非合作多基地雷达系统性能仿真分析
2024-04-02司梦祥杨风暴
司梦祥,杨风暴,宋 杰
(1.中北大学,山西太原 030051;2.海军航空大学,山东烟台 264001)
0 引 言
随着科技的不断发展,无源雷达凭借其良好的性能逐渐成为新兴探测技术领域的研究重点。无源雷达的快速发展离不开国内外的专家学者近一个世纪的研究贡献。1922年,美国的Taylor等人在实验中第一次通过电磁信号成功探测到了正在江中行驶的木制船舶,所用的探测设备正是类似于双基地连续波雷达的装置[1]。之后很长一段时间,随着雷达收发开关的发明,单基地雷达的研究热度不断上升,研究者对双基地雷达的关注度下降了很多。在20 世纪末期,美国的Lockheed Martin 公司用了10 多年时间研制的“沉默哨兵”新型的雷达检测系统[2],真正实现了无源雷达的商业化。直到80 年代以来,我国才开始研究无源雷达相关技术。目前,国内对无源雷达探测系统研究的机构[3]主要是一些理工类高等院校和专业研究所。其中,武汉大学,西安电子科技大学,北京理工大学,哈尔滨工业大学,北京邮电大学,中科院电子所,中国电科14、36、38研究所,海军航空大学等都在无源雷达的研究工作中,积累了大量有价值的理论和实验结果。目前,这些研究主要集中在利用多种辐射源,如广播信号、电视信号、卫星信号和手机基站信号的无源双基地雷达系统,完成相应的理论研究和实际系统的构建,但是利用无源雷达自身仅有接收模块的优势来提高系统检测性能的相关理论研究还是比较缺乏且关键技术尚未突破。因此,无源雷达探测技术还需要继续深入研究,探测精度和探测能力均需进一步提高[4-6]。
目前对双基地雷达和多基地雷达的研究大致可以分为3 个方面:1)目标探测和参数提取;2)多基地雷达系统配置;3)目标跟踪和精度。