一种靶弹多功能控制器设计与实现
2024-04-01付京来
杜 江,王 鑫,王 刚,付京来
(中国人民解放军91851部队,辽宁 葫芦岛 125001)
0 引言
靶弹是模拟敌方来袭导弹技战术特性的实体空中靶标。高性能的靶弹系统,是试验鉴定部门考核防空兵器系统不可或缺的重要装备,为防空兵器的某些极限战术、技术性能考核及验证提供条件,为防空兵器系统的完善与升级以及部队防空反导训练水平的提升提供重要试验保证[1-2]。靶弹系统在具备较高技术性能的同时,还应具有较好的经济性,便于在实弹训练中广泛应用并发挥作用[3-4]。
本文创新了靶弹制导控制方式,研制了集电气改装、接口转换、目标导引、安全控制功能于一体的靶弹多功能控制器(以下简称靶弹控制器),实现了退役导弹到多用途靶弹的通用化、标准化改装,探索了一种经济而有效的靶弹开发方法。
1 退役导弹改装面临的主要问题
在当前退役飞航导弹改装靶弹工程实践中,存在着以下急需解决的问题:
1)导弹系统是一个时序逻辑严格、相互配合紧密的统一整体,弹载设备高度集成、技术状态复杂且信号相互交联,对导弹技术状态和工作时序的任何改动都可能牵一发而动全身,对全弹其他系统的工作造成影响。如何从全局出发,精确调整导弹原有技术状态,实现导弹到靶弹的功能转变,是靶弹改装需要解决的首要问题。
2)靶弹用于武器装备试验与部队训练演练,既要模拟敌方来袭导弹的攻击态势,又要保证绝不能误伤目标(被试防空武器平台)。在对运动目标供靶时,如何精确控制飞行航路,实现供靶逼真性和安全性的统一,是靶弹改装需要解决的第二个问题。
3)退役导弹技术状态和使用流程较为固化,而国外现役飞航导弹信号繁多、技战术特点各异,如何使一型靶弹具备多种功能,使靶弹适应性更强,是靶弹改装需要解决的第三个问题。
2 系统设计方法
2.1 导弹自动控制回路分析
导弹是一种能够对目标进行自动寻的跟踪和攻击的无人飞行器,某型退役导弹系统存在两种控制回路,一是末制导雷达自身搜索跟踪目标的(小)控制回路[5-8];另一种是末制导雷达开机并捕获目标后存在的末制导雷达-飞行控制系统-目标等组成的飞行(大)控制回路[9-10]。其中飞行(大)控制回路一般包括导弹转向控制和降高控制两种控制功能。某型退役导弹自动控制回路具体工作过程如下:
在导弹发射后,弹上末制导雷达在装订的开机时刻接通高压发射电磁波,在预定区域搜索目标,完成自身小控制回路的稳定捕获跟踪。然后向弹上自动驾驶仪发送航向制导指令和表征目标偏离弹轴角度的航向制导控制电压信号,接通导弹制导大控制回路,弹上自动驾驶仪接收到航向制导指令后操纵航向舵机转动,控制导弹航向对准目标方向。当距离目标若干位置点时,末制导雷达向弹上自动驾驶仪发送高度制导指令,弹上自动驾驶仪接收到高度战斗指令后控制俯仰舵机开始降高飞行,直至击中目标。
在导弹发射前的射前检查阶段,地面/舰面射检发控设备向弹上发出射前检查指令,末制导雷达模拟产生目标回波并完成稳定捕获,然后向自动驾驶仪发出航向制导指令、航向制导控制电压信号和高度制导指令,驱动舵机转动,在地面/舰面完成导弹两种控制回路的联动和检查。某型退役导弹制导控制链路如图1所示。

图1 某型退役导弹制导控制链路示意图
2.2 导弹到靶弹的状态转换方法
