基于卷积神经网络算法的城市轨道交通施工人员不安全行为智能识别技术*
2024-03-27乔国刚
郭 飞 孔 恒 乔国刚
(北京市政建设集团有限责任公司, 100048, 北京)
1 城市轨道交通施工人员不安全行为产生机理
不安全行为产生的本质上是人的行为选择,主要来源于人的错误推测、意外的动作、错误判断和不安全思想。通常采用人的一般行为机制模式,即刺激-个体生理心理-反应模型来描述此特征。认知理论中将人的认知分为发现信息、理解信息、思考应对、执行应对等4个环节;行为约束理论中认为人处在社会大环境中,人的行为产生受到社会大环境的约束[1-2]。依据行为机制模式、认知理论及行为约束理论,结合城市轨道交通的施工特点,构建城市轨道交通施工人员不安全行为产生机理(见图1)。
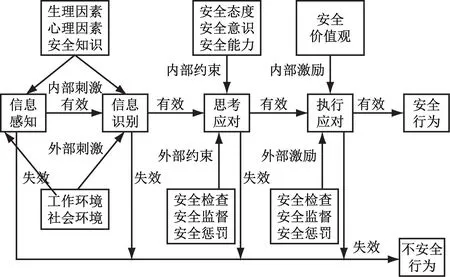
图1 城市轨道交通施工人员不安全行为产生机理
结合城市轨道交通施工的实际工作环境,施工人员不安全行为产生机理阐述为[3]:第1个环节为施工人员通过耳、鼻、眼等感知器官接收到危险信息信号。第2个环节为施工人员在接收到危险信息信号后,对信息信号的辨识理解。前两个环节主要表现为施工人员受到自身心理、生理、安全知识等内部自身素质,以及现场环境、人际环境等外部环境的刺激。第3个环节为施工人员对危险信息进行思考并在大脑中检索应对方案,此过程受到自身安全意识、态度、能力等的内部约束,以及安全监督、检查、惩罚情况等的外部约束。第4个环节为施工人员按照思考出的应对方案选择执行,选择执行与否受到自身安全价值观的内部激励和安全行为激励的外部激励影响。若每个环节输出均有效,将会促使施工人员做出安全行为;反之,若有1个环节输出为无效,将会促使施工人员做出不安全行为。
2 施工人员不安全行为识别方法
2.1 高精度定位技术
采用UWB(超宽带无线通信)高精度定位系统,对施工人员的不安全行为进行识别。该系统具有人员精确实时定位、电子围栏、关键位置点摄像机联动、现场安全作业标准化、现场声光报警和广播通知、防碰撞及违规接触设备预警及运动轨迹回放等功能。该系统通过计算出移动标签与定位基站之间的距离,再通过特有算法定位标签位置,以判断定位卡位置的人员范围,同时利用动态图形对其进行显示[4]。UWB高精度定位系统结构示意图见图2。
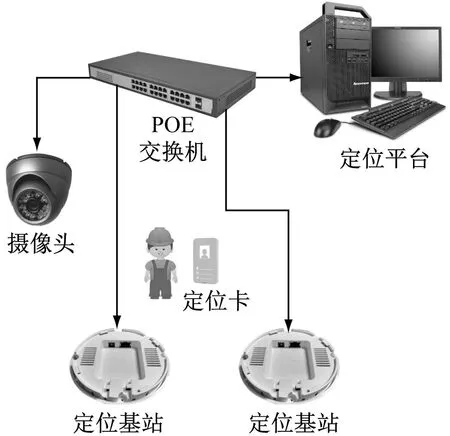
注:POE为以太网供电。
