组,表明L组在应激过程中警觉程度更高。
2)眼动指标。眼动指标包括扫描频率和瞳孔面积,应激距离越小扫视频率(瞳孔面积)越大,表明在越小的应激距离下,被试的心理压力越大;由图1(e)和表4可知,L组扫视频率大于H组,表明L组的心理压力更大;由图1(f)和表4可知,L组瞳孔面积大于H组,表明L组的心理压力更大。
3)驾驶行为指标。应激距离越小刹车速度越大,表明驾驶人在较小的应激距离下刹车更紧急。由图1(b)和表4可知,H组油门深度大于L组,应激距离越大油门深度越大,表明驾驶人的驾驶特性越优或被试在面对更长的反应空间(时间)时,对油门深度的掌控力就越强,也倾向于以更高的速度行驶;由图1(c)和表4可知,L组刹车速度大于H 组,表明L 组的刹车更加紧急。驾驶特性和应激距离对刹车速度的影响的交互作用显著,表明驾驶特性和应激距离共同作用于刹车速度,不能分割看待;由图1(d)和表4可知,对于方向盘转角,L组被试大于H组被试,表明L组被试的应激反应更激烈。应激距离越小方向盘转角越大,表明在越小的应激距离下,被试的反应越激烈。
驾驶特性和应激距离对刹车速度的交互作用显著,进行简单效应分析,结果如表5。固定驾驶特性,不同应激距离对刹车速度的影响:驾驶特性处于不同水平时,应激距离对刹车速度值都有统计学意义(P<0.001)。其中驾驶特性高时,应激距离对刹车速度影响更大(F=32.49)。固定应激距离,不同驾驶特性对刹车速度的影响:应激距离处于不同水平时,驾驶特性对刹车速度都有统计学意义(P<0.001,P=0.002)。其中应激距离为19.2 m时,驾驶特性对刹车速度的影响最大(F=16.45)。
3 基于集对分析的应激反应评价
为全面综合地表示高、低驾驶特性被试在不同应激距离下的应激反应,本文引入集对分析模型评价被试的应激反应。在实验中选出的6个指标的基础上,通过K-means聚类确定评价等级取值范围,采用熵权法确定指标权重。集对分析法(set pair analysis, SPA)的思想是把被研究的客观事物之间的确定性联系与不确定性联系作为一个确定不确定系统来分析处理。SPA已被广泛应用于计算机科学、生物化学、交通运输、工程技术、地球与环境科学等多个学科领域[13-14]。
3.1 K-means聚类确定评价等级取值范围
在进行集对评价前需要确定评价等级的取值范围。K-means算法的作用是将相似的样本自动归到一个类别中。本文根据K-means聚类算法取得各指标5个类别的中心值,根据该值的大小结合指标表征应激水平的规律,得到评价等级取值范围如表6所示。等级1表示评价等级最高,等级5最低。
3.2 熵权法确定评价指标权重