与导弹不同,靶弹是模拟敌方来袭导弹技战术特性的空中实体靶标,靶弹的供靶目标是防空武备载体平台,靶弹在逼真模拟敌方导弹攻击态势的同时,绝对不能对目标进行攻击,以确保反导试验训练的安全。因此除特殊需要外,在靶弹飞行时必须切断制导控制回路,绝不允许靶弹在对目标进行精确跟踪和攻击。同时靶弹在地面/舰面发射前的射前检查阶段,需要保持导引头和自动驾驶仪之间的正常联系,以确保靶弹能够通过射前检查正常发射。对导弹控制回路特性的改变是导弹改装靶弹的首要任务。
针对导弹设备高度集成、技术状态复杂的实际情况,断开末制导雷达和弹上自动驾驶仪之间的连接关系,新研靶弹控制器串联于弹上末制导雷达和自动驾驶仪之间,作为两者连接的纽带。在射前检查等需要接通制导控制回路的时候,靶弹控制器保持两者之间的正常联系;在靶弹飞行时,自动断开制导控制回路或修改制导控制规律以确保供靶安全。改装后靶弹主要控制信号连接关系如图2所示。
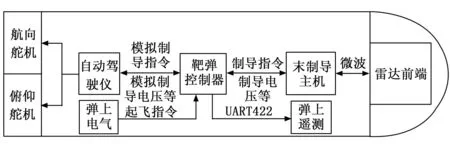
图2 改装后靶弹主要控制信号连接关系
通过靶弹控制器改变末制导雷达与飞行控制系统的接口关系,实现退役导弹到多功能靶弹的改装,不需改变弹上导引头、飞行控制系统内部的工作状态,不需对舰面射检设备进行改装,具有操作简便、灵活、通用性好等优点。同时改装操作可逆性好,如果有需要,可恢复原电缆连接关系将靶弹改装回导弹状态。
2.3 动目标供靶航路精确控制方法
在靶弹发射后,防空武器载体平台在探测到靶弹进行模拟攻击后,会在实施拦截的同时,遂行各种战术机动动作以规避靶弹。若完全切断制导控制回路,在防空武器平台实施机动时,不能实时感知拦截平台动态位置和运动情况来调整供靶弹道,导致实际的航路捷径过大或过小。当航路捷径过大时,靶弹模拟敌方来袭导弹弹道的逼真性不足,达不到考核目的;若航路捷径过小,则试验安全风险加大,一旦拦截失败,存在误伤防空武器载体平台的重大安全隐患。
为此,以导弹导引控制规律为基础,结合靶弹供靶使用特点,创新设计了一种靶弹导引供靶方法,可实现靶弹对运动目标供靶时航路捷径精确可控。在导弹制导控制回路中,导弹末制导雷达向自动驾驶仪输出的航向制导控制电压信号,和目标与导弹末制导雷达天线轴向的方位偏差角度信号φct成正比,其大小表征目标偏离天线轴向角度的大小,其正负表征目标偏离天线轴线的方向[14-15],以引导导弹攻击目标。与导弹制导规律不同,在靶弹导引供靶飞行模式下,靶弹末制导雷达向自动驾驶仪输出的信号为综合误差信号ψzt,是目标方位差信号φct与目标偏离角信号φst之差。其中目标偏离角信号φst是目标靶弹航路捷径R0(目标到靶弹航路的最小距离,由射前装订)与目标距离Dt(由靶弹末制导雷达实时测得)之商的反正切函数,其正负与目标方位差信号φct一致,保证目标运动时靶弹航路捷径始终不变。计算公式如下:
ψzt=φct-φst
(1)
φst=sgn(φct)*tan-1(R0/Dt)
(2)
φct保证靶弹能够跟踪运动目标,φst保证不论目标如何运动,靶弹航向始终偏离目标一个误差角度,在保持航路捷径不变的情况下进行跟踪但不完全对准目标。有源导引供靶飞行模式下靶弹弹道如图3所示。从图3中可见,靶弹从O点发射后,目标从M0随机运动到M1时,靶弹航路捷径仍为R0,保持不变。

图3 有源导引供靶飞行模式下靶弹弹道示意图
2.4 靶弹功能拓展方法
