分块式空间望远镜技术研究现状及其发展趋势
2024-03-24赵凯伦孙德伟黄巧林田国梁贺金平
赵凯伦 孙德伟 黄巧林 田国梁 贺金平
(北京空间机电研究所,北京 100094)
0 引言
空间望远镜一直是国际航天科技领域最具前瞻性、先导性、探索性的标志性成果。与地基望远镜相比,空间望远镜不受大气扰动的影响[1],而且没有地理位置限制,因此在宇宙探索和天文观测方面发挥着重要的作用。随着空间光学和制造技术的发展,人们对宇宙的观测需求不断提高,对空间望远镜的分辨率要求也越来越高[2]。光学系统的角分辨率与通光口径成反比,集光能力与口径的平方成正比,因此增大口径是解决“看得清”和“看得远”的有效途径。
大口径空间望远镜能实现高分辨率和高灵敏度的天体物理观测。研究表明,类地行星的发现速度与望远镜口径的1.8 次方成正比[3];此外,由于日冕仪可以提高成像系统对明亮源周围微弱结构的灵敏度,针对其不同架构,望远镜口径与类地行星的探测数量有如图1 所示的函数关系[4],这一关系也反映出“高分辨率”意味着“大口径”。

图1 望远镜口径与类地行星探索数量的关系Fig.1 Relationship between telescope aperture and the number of Earth-like planets detected
分块式空间望远镜具有发射灵活、易于加工、整体结构轻量化等优势。面对竞争激烈的空间探索,分块式空间光学载荷无疑是未来天基大口径光学的重要发展方向。分块式的概念最早可追溯到1963 年,由诺思罗普·格鲁曼空间技术公司(NGST)提出[5],首先应用于太阳能集中器和微波天线,近年来多用于光学望远镜,主要代表为美国航空航天局(NASA)研制的詹姆斯·韦伯空间望远镜。综上,大口径空间光学载荷已成为世界各国的主流发展方向,分块式空间望远镜作为未来部署大口径空间光学载荷的重要途径,需在关键技术攻关和工程实践中弥补薄弱环节,特别是针对光学层面的高精度、高稳定性操作,其成熟度需进一步升级。本文对国内外分块式空间望远镜技术的研究现状作了梳理,对可展开和在轨组装两条分支涉及到的关键技术作了分析,并由此总结出未来发展还需突破的技术难点,旨在为我国发展大口径空间光学载荷提供借鉴和参考。
1 分块式空间望远镜的国内外研究现状
1.1 国外研究现状
分块式空间望远镜在部署形式上可分为可展开式和在轨组装式两大类,主要实现途径是通过展开机构、机器人/机械臂将若干个分块子镜相互拼接,实现大口径空间望远镜在轨部署。国外对分块式望远镜的研究较为成熟且已实现工程化成果,其中可展开分块光学研究方面,以JWST 为技术代表,在机构展开技术、轻量化反射镜技术、波前检测技术等方面积累了大量的经验,技术基础相对较好,但受展开形式的制约,其压缩率有限;在轨组装式空间望远镜方面不存在重要的技术障碍,而且可维护性好、设计灵活度大、对运载要求相对较低,并在后续“OPTIIX”、“EST”、“iSAT”等多个项目牵引下开展了优势更加明显的在轨组装分块光学研究。部分典型分块式望远镜的详细分析如表1 所示。