熵权法是综合性的客观定权法,根据各个指标蕴含的信息量大小来确定权重。熵权法确定评价指标权重的步骤有:指标归一化、计算特征比重、计算信息熵、得出熵权。熵权法计算得(θ+α)/β、扫视频率、瞳孔面积、油门深度、刹车速度、方向盘转角的权重分别为:0.166 57、0.168 67、0.166 82、0.170 87、0.165 11、0.161 96。
3.3 集对分析评价模型
集对分析法进行评价的原理是令2个相互联系的集合形成集对(A, B),若两个集对处于同一评价等级中,则表示具有同一性;若所属评价等级间存在间隔,则表示具有对立性;如果处于相邻的评价等级,则表示具有差异性。假设评价对象指标值集合[A=[x1,x2,…,x6]],评价指标5等级标准集合[B=[s0~][s1,…,sk-1~sk,…,s4~s5]],建立集对的联系度如下
式中:[μ]为集对的联系度;a为同一度;b1为优异度;b2为劣异度;c1为优反度;c2为劣反度;[a+][b1+b2+c1+c2=1];[i+∈[0,1]];[i-∈[-1,0]];[j+=0,1];[j-=-1]。
运用贴进度计算联系度,越小越优型指标的具体表达式如式(3)。对于越大越优型指标,如油门深度,计算联系度时只需将式(3)定义域两端反向即可。
式中:[μj(k)]为待评样本的第j项指标的第k级联系度向量,k=1,2,3,4,5;[[sj(k-1),sj(k)]]为第j项指标的第k级评价标准的范围。
根据评价指标各等级的联系度,结合指标权重,计算样本的综合联系度向量[μ]如下
集对分析将同一度与对立度的比值定义为所论集对的集对势[SHI(μ)],在此基础上延伸出了广义集对势[SHI(μ)G],如下
集对分析一般根据最大集对势准则确定等级,如下
最终算得两组被试在3种应激距离下的集对势如表7,采用最大集对势准则判定所得的评价等级如表中蓝色标注。根据评价结果可知,无论在哪种应激距离下,高驾驶特性被试的应激反应能力均高于低驾驶特性被试,表明通过驾驶特性判断驾驶人应激反应能力在一定程度上可行。高驾驶特性被试在应激距离从27.5 m减少到19.2 m时,评价等级由二级变为三级,而低驾驶特性被试则由三级变为五级,表明应激距离的减少对低驾驶特性被试的影响更大。在应激距离从35.8 m减少到27.5 m时,高驾驶特性被试评价等级由一级变为二级,低驾驶特性被试等级由二级变为三级,两者等级变化幅度相同,结合行人突然侵入道路作为应激源的一项研究的结论:驾驶人在35.8 m(TTC=2 s)和27.5 m(TTC=1.5 s)的应激距离下的心理负荷不存在显著差异,而在27.5 m和19.2 m(TTC=1 s)的應激距离下的心理负荷存在显著性差异,说明驾驶人是否有1 s以上TTC对其应激反应非常重要。
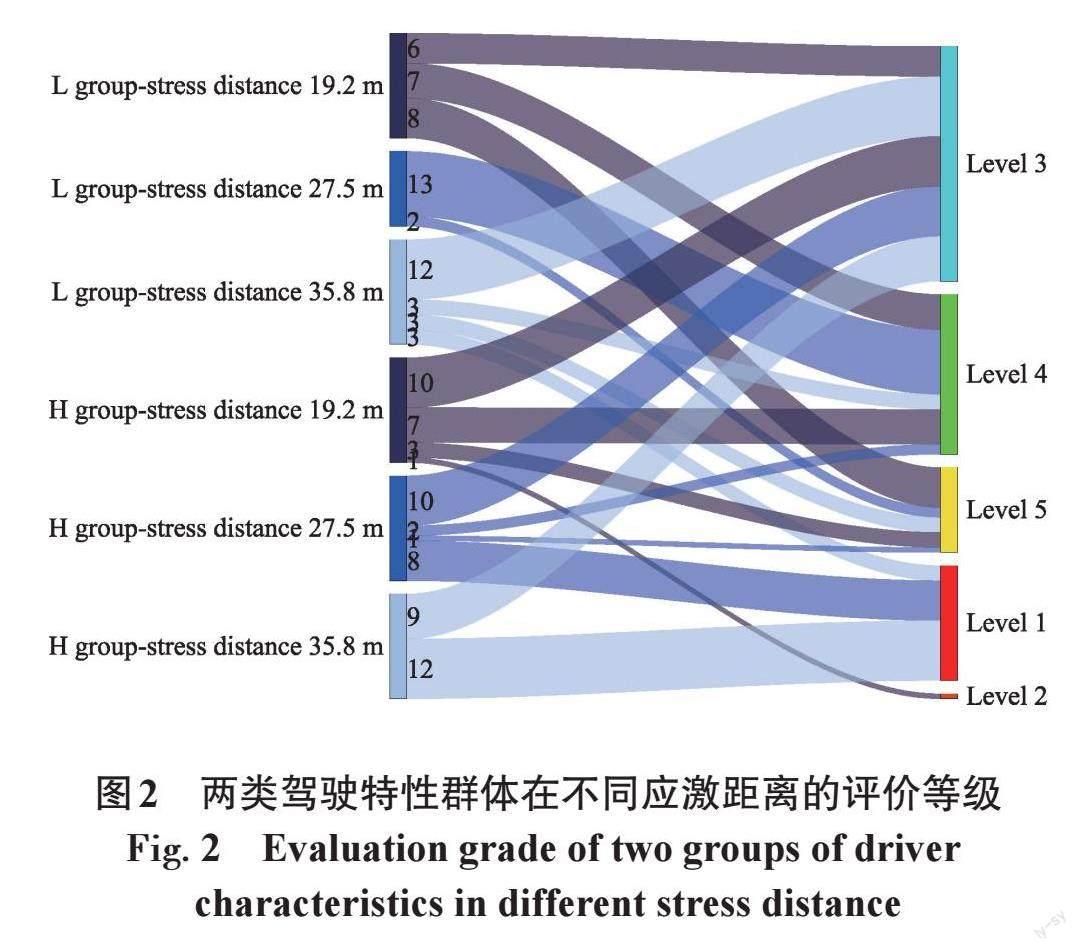