由于退役导弹控制系统状态固化功能单一,难以满足多样化供靶需求。为此,靶弹控制器设计采用高性能计算机和标准化的靶载设备操控模块,可完成靶弹状态管理和资源的统一调度,成为全弹的控制核心。在靶弹控制器的综合管控下,退役导弹在改装后,可具备有源供靶、无源供靶、动目标精确供靶、电子对抗等多种功能组合。
1)有源供靶:
有源靶弹是指靶弹在供靶过程中发射电磁波跟踪、辐射防空武器载体平台,模拟敌方主动雷达制导导弹的电磁辐射特性和攻击方式,是导弹类靶标体系中的一个重要分支[11-13]。在有源靶弹供靶时,靶弹控制器控制末制导雷达保持自身捕捉跟踪的小控制回路的正常工作,但切断其制导控制链路,不会向自动驾驶仪输出制导控制指令和制导控制电压,末制导雷达-飞行控制系统-目标等组成的飞行(大)控制回路不工作,靶弹按自控弹道飞行。
2)无源供靶:
无源靶弹在供靶过程中不辐射雷达信号,不模拟主动雷达制导导弹的电磁辐射特性。在退役导弹改装为无源靶弹时,通常末制导雷达不通电工作,可作为配重或者拆掉导引头整机安装脱靶量测量等靶载任务设备。此时靶弹控制器需代替拆除的末制导雷达完成与全弹其他系统的电气信号协调,确保射前检查和发射流程的顺利进行。
3)动目标精确供靶:
在靶弹实施对动目标精确供靶时,靶弹控制器实时监测末制导雷达工作状态并根据目标运动情况自动修正制导控制规律,同时判断修正后的靶弹弹道是否飞出安全管道,必要时实施自毁控制,确保试验安全。
4)电子对抗型靶弹:
在电子对抗型靶弹中,靶弹控制器具备双向控制功能,一方面根据供靶态势确定干扰时机和干扰参数,控制电子对抗设备工作实施干扰;另一方面根据电子对抗设备的侦查信息和干扰实施情况,控制靶弹实施机动等战术动作。
3 靶弹控制器总体设计
3.1 硬件设计
靶弹控制器硬件由主控模块、信号调理模块和卫星信号接收机模块(含天线及馈线)等组成。主控模块是靶弹控制器的控制核心,负责程序运算、数据存储、模拟量采样与输出、串口通信和开关量采样与输出等功能。信号调理模块由稳压电源模块、接口控制电路、模拟信号调理电路、开关信号调理电路、指令输出电路等构成,主要用于完成靶弹控制器供电、靶弹与靶弹控制器之间模拟信号、开关信号的调理适配以及指令输出等功能。卫星信号接收机模块负责GPS/北斗卫星信号的接收和解析。
主控模块以DSP芯片为处理核心,外部扩展ROM、D/A、A/D、FPGA串口缓存等器件。外部ROM为512 k×16位的Flash芯片,用于存储任务参数等信息;D/A芯片具有4路(实际使用1路)12位的D/A通道,输出电压-10~+10 V;A/D芯片具有8路(实际使用5路)16位的A/D通道,采样电压10~+10 V;FPGA芯片具有4 608个逻辑单元,用于实现总线控制;3路64位串口缓存用于与卫星信号接收机模块、测试设备、遥测设备的通信。串口缓存与外部设备之间采用变压器型串口通信隔离器件,以解决设备间串口通信的干扰及地隔离问题。主控模块采用±15 V和+5 V电源供电,其中±15 V为A/D、D/A芯片供电,+5 V经稳压芯片调整为+3.3 V、+1.8 V、+1.2 V后为其他芯片供电。+5 V地线为数字信号地,±15 V地线为模拟信号地。模拟地和数字地之间通过磁珠单点连接共地。
主控模块基本结构如图4所示。
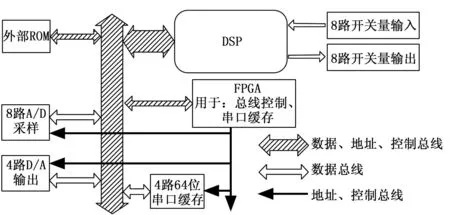
图4 主控模块基本结构示意图
3.2 系统软件设计