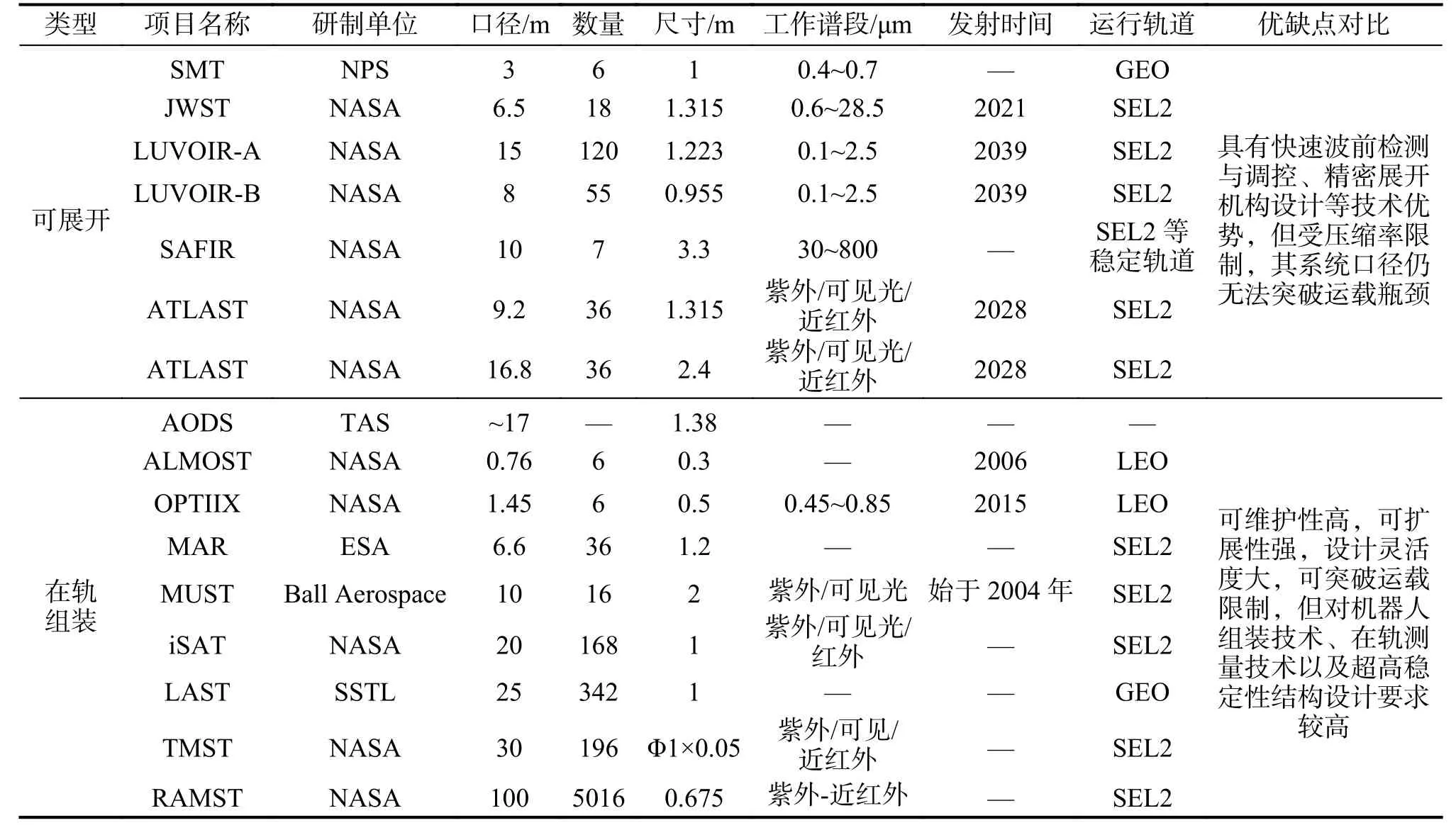
表1 分块式空间望远镜部分项目信息Tab.1 Partial project information of the segmented space telescope
1.1.1 可展开空间光学望远镜
分块式可展开空间光学望远镜是利用可展开机构将多个分块子镜拼接在一起,发射前处于折叠收拢状态,在轨时展开形成大口径空间望远镜,按主镜口径展开大小分类介绍如下。
(1)詹姆斯·韦伯空间望远镜
2021 年12 月25 日,由NASA 牵头研制的詹姆斯·韦伯空间望远镜(The James Webb Space Telescope,JWST)在法属圭亚那库鲁基地发射升空,最终到达日地拉格朗日L2 点。JWST 由18 块边到边距离1.315 m 的六边形子镜构成,组合口径达6.5 m,集光面积达25 m2,如图2(左)所示;JWST 主镜包括固定的中央子镜和两个旁翼子镜,旁翼子镜发射时向后折叠,在轨时由步进电机驱动,通过展开铰链由折叠位置旋转到展开位置,并由每侧的4 个锁紧机构锁紧固定[6]。JWST 次镜支撑为四连杆组成的三脚架结构,发射时向后折叠并固定于主背板,在轨时由步进电机驱动实现“解锁-展开-锁紧”的在轨部署,JWST 主次镜展开过程如图2(右)所示。

图2 JWST 展开后的主镜(左)和主次镜展开过程(右)Fig.2 Primary mirror deployed(left)and the deployment sequence of JWST(right)
(2)大型紫外/可见光/红外巡天望远镜
NASA 提出一种在设计上与JWST 类似的大型紫外/可见光/红外巡天望远镜(The Large UV/Optic/Infrared Surveyor,LUVOIR),用于探索宇宙发展,揭示生命起源,预计2039 年发射,其包含LUVOIRA 和LUVOIR-B 两种设计方案。
LUVOIR-A 采用同轴光学设计方案,主镜由120 块边到边距离1.223 m 的六边形子镜构成,组合口径达15 m,主镜折叠状态下每侧有两个旁翼,以适应直径8.4 m 的整流罩;由于LUVOIR-A 主次镜间距超过18 m,其次镜支撑在JWST 次镜基础上(包含驱动、铰链和闩锁机构)增加了额外的关节[7],如图3 所示。LUVOIR-B 采用离轴设计方案,主镜包含55 块边到边距离0.955 m 的六边形子镜,组合口径达8 m,主镜折叠状态下每侧有3 个旁翼,最大限度的使折叠主线趋于圆柱,以适应直径5 m 的整流罩[8]。LUVOIR-B 由于主次镜间距超过20 m,其次镜支撑采用了3 块折叠板形式的桁架结构,通过铰链、电机和闩锁机构实现展开和锁定,如图3 所示。
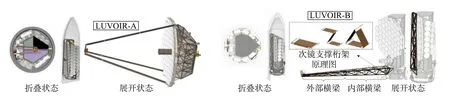
图3 LUVOIR 巡天望远镜Fig.3 The Large UV/Optic/Infrared Surveyor
(3)先进大口径空间望远镜