为探究样本个体的应激反应情况,我们通过MATLAB计算2组被试在3种应激距离下,共计216个样本的集对评价等级,结果如图2所示。以应激距离为19.2 m的21个低驾驶特性被试为例:6人的应激反应被评为等级三,7人评为等级四,8人评为等级五,应激距离为19.2 m的低驾驶特性被试评为等级五的人数占据等级五的8/17。
因此,被评价为等级三的样本数最多,除了低驾驶特性被试在27.5 m应激距离这类样本,其余5类均有样本评为等级三,表明大多应激反应处于中间水平。等级一大多来自高驾驶特性在距离27.5 m和35.8 m的样本中,表明应激反应最好的是这两种情况;等级一还有少部分来自低驾驶特性在距离35.8 m的样本中,表明小部分低驾驶特性被试在应激距离足够时反应优秀。然而绝大多数低驾驶特性被试在35.8 m时被评为等级三,评为等级一的数量与等级四、等级五相同,说明即使在应激距离较长时,低驾驶特性被试内部参差大,应激反应有极好的也有极差的。反观高驾驶特性被试,在应激距离为27.5 m和35.8 m时,评价等级稳定在等级一和等级三。高驾驶特性被试只有在应激距离为19.2 m时表现不稳定,但大多被试评价为等级三、等级四,少数为等级五、等级二。高驾驶特性被试和低驾驶特性被试的共同点在于,应激距离为19.2 m时,他们的评价等级分布在等级三、四、五,说明在交通冲突时间(TTC)为1 s时,被试的应激反应不良,容易出现危险情况。
4 结论
1)集对评价结果显示,高驾驶特性被试的评价比低驾驶特性被试的评价在应激距离为19.2 m时高两个等级,而在应激距离为27.5 m和35.8 m时只高一个等级,表明提高驾驶特性能够帮助驾驶人提高应激能力,情况越危急,提高的幅度越大。
2)通过VTS确定的驾驶特性揭示了驾驶特性和应激反应的关系,即在所有应激距离下,H组的应激反应均优于L组,且应激距离的减少对L组的影响比H组大。
3)在应激距离为35.8 m和27.5 m时,两组被试的评价等级相差一级,但应激距离为19.2 m时,两组被试的评价等级相差两级,表明在交通应激事件中,1 s以上的交通冲突时间(TTC)是预知驾驶人应激反应安全程度的一个临界点。
参考文献
[1] 赵亮, 刘浩学, 石保同. 复杂道路环境中驾驶人应激反应能力研究[J]. 中国安全科学学报, 2015, 25(4): 105-109.
ZHAO L, LIU H X, SHI B T. Stress response ability of drivers in complex road environment[J]. China Safety Science Journal, 2015, 25(4): 105-109.