张小宽等提出可以在不同基线距离下得到双基地雷达对隐身目标的探测范围[7];战立晓等研究了变基线地空双基地雷达的动态检测性能[8];吴小坡等对T-R型双基地雷达的探测范围指标进行了研究,通过仿真,绘制出不同基线距离下的双基地雷达对隐身目标的探测范围[9];王芳等提出了一种复合双基地雷达系统,该系统由两个独立配置的宽波束单基地雷达配对构成[10];这些文献只考虑了系统的基线距离对探测范围的影响,没有考虑到发射机的数量也可以提高雷达系统的探测范围和探测覆盖率。
基于以上文献的启发,本文提出了非合作多基地雷达系统模型对海上目标进行探测,首先对舰船目标进行三维建模,通过电磁仿真软件仿真计算出海上目标的双基地RCS 数据,将得到的RCS数据导入到检测覆盖率模型,通过改变系统中发射机的数量和基线距离,通过普通货船和隐身舰船的对比实验,验证了非合作多基地雷达系统可以有效地探测到隐身舰船,得到最优的雷达系统配置和几何结构。
1 双基地雷达系统理论
双基地雷达是一种发射机和接收机分别位于不同位置的雷达系统。多基地雷达系统利用多个发射机和一个接收机,融合来自所有发射机的目标信息。无源双基地或多基地雷达利用机会雷达来探测和定位传输源和目标。双基地雷达工作原理的几何关系如图1所示。

图1 双基地雷达几何关系图
1.1 双基地雷达截面积
目标的双基地雷达截面积取决于入射方向和接收方向之间形成的角,称为双基地角β。与单基地雷达截面积不同,双基地雷达截面积是测量在入射方向上重新辐射回的电磁能量的量,双基地雷达截面积是在接收机方向上返回的电磁能量的量。在单基地雷达截面积中只有一组360°值,对于双基地雷达截面积而言,对应于每个目标的360°方位角,每个入射方向都有自己的360°雷达截面积值。因此,要完全绘制出一个海上目标的双基地雷达截面积,每个目标都要有自己的360组RCS数据[11-12]。
RCS的定义可以为
式中,R2为目标到接收机的距离,Es为散射方向距离目标R处探测到的目标散射电场强度,Ei为入射方向入射到目标处的电场强度。
对于简单的几何形状,RCS 可以很容易地计算:
式中:Aea为目标在入射方向上的截面积,单位为m2;λ为波长,单位为m。在复杂目标形状的情况下,雷达截面积必须要考虑到目标的“电尺寸”,这是由目标在入射波长方面的最大相对尺寸定义的。目标的雷达截面积可发生显著变化的频率区有3 个,分别是瑞利区(低频)、谐振区(共振)和光学区(高频)。这3 个区域是根据“电尺寸”的大小分类的。
1.2 双基地雷达方程
双基地雷达距离方程给出了接收功率与系统参数、目标散射特性和交互几何形状的函数关系。解雷达方程得到距离乘积[8]。
式中,RT为发射机到目标的距离;RR为目标到接收机的距离;PT为发射机脉冲功率;GT为发射机天线功率增益;GR为接收机天线功率增益;λ为波长;σB为双基地雷达的目标等效反射面积;FT为发射机到目标路径的方向图传播因子;FR为目标到接收器路径的方向图传播因子;k为玻耳兹曼常数;Ts为接收机噪声温度;Bn为接收机带宽,以保证通过发射信号所有频率分量;为检测所需信噪功率比;LT为发射损耗因子;LR为接收损耗因子;κ为双基地雷达最大距离积。
在双基地雷达距离方程中,最大距离乘积RTRR代替了单基地雷达距离方程中的R2,其中R=RT=RR是单基地雷达系统中发射机到目标和目标到接收机的距离。由于传输路径和接收路径之间的差异,导致单基地雷达和双基地雷达工作之间存在显著差。
其中,单基地雷达的探测轮廓是圆,而双基地雷达的探测轮廓是卡西尼椭圆。卡西尼椭圆被定义为两点距离乘积为常数的点的轨迹。图2 显示了卡西尼椭圆的两个固定点(F1和F2),基线距离为2c。

图2 卡西尼椭圆
将卡西尼椭圆的概念应用于图1 中基线为L,距离积为RTRR的双基地三角形中,恒定信噪比(SNR)功率比的表达式可由式(1)导出:
根据图1,将RT和RR被转换为极坐标(r,θ),根据余弦定理可得
坐标原点在基线的中点。将式(5)、式(6)、式(7)代入式(4),得到定义恒定信噪比轮廓的表达式:
已知基线L,(RR+RT)和θR从机会发射端和接收端得到并测量,则RT和RR计算为
在图1 的双基地三角形中使用余弦定律可以得到
2 系统探测性能分析
2.1 系统模型