为了研究下一代天体物理学问题,NASA 规划了先进大口径空间望远镜(The Advanced Technology Large Aperture Space Telescope,ATLAST)科学实施方案,预计在2028 年前后发射。ATLAST 共包含3种设计理念,第一种为整体式,口径为8 m,后两种为分块式,口径分别为9.2 m 和16.8 m,均采用同轴光学设计方案,衍射极限在500 nm,望远镜组件在接近室温下工作。
ATLAST 方案的9.2 m 主镜包含36 块边到边距离1.315 m 的六边形子镜,集光面积达50 m2,采用了和JWST 相同的折叠方式,其中中央条带为18 块固定子镜,两翼对称分布9 块子镜,遮阳板采用4 个18 m 长的吊杆以十字形配置伸展,将薄膜展开[9],其折叠、展开和部署状态如图4 所示。ATLAST 方案的16.8 m 主镜包含36 块边到边2.4 m 的六边形子镜,呈三环状排列,计划使用混合可调分块镜并嵌入面形驱动器,以实现共相位调整;设计上与JWST 相比最大的区别是次镜要改为六角架支撑,以满足>10 Hz 的间隔频率[10],设计概念如图4 所示。
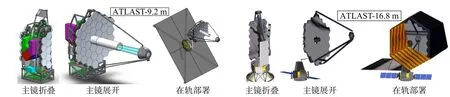
图4 ATLAST 设计概念演示Fig.4 ATLAST design concept
1.1.2 在轨组装空间光学望远镜
在轨组装空间光学望远镜是利用机器人/机械臂将多个分块子镜拼接在一起,拼接子镜可分一次或多次发射运输,在轨拼接成大口径空间望远镜,按主镜口径拼接大小分析如下。
(1)国际空间站上的光学测试和集成项目
NASA 提出在国际空间站上进行光学测试台和集成试验项目(Optical Testbed and Integration on ISS Experiment,OPTIIX),该项目采用轻量化、低成本、混合可调分块镜,利用机器人完成在轨组装,依靠波前传感与控制系统和激光束测量技术实现主动控制,确保图像质量达到并维持在衍射极限内。
OPTIIX 有效载荷是一台模块化望远镜,每个模块包含望远镜核心单元、三镜单元、次级塔单元、万向节单元。主镜由6 块边到边500 mm 的六边形分块镜组成,拼接口径为1.45 m,每个分块主镜由6 个刚体位移致动器实现分块镜的宏观调整,90 个嵌入式面形致动器实现分块镜的微观调整[11],望远镜构成单元及分块镜组件如图5 所示。

图5 OPTIIX 望远镜及构成单元Fig.5 OPTIIX telescope and components
(2)现代宇宙空间望远镜
现代宇宙空间望远镜(The Modern Universe Space Telescope,MUST)是美国Ball Aerospace 公司设计的一种在灵敏度和成像分辨率上都跨越新阈值的光学紫外望远镜,将在日地L2 点上实现机械臂在轨组装,拼接口径达10 m,集光面积50 m2以上,望远镜采用模块化接口设计,用于扩展未来科学任务。主次镜组件及装配过程如图6 所示。

图6 MUST 装配示意演示Fig.6 The assembly process of MUST