因此,城市轨道交通施工人员不安全行为精确定位技术通过人员定位卡、摄像头、UWB通信、定位基站多终端结合模式,自动识别施工人员对于城市轨道交通施工过程中可能出现的位置隐患,通过定位技术来解决由于位置隐患带来的不安全因素。
2.2 摄像机自标定技术
若要实现危险源的智能识别,需首先进行摄像机标定,目的在于获得摄像机的内外参数及畸变参数,进而矫正畸变并重构三维图像。
假定空间一点的世界坐标为Pw(Xw,Yw,Zw),摄像机坐标为Pc(Xc,Yc,Zc),图像坐标为Pu(Xu,Yu),则从摄像机坐标系到图像坐标系的转换表示为:
(1)
式中:
Xd、Yd——转换系数。
采用的畸变模型为:
(2)
式中:
k1、k2、k3——径向畸变系数;
p1、p2——切向畸变系数。
从世界坐标到像素坐标之间转换的实现,需经历摄像机坐标与图像坐标,得到式(3):
(3)
式中:
s——适应齐次坐标的比例因子;
c——不垂直因子,一般情况下感光元件为矩形,故设为0;
fg、fh——摄像机在图像像素坐标系中以像素为单位的焦距;
g、h——摄像机的坐标;
g0、h0——图像像素的坐标;
R、[Objective]——旋转矩阵和平移矩阵。
最后,求出摄像机参数,即:内参数fg、fh、g0、h0、k1、k2、k3、p1、p2,外参数R、[Objective]。
为了使提取的图像具有高清晰度,需对其进行预处理。本研究采用装置内嵌的机器视觉库来进行处理。图像处理流程如图3。
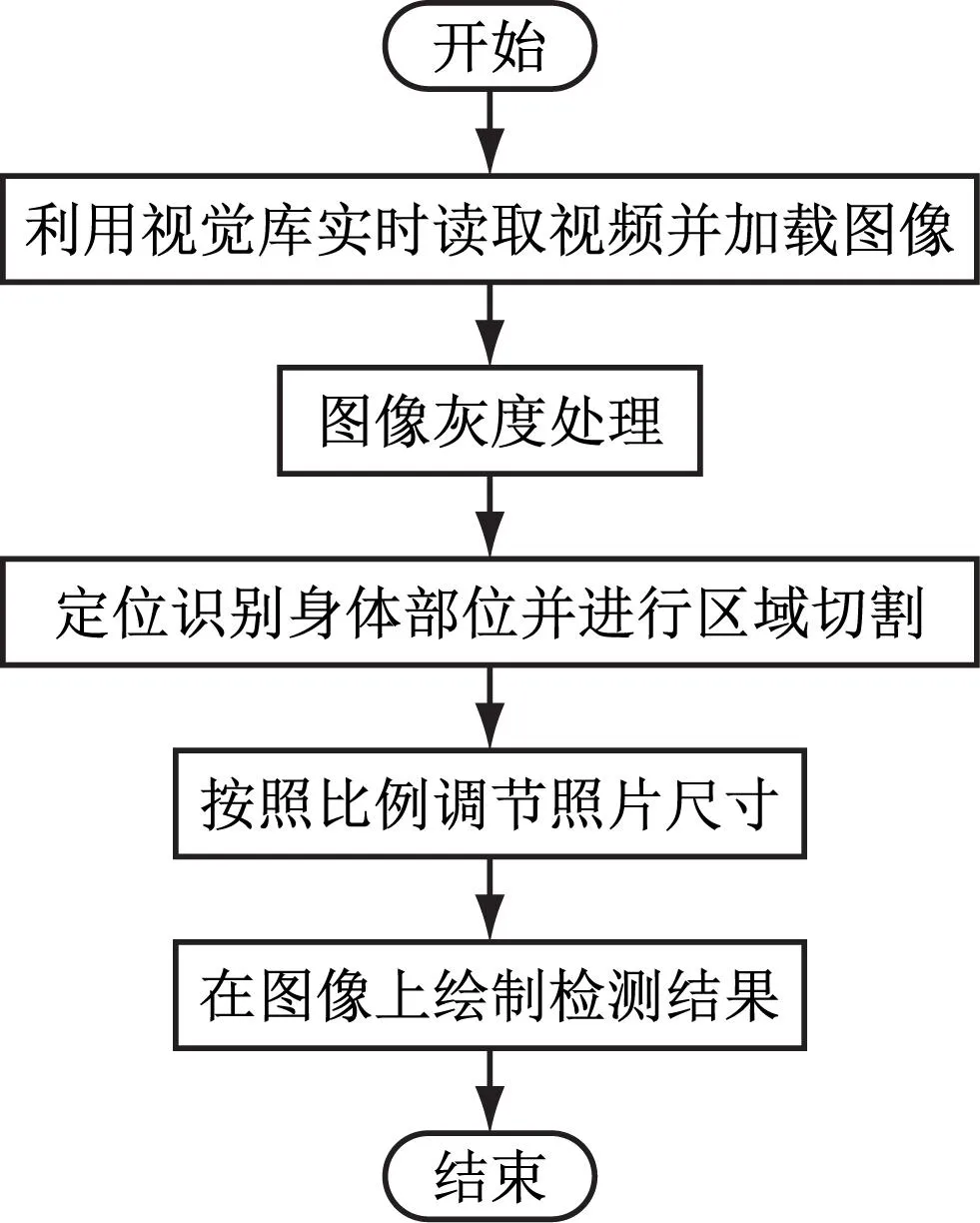
图3 图像处理流程
2.3 基于卷积神经网络算法的智能识别技术
结合卷积神经网络算法,对人不安全行为进行识别。基于卷积神经网络算法的智能识别框架[5-7]见图4。

图4 基于卷积神经网络算法的智能识别框架图
本研究首先采集城市轨道交通施工监控视频数据,包括安全帽、安全带、工服及香烟等物品的正样本,以及数量远大于正样本数量的负样本(即出现在城市轨道交通施工中但无危险性的物品)。在将城市轨道交通施工图像案例预处理后,提取对应图像的融合特征,包括边缘特征、颜色特征和纹理特征;将图像的融合特征转化为像素点并以卷积核(即权重)的形式表示,从而得到卷积层的输出结果;对卷积层输出结果进行匹配,从而基于图像的融合特征实现智能识别。计算模型为[8]:
(4)
(5)
式中:
ηn(ai)——第n特征阶层;
U——灰度级数目;
ai——处理后目标图像灰度随机变量,0≤i≤U-1;
x(ai)——对应的灰度直方图。
通过量纲一化处理,可得到城市轨道交通施工过程中的图像融合特征η3(a):
(6)