本文所采用的多基地雷达系统是由一个接收机和多个发射机组成,探测目标假定为一艘货船和一艘隐身舰船,该场景的图形表示如图3 所示。本文主要的研究难题是如何获取探测目标的RCS数据,目前最常用的雷达截面积预测方法有物理光学、微波光学、矩量法、有限元法和有限差分法。我们在CST Studio 中创建了普通货船和某隐身舰船的三维模型,并将其导入到FEKO,使用物理光学法计算它们的雷达散射截面积。物理光学方法适用于光频区目标的雷达散射截面积预测。

图3 多基地雷达系统图形表示
2.2 FEKO模型
利用电磁仿真软件FEKO 对海上目标的双基地雷达散射特性进行了建模和分析。选择一艘普通货船和隐身舰船作为海上目标。在计算机仿真技术(CST)微波工作室(MWS)中创建了普通货船和隐身舰船的三维模型,导入到FEKO 中,生成S波段的双基地雷达截面积数据。图4 和图5 分别显示了普通货船和隐身舰船的模型,假设所有表面都是完美导体。

图4 普通货船模型

图5 隐身舰船模型
图6 和图7 显示的是普通货船和隐身舰船在入射角10°下的双基地雷达截面积,可以看出,隐身目标经过整形和雷达吸收材料的处理,雷达系统很难捕捉到,反射角的微小变化就可以导致RCS回波值的显著差异。因此,为了确保模型的准确性,在给定所需的入射角和接收角的情况下,调用FEKO来计算准确的RCS值是可行的。
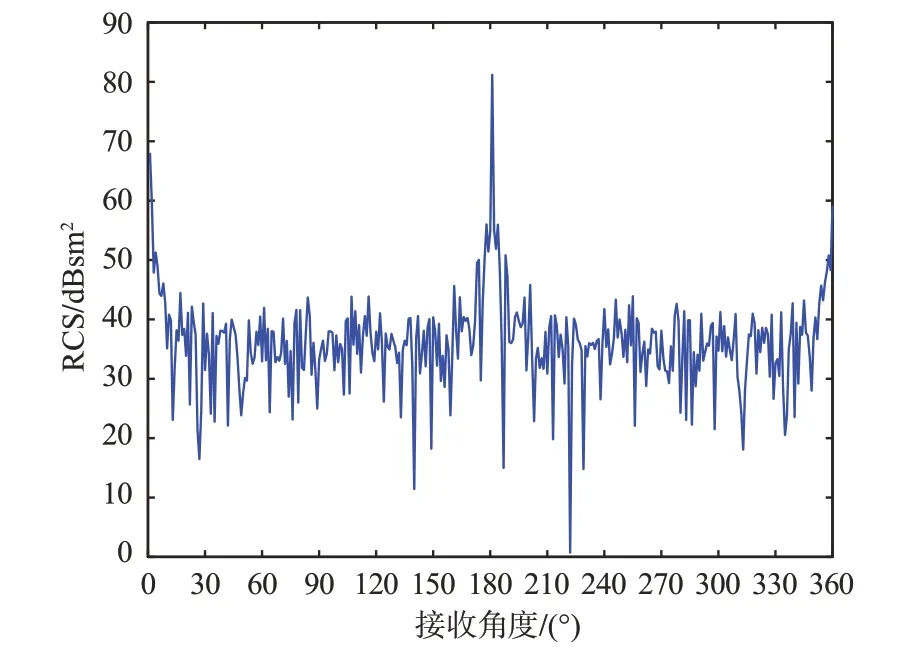
图6 入射角1°,3 GHz下的普通货船双基地RCS值
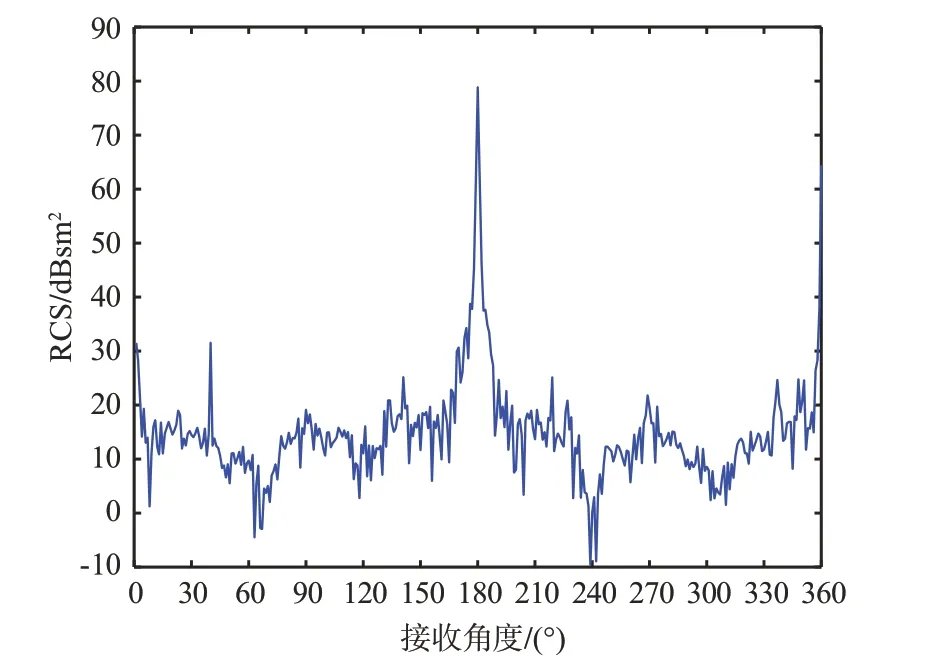
图7 入射角1°,3 GHz下的隐身舰船双基地RCS值
2.3 MATLAB模型
在MATLAB 中使用FEKO 仿真模拟的海上目标RCS 对海上场景进行建模。利用MATLAB 模型对探测覆盖范围进行了仿真,然后对仿真结果进行了检验,提出了最优的多基地雷达系统配置和几何结构。