MUST 主镜采用“半刚性”的设计,包含16 个相同的分块镜组件,每个分块镜边长约2 m,16 个分块镜组件分布在以计量环中心为圆心的同心圆上,每个分块镜组件包含分块镜、相位调整机构及支撑背板,其中支撑背板靠近计量环一侧装有定位销和锁紧结构,对侧配有固定卡具,便于机械臂抓取[12];次镜组件包含反射镜、调整机构和支撑结构,其中支撑结构采用折叠腿设计,装配前折叠并固定于分配器上,在轨利用机械臂锁定到计量环上完成在轨装配。
(3)空间在轨组装望远镜项目
2018 年5 月,NASA 对在轨组装的价值和风险进行定量评估后,指出未来的空间望远镜要以机器人自主装配技术为核心前提,并将发射系统经济性纳入考虑,由此提出一种模块化空间在轨组装望远镜项目(in-Space Assembled Telescope,iSAT),该望远镜未来可扩展模块数量增大口径,可补给维修延长寿命,可用更先进的仪器代替有效载荷。该望远镜共携带5 台科学仪器,其中一台为用于探索类地行星的高性能日冕仪。iSAT 望远镜将搭载5 m 级整流罩运载火箭,分6 次发射,以航天器总线作为组装平台,借助监督式自主机械臂完成在轨装配,最终运行在日地L2 轨道。此望远镜采用离轴反射式光学设计,可在紫外/可见光/红外(UVOIR)波长下工作,主镜口径为20 m,包含24 个单元模块,每个单元包含7 个可调控分块镜组件,主镜支撑采用一种新型三桁架结构,见图7(a);为保证刚度要求,每个分块镜组件结构类似于夹层板设计,包含顶层、底层以及中心三角形。为便于模块组装,在节点位置增加了多螺母设计,针对三节点连接的模块接口,使用松脱螺栓预加载进行模块连接[13],如图7(b)所示。
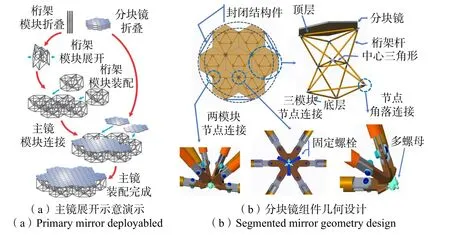
图7 iSAT 望远镜Fig.7 in-Space Assembled Telescope
1.2 国内研究现状
国内相关机构对分块光学载荷进行了一系列理论研究、初步设计以及试验验证,如主镜分块方式、定位支撑方式、可展开结构机构设计、形状记忆复合材料的释放机构研制以及关键技术验证等,相应的科研成果已成功应用于科研任务中,但主要集中于可展开光学载荷方面;在轨组装方面,尚处于起步阶段,多集中于理论研究,且以跟踪性研究为主,现阶段已开展了地面原理样机研制,用于攻关机器人在轨装配技术,并有望于今后5~10 年成功研制10 m 级空间望远镜,总的来看,与国外还有不小差距。
1.2.1 可展开方面
北京空间机电研究所陈晓丽等[14]对主镜分块的影响因素作了分析,提出了主镜分块的原则,并给出采用8 块扇形分块镜上下交错收拢,收拢直径小于2.8 m 的4 m 主镜分块方案,之后又提出了展开、定位和锁紧分开的精密展开机构方案,并通过缩比模型进行实验验证,得出展开机构的重复展开精度可达到0.05 mm 