系统软件采用C语言编写,由主控软件模块和功能软件模块组成。主控软件模块是系统的控制核心,其功能是合理配合芯片资源,完成硬件初始化、任务参数装订、工作模式转换、基本输入输出等工作。系统加电后,首先完成系统初始化,然后读取任务参数,检测起飞指令是否发出,若起飞指令未发出,则进入射前检查模式;当起飞指令发出后,进入各飞行控制功能模式,同时启动自毁检测控制线程;飞行控制功能模块包括射前检查模块、有源供靶模块、无源供靶模块、动目标精确供靶模块、电子对抗供靶模块等。各功能模块均使用独立函数设计,满足系统快速升级和移植需求。
系统主控软件模块工作流程如图5所示。
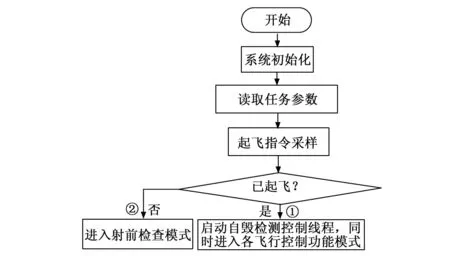
图5 主控软件模块流程图
4 具体功能实现方法
1)起飞指令监测:
起飞指令是靶弹起飞与否的重要标志信号,靶弹控制器必须准确判断起飞指令以调整自身工作状态。靶弹控制器采用光电隔离调理电路对来自靶弹平台的靶弹起飞指令信号进行信号转换和采集,D1光电隔离调理电路包括一组输入端(1、2)和一组输出端(3、4)。起飞指令串联限流电阻R1连接D1的输入1端,D1的输入2端接靶弹地线;D1的输出3端接靶弹主控模块数字5 V,输出4端串限流电阻R2接靶弹主控模块数字地,同时接靶弹主控模块数字I/O检测端口,由主控模块进行信号判别。如果信号为高电平,则判定靶弹起飞指令发出,如果信号为低电平,则判定靶弹起飞指令未发出。靶弹起飞指令信号的产生与采集电路如图6所示。
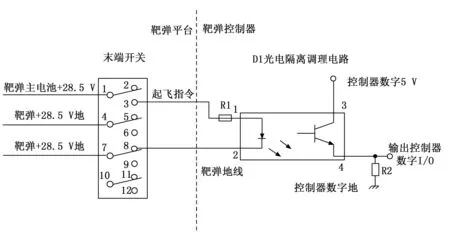
图6 靶弹起飞指令信号的产生与采集电路原理图
2)电气改装与接口控制:
靶弹控制器采用接口控制电路作为末制导雷达与外部设备的联系通道,由CZ1、CZ2、CZ3信号端口组成。CZ1端口是输入端口,来自末制导雷达或主控模块模拟产生的航向制导指令、高度制导指令、航向制导控制电压信号等信号均由该通道输入;CZ2是输出端口,转接后的制导控制电压和制导控制指令由该端口输出至自动驾驶仪;CZ3是射检设备发出的射前检查指令输入端口,由雷达与射检设备连接插座的对应针脚引出,射前检查指令输出给雷达的同时,也输出至本接口控制电路。电气改装原理如图7所示。

图7 电气改装原理图
接口控制电路由继电器J1、J2等组成。用靶弹射检设备的“射前检查指令”或主控模块在动目标精确供靶模式下产生的“导引供靶指令”作为继电器K1、K2的触发信号,控制该联系通道的通断。只有“射前检查指令”或“导引供靶指令”发出后,K1、K2继电器动作,该接口通道才能导通,将末制导雷达的制导指令和制导控制电压传至自动驾驶仪,保证靶弹制导控制回路正常工作;若“射前检查指令”或“导引供靶指令”均未发出,K1、K2 继电器不动作,该接口通道处于断开状态,末制导雷达不会引导靶弹攻击目标,保证目标安全。接口控制电路原理如图8所示。
图8 接口控制电路原理图
3)动目标精确供靶:
动目标精确供靶是靶弹控制器重要的控制功能。为确保试验安全,在进行动目标精确供靶时,首先要检查靶弹末制导雷达是否工作正常且已稳定捕获预定目标,当下列3种情况之一出现时:
①末制导雷达在距离上和方位上搜索若干时间而未捕捉目标;
②末制导雷达捕捉不稳或旁瓣捕捉;
③末制导雷达捕捉的目标不是预定目标;
则表示末制导雷达工作状态不稳定或未能正常捕获预定目标,需要及时退出动目标精确供靶模式,按靶弹原自控弹道飞行。