图8给出了每个步骤的每个发射机-目标-接收机对的检测覆盖模型的概述。该模型在给定双基地入射角和接收角的前提下,从预先计算好的RCS表中通过插值方法提取RCS值,这大大缩短了模拟时间,因为模型不需要对每个角度都执行FEKO。
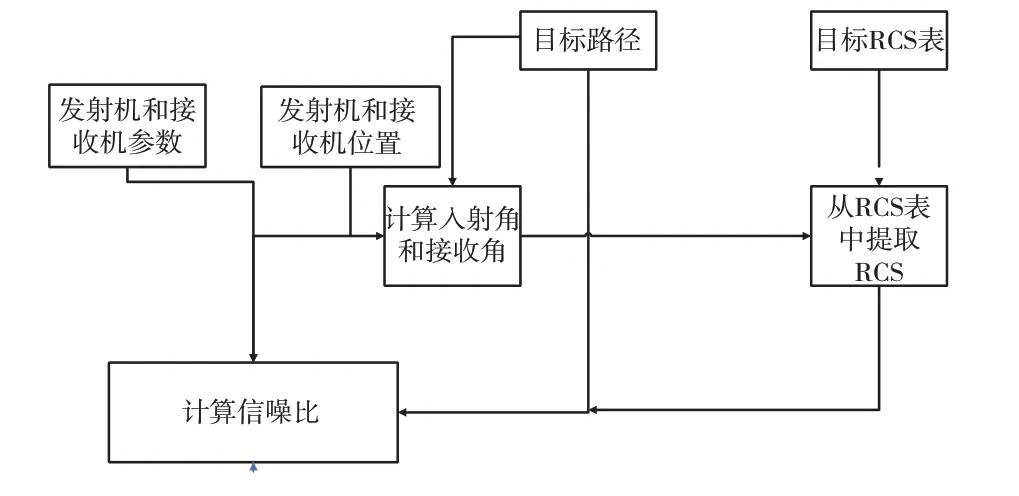
图8 MATLAB检测覆盖率模型
探测覆盖模型还计算目标位置的接收信噪比。该模型需要以下输入文件和参数来生成检测覆盖率汇总图:
1)目标路径信息;
2)目标双基地雷达截面积表;
3)发射机参数;
4)接收机参数。
检测覆盖模型为前者生成目标路径上的接收信噪比,后者生成检测覆盖图。使用目标的CADFEKO 模型,在FEKO 中预先计算出各种入射角和接收机双基地角的RCS 值表。通过在模拟检测覆盖之前生成更高分辨率的RCS 表,可以提高RCS表的双基地角度分辨率。最后,发射机、电子战(EW)和测向(DF)接收机的S 波段雷达参数基于商业可用系统的技术规格。
3 仿真结果
在本节中,使用检测覆盖率模型仿真不同多基地雷达发射机-目标-接收机几何结构的检测覆盖率,并提出了最佳的检测覆盖的多基地配置和几何结构。研究发射机的数量、发射机到接收机的距离对系统探测性能的影响。
3.1 参数设置
本文选择S波段雷达作为发射机,其参数如表1所示。
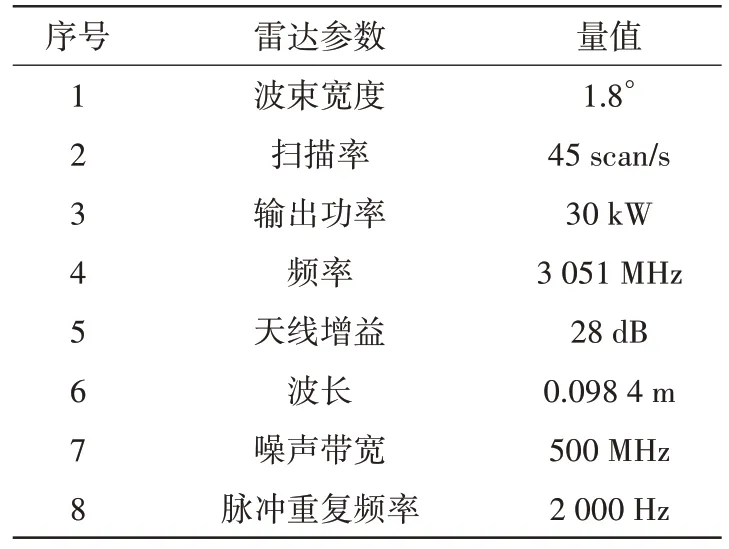
表1 雷达参数
3.2 改变发射机的数量
发射机的数量影响雷达系统的探测覆盖范围和强度。如图9 和图10 所示,当基线距离为10 km时,由于隐身舰船的RCS 小于普通货船的RCS,当系统中有一、两个发射机时,雷达的探测效果很差,因此我们提出了采用多个发射机对隐身目标进行探测,以提高雷达系统的探测性能。
图9 普通货船的信噪比检测覆盖率图
图10 隐身舰船的信噪比检测覆盖图
3.3 改变发射机到接收机之间的距离