的实验结果[15];哈尔滨工业大学冷劲松团队[16]在基于形状记忆聚合物复合材料的释放机构研制方面做了大量研究,设计了弯曲构型的结构锁定机构并实现了工程化应用,同时针对展开同步性实现了进一步优化改进;梁论飞等[17]设计了一种空间望远镜展开机构地面实验系统,用于测试拼接主镜展开机构的重复定位精度,实验结果表明该系统可有效实现主镜机构的展开和收拢,且重复位移定位精度小于0.05 mm,姿态角度小于0.02°;吴松航等[18]对拼接主镜的主动定位技术、主动支撑技术和主动拼接技术作了总结分析,并从比刚度、可替换性、支撑材料属性及输出稳定性方面给出建议;中国科学院西安光学精密机械研究所胡斌等[19]针对可展开空间望远镜光机结构和热控方面涉及到的关键技术作了阐述,并对分块可展开对地观测望远镜和光轴方向可展开微纳卫星光学望远镜的研究现状作了分析;中国科学院西安光学精密机械研究所李旭鹏等[20]对大口径空间主反射镜拼接化结构技术作了分析,对所涉及的关键技术进行了归纳,总结了拼接化结构设计在拼接精度和面形精度两方面研究难点。
1.2.2 在轨组装方面
长春光学精密机械与物理研究所许博谦等[21]针对下一代10 m 级大口径空间望远镜的解决方案,给出了在轨组装望远镜技术的顶层设计思考,包含光学设计、分块主镜布局、模块化结构设计、在轨组装对接方法等方面,并预见了形如空间站的载人空间对未来在轨组装空间望远镜的重要作用。
哈尔滨工业大学蒋再男等[22]提出了一种10 m 口径的模块化望远镜设计概念,该望远镜计划使用具有环形移动底座和冗余可拉伸机械手的机器人进行组装,并在地面进行初步验证。望远镜采用同轴反射式光学设计,包含资源模块、主镜模块、次镜模块及次镜支撑模块,体积包络约为直径14.6 m×20 m。主镜包含60 个分块镜模块,模块组件分多次发射到达目标轨道。为满足轻量化和热稳定性要求,光学结构选用碳化硅材料,机械结构选用碳纤维复合材料和碳化硅铝基复合材料,望远镜概念如图8 所示。
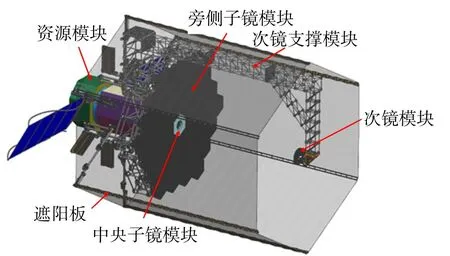
图8 10 m 口径望远镜概念Fig.8 Concept of a 10-meter aperture telescope
北京空间机电研究所开展了在轨组装望远镜的原理样机研制,用于验证波前传感与控制、机器人装配精度等关键技术;使用机械人智能精密装配系统完成分块主镜的装配,地面可实现装配测量精度优于0.1 mm,有望使机器人在轨实现分块镜的精确装配,机器人地面装配过程如图9 所示。

图9 机械人智能精密装配示意Fig.9 Sketch map of robot intelligent precidion assembly
此外,长春光学精密机械与物理研究所与俄罗斯科学院天文研究所[23]联合提出了一种集模块化设计、制造、装配于一体的紫外/红外空间望远镜设计概念,该望远镜携带了光谱范围115~1 100 nm 的轨道光谱仪,其空间分辨率至少0.1″,计划使用两个六自由度机器人在空间站附近的低轨道组装,日地L2 点运行,有望解决恒星动力学、星际环境光谱等多物理问题。主镜由36 个六边形模块组成,拼接口径为10 m,集光面积达61.1 m2,主动控制由波前测量和控制系统完成,以达到纳米级精度的相位要求。次镜支撑采用折叠桁架设计,以适应整流罩包络尺寸。望远镜模块可采用俄罗斯超重型火箭一次发射或长征火箭(CZ-5B)三次发射,如图10 所示。