基于卷积神经网络算法,进一步从城市轨道交通施工作业现场或重点区域采集的视频画面中提取关键信息,识别出视频画面中的目标特征,以及视频画面中的违章行为,例如,施工人员未进行身份验证、未佩戴安全帽和安全带、未穿戴工服,以及施工现场出现明火烟雾等,并实时预警处理。具体的识别流程为:识别出施工人员行为或着装是否符合安全标准,如果满足则忽略该信息;如果不满足安全需求,系统将会将此情况传输至调度中心并发出报警信号,提示相关人员立即更正错误行为。城市轨道交通施工人员不安全行为的智能识别流程见图5。
3 案例分析
以安全帽识别为例,首先构建安全帽识别拓扑图(见图6)。
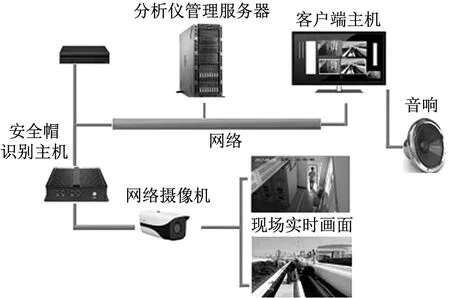
图6 未佩戴安全帽识别系统拓扑图
施工现场安全帽识别流程为:以施工现场的工人为识别对象,以网络摄像机为载体,通过识别主机进行信息筛选并进行网络传输,将信息分别输送到管理储存器、客户端主机等,并对相应的违规行为通过音响进行制止。
对基于卷积神经网络的施工人员不安全行为识别的算法进行准确性测试:基于现场施工图库选取图片作为识别对象,要求图片中同时存在戴安全帽与未戴安全帽的目标对象;基于卷积神经网络算法对图片中的目标对象进行特征提取,并将两个人的状态进行区分。测试表明:本研究的算法可实现对未佩戴安全帽人员的识别,即验证了该算法智能识别的准确性。
因此,在施工现场当摄像机获取的图像中出现未戴安全帽的人员时,软件自动从摄像机视频流中抓拍图像和报警。识别过程中对于安全帽的颜色未限制,并且需满足以下要求:远距离时,人体高度需大于整体图像的 1/10,即人眼可分辨;近距离时,人体至少露出上半身。
进一步进行施工现场安全帽识别试验,如图7所示。通过对城市轨道交通施工人员视频采集终端采集的视频画面分析发现该员工未戴安全帽,将该识别信息上传至调度中心,证明了本研究中识别施工人员不安全行为的准确性。同时施工现场通过语音播报对该行为进行预警,最终实现施工区域未佩戴安全帽行为的智能管理。

图7 施工现场安全帽识别试验
4 结语
针对城市轨道交通施工过程中由于施工人员的不安全行为,以及传统管理模式滞后造成的安全隐患,分析了城市轨道交通施工过程中施工人员不安全行为的产生机理,并对其进行细化分类。基于此综合采用UWB高精度定位技术、摄像机自标定技术及卷积神经网络算法,实现对施工人员的定位,以及对施工人员行为动作的高精度捕捉与智能识别,最终构建集定位、感知、识别、预警和音视频通信功能的一体化综合管理平台,并验证施工人员不安全行为识别的有效性,对保障施工人员的安全和推进城市轨道交通建设的发展有重要意义。