发射机到接收机的距离决定了发射机-接收机“网”的大小。图11 和图12 检测覆盖图表明,该系统对普通货船进行检测,当基线距离为20 km时,检测范围和覆盖率达到最好的效果,当基线距离为25 km 时,虽然检测范围有所增大,但出现了检测间隙,检测覆盖率有所下降;对隐身军舰检测时,基线距离为10 km 时比15 km 时的探测效果要好;也表明该雷达系统适用于不同的海上目标检测,对不同的海上目标需要找到其最优的系统配置。从图11 和图12 可以看出,当发射机数量越多,距离越远时,发射机的整体覆盖效果越好,它们能够提供更好的整体覆盖范围和更小的检测间隙,发射机的最小数量是4个,为了在系统参数和发射机-接收机特殊组合下实现最大探测覆盖率,因为普通货船的RCS 值容易被检测到,建议基线距离为20 000 m;隐身舰船的RCS 值较小,建议基线距离为10 000 m。
图11 普通货船的信噪比检测覆盖图
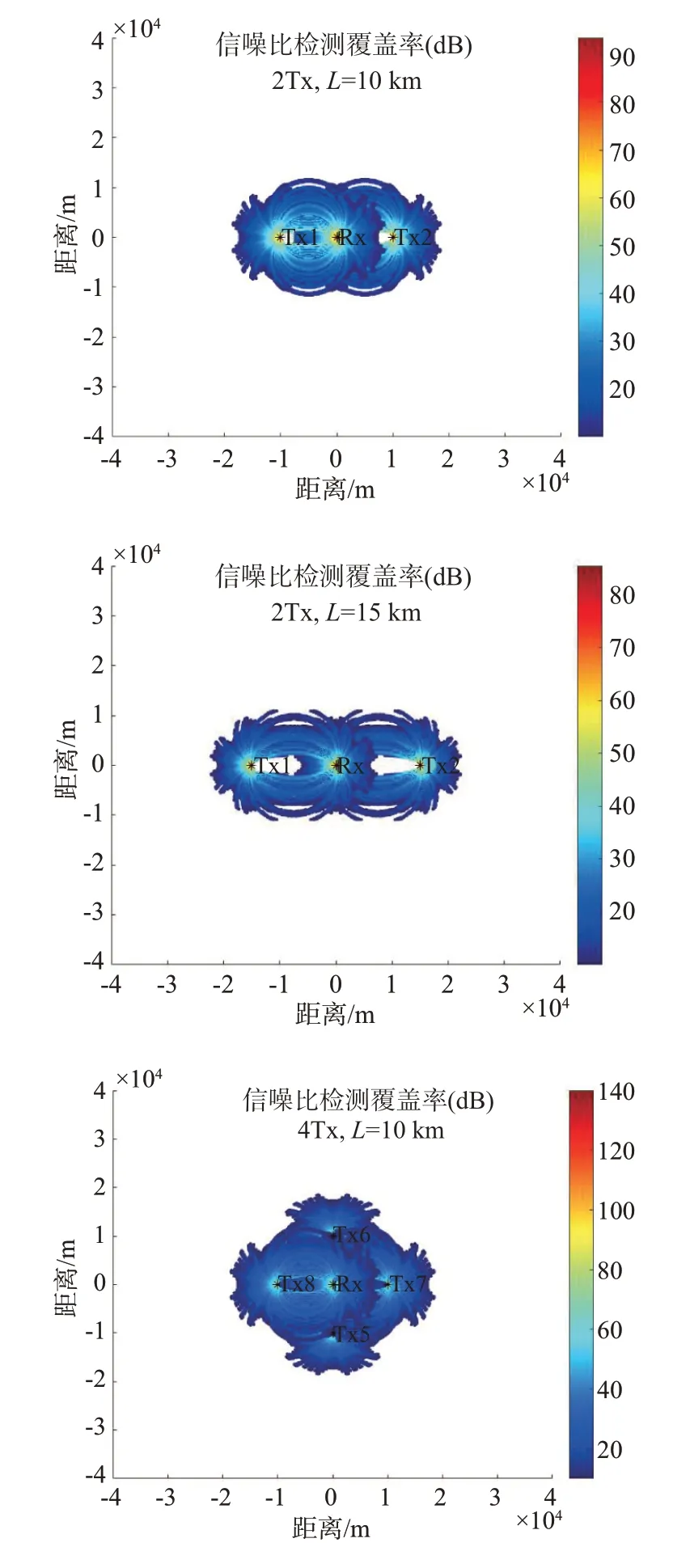
图12 隐身舰船的信噪比检测覆盖图
4 结束语
本文采用非合作多基地雷达系统对海上目标进行探测性能的分析,由于实验环境受限,只能采用电磁仿真得到数据,该方法首先构建普通货船和隐身舰船的三维模型,其次对模型的细节进行处理,让其达到电磁仿真软件的要求,然后用FEKO 软件对处理好的模型进行电磁计算,得到两组360×360 的RCS 值,最后根据计算的RCS 值,验证了该系统的有效性。仿真结果表明:得到系统中存在4 个机会发射机就能得到较好的探测范围和检测覆盖率,8 个发射机并不能显著扩大其探测范围;该系统对不同的海上目标需要设置不同的基线距离,在一定的基线距离范围内,基线距离越大,系统的探测范围越大,但超出范围以后,检测覆盖率有所下降;最后,非合作多基地雷达系统不仅适用于探测普通货船,对探测低RCS 的隐身舰船也是有效的。非合作多基地雷达不需要建造昂贵的系统,系统需要的信息也很容易从别的舰船上获取,这些信息还可以被提取出来,然后用来进行跟踪;在安全性方面,消除了主动雷达被发现的风险,同时增强了雷达系统的生存能力,保障军舰在没有工作雷达或雷达损坏的情况下继续跟踪目标信息,对实际应用有着深远的指导意义。