具体地,靶弹控制器采集制导指令、目标距离及目标角度等信息,同时对导引头开机时间进行计时,完成雷达导引头工作状态实时监测,判断雷达捕获的目标是否为射前装订的预定目标;然后实时解算综合误差信号并输出,直到达到靶弹雷达导引头跟踪下限为止。动目标精确供靶流程如图9所示。
图9 动目标精确供靶软件模块流程图
4)靶弹安全控制:
为确保靶弹供靶安全,靶弹控制器集成了靶弹安全控制功能。在发射前装订靶弹飞行安控管道,靶弹起飞后,采用卫星信号接收机实时测量靶弹位置,判断是否飞出射前装订的安控管道,判断周期100 ms;若靶弹连续5次飞出安控管道,靶弹控制器可直接操舵实施靶弹自毁。
卫星信号接收机模块采用成熟货架产品,其主要技术为:接收点频:BDS-B1/B3、卫星接收机-L1;定位信息更新率:10 Hz;动态单点定位精度:≤30 m;测速精度:≤0.5 m/s。靶弹自毁指令输出电路由双刀双掷继电器构成。当靶弹实施自毁时,主控模块通过固态继电器发出“主动自毁指令”,双刀双掷继电器动作,自动驾驶仪与舵机之间的联系被断开,同时主控模块通过DA发出自毁控制信号,经如图10所示的信号调理电路隔离后,直接输出到舵机,操纵舵机实施自毁。
图10 自毁控制信号调理电路
5 试验及结果分析
为验证对动目标供靶时的有源导引功能和性能,采用基于PXI总线的虚拟仪器构建了一套靶弹仿真测试设备,采用程控雷达信号源和程控目标模拟器模拟目标航迹,对靶弹控制器进行半实物仿真测试。靶弹测试仿真设备可以采集靶弹控制器的制导指令和制导控制电压,进行靶弹控制器性能检测和靶弹运动轨迹解算,完成靶弹弹道仿真。
程控雷达信号源工作于外触发状态,以雷达导引头同步信号作为触发源,产生大于1毫瓦的功率输出,输出信号与触发信号之间的时延表征目标距离,并可根据目标距离对输出射频信号分档衰减。程控目标模拟器的作用是模拟目标在不同方位上偏离雷达导引头天线的等强信号线,程控目标模拟器天线与末制导雷达天线轴向夹角代表目标方位偏差角度。程控雷达信号源与喇叭天线采用同轴电缆连接。通过目标距离和目标方位偏差角度的不断变化模拟目标的运动情况。靶弹仿真测试设备和程控雷达信号源之间采用RS422串口连接。靶弹控制器仿真测试系统组成与连接连接关系见图11。
图11 靶弹控制器仿真测试系统组成示意图
半实物仿真过程如下:首先预设靶弹供靶理论弹道和理论航路捷径,而后启动靶弹测试仿真设备和靶弹控制器。靶弹测试仿真设备输出+27 V的“起飞指令”,让靶弹控制器进入对动目标精确供靶飞行模式,同时程控雷达信号源和程控目标模拟器模拟目标航迹;在靶弹模拟飞行过程中,靶弹控制器输出制导控制指令、目标距离电压、目标综合误差信号等制导信息,靶弹测试仿真设备对制导信息进行监测采样,实时解算靶弹弹道、弹目距离和位置关系以及航路捷径,最后将航路捷径计算结果与设定的航路捷径与进行比较。经试验,航路捷径仿真结果与理论航路捷径之间误差最大值为120米,该误差为系统整体误差,包括定位误差、控制误差、采样误差等,满足系统设计要求。
6 结束语
本文设计了一种靶弹多功能控制器,在不改变弹上末制导雷达、自动驾驶仪以及地面/舰面指挥仪等设备内部的工作状态的前提下实现导弹到多功能靶弹的标准化改装,具备简便可靠、工作量小、通用性好、弹道控制灵活等突出特点,较好地解决了靶弹改装难题,满足防空武器系统试验训练的需要。