[2] TAKAHASHI R, KOBAYASHI M, SASAKIT, et al. Driving simulation test for evaluating hazard perception: Elderly driver response characteristics[J]. Transportation Research Part F: Traffic Psychology and Behaviour, Elsevier Ltd, 2017, 49: 257-270.
[3] 李显生, 孟凡淞, 郑雪莲, 等. 基于心率变异性的应激场景下驾驶人心理特性分析[J]. 上海交通大学学报, 2018(2): 163-168.
LI X S, MENG F S, ZHENG X L, et al. Psychological characteristics of drivers in the stress scene based on heart rate variability[J]. Journal of Shanghai Jiaotong University, 2018(2): 163-168.
[4] 杨静思, 闫学东, 段克, 等. 基于驾驶模拟器的性别对信控铁路道口抵近行为的影响研究[J]. 中国公路学报,2020, 33(6): 54-64.
YANG J S, YAN X D, DUAN K, et al. Effect of gender on approach behavior at flashing light grade crossings base on driving simulator[J]. China Journal of Highway and Transport, 2020, 33(6): 54-64.
[5] 吴付威. 基于信息处理机制的驾驶人感知-判断-反应特性研究[D]. 西安: 长安大学, 2020.
WU F W. Research on drivers' perception-judgement-response characteristics based on information processing mechanism[D]. Xi'an: Chang'an University, 2020.
[6] 郭烈, 马跃, 岳明, 等. 驾驶特性的识别评估及其在智能汽车上的应用综述[J]. 交通运输工程学报, 2021, 21(2):7-20.
GUO L, MA Y, YUE M, et al. Overview of recognition and evaluation of driving characteristics and their applications in intelligent vehicles[J]. Journal of Traffic and Transportation Engineering, 2021, 21(2): 7-20.
[7] 王珺, 宋琼雅, 许岳培, 等. 效应量置信区间的原理及其实现[J]. 心理技术与应用, 2019, 7(5): 284-296.
WANG J, SONG Q Y, XU Y P, et al. Calculating confidence intervals of Cohen's d and Eta-squared: A practical primer[J]. Psychological Technology and Applications, 2019, 7(5):284-296.
[8] DENG M, WU F, GU X, et al. A comparison of visual ability and its importance awareness between novice and experienced drivers[J]. International Journal of Industrial Ergonomics, 2021, 83(4): 103-141.
[9] 王畅, 鲁玉萍, 付锐, 等. 行人突然侵入道路时驾驶人的生理负荷特性研究[J]. 科学技术与工程, 2016, 16(21): 106-111.
WANG C, LU Y P, FU R, et al. Parameters analysis of physiology load of drivers during stress response[J]. Science Technology and Engineering, 2016, 16(21): 106-111.
[10] 任福田, 刘小明, 荣建. 交通工程学[M]. 北京: 人民交通出版社, 2008.
REN F T, LIU X M, RONG J. Traffic engineering[M]. Beijing: China Communications Press, 2008.
[11] YANG Y, CHEN J, EASA S M, et al. Driving simulator study of the comparative effectiveness of monolingual and bilingual guide signs on Chinese highways[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2020, 68: 67-78.
[12] FERGUSON C J. An effect size primer: A guide for clinicians and researchers[J]. Professional Psychology Research and Practice, 2009, 40(5): 532-538.
[13] SABATER S, PASTOR M R, ANDRES I, et al. MRI prostate contouring is not impaired by the use of a radiotherapy image acquisition set-up: An intra- and inter-observer paired comparative analysis with diagnostic set-up images[J]. Cancer/Radiotherapie, 2021, 25(2): 107-113.
[14] GE W, LI Z, LI W, et al. Risk evaluation of dam-break environmental impacts based on the set pair analysis and cloud model[J]. Natural Hazards, 2020, 104(2): 1641-1653.
第一作者:梁鈺(1988—),女,实验师,硕士,研究方向为交通安全、交通心理学。E-mail:920126627@qq.com。
通信作者:杨艳群(1969—),男,教授,硕士,硕士生导师,研究方向为交通安全、交通心理学。E-mail:yangyanqun@fzu.edu.cn。