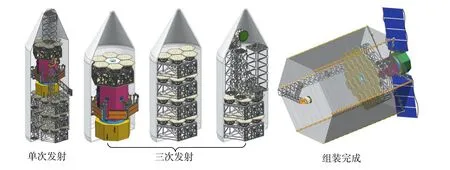
图10 OAST 望远镜发射状态与组装完成状态示意Fig.10 Schematic diagram of OAST launch status and assembly completion status
2 分块式空间望远镜的关键技术
当前分块式空间望远镜口径正向着10 m 量级发展,未来甚至有望向100 m 量级迈进,从宏观层面看,如此尺度的空间构架要突破整流罩的包络限制,需要高精度机构展开技术的强力支撑,在轨组装则要依靠机器人智能装配技术实现分块望远镜在轨建造;从微观层面看,波前检测与调控技术、超轻可调分块镜技术是分块镜实现在轨调整,稳定成像的技术保障,即在保证主镜面形精度的同时,实现大口径空间望远镜在轨部署,分块式空间望远镜技术实现路线如图11 所示。
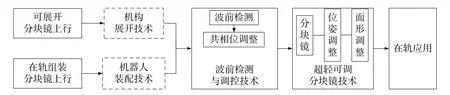
图11 分块式空间望远镜技术实现路线Fig.11 Technology roadmap of the segmented space telescope
2.1 高精度机构展开技术
分块式空间望远镜的机构展开技术涉及运动学、摩擦学、材料学等多学科领域。传统展开机构中的铰链会存在空行程、变刚度及滞后性等非线性特性,这些特性响应将作为直接输入,影响主镜展开机构的重复定位精度和稳定性,导致分块子镜的调整系统变得更为复杂。当前的展开机构,以JWST 主镜展开机构为代表,铰链销轴采用间隙配合的连接,锁定后销轴可以脱离载荷路径;锁定装置采用球面与平面配合的方式,使得接触区域为点接触,从而具有较好的重复展开精度和微动力稳定性,以满足空间环境所需的振动抑制能力[24]。针对可展开式空间望远镜,为满足机构所需的展开精度,可在充气式架臂、可展开桁架结构以及形状记忆复合材料等展开技术方面实现突破。机构展开相关技术见表2。

表2 机构展开相关技术Tab.2 Mechanism deployment related technology
2.2 机器人智能装配技术
面对未来多复杂、高精度的大口径分块望远镜,航天员手动装配已无法满足装配任务,使用机器人/机械臂装配具有经济性好、操作性强、可靠性高等优点。由于发射质量限制及大口径光学载荷装配需求,机器人设计要进一步轻质化;对精度要求较高的分块镜执行抓取、搬运和固定等操作,其末端执行器应具备精细力触融合的操作能力;对于复杂状况的空间装配,在视觉条件较差的情况下,装配时可能会出现分块镜之间的相互碰撞,机器人应具备多源融合的感知和测量能力,同时应开发柔性体机械臂的操作能力,以保证毫米级装配精度;对于大型结构的在轨装配,可能会采取分布式多机器人或多臂协同操作的工作模式。针对在轨组装空间望远镜,为实现在轨高精度、高稳定性操作,需要智能化的机器人/机械臂系统,机器人/机械臂相关技术见表3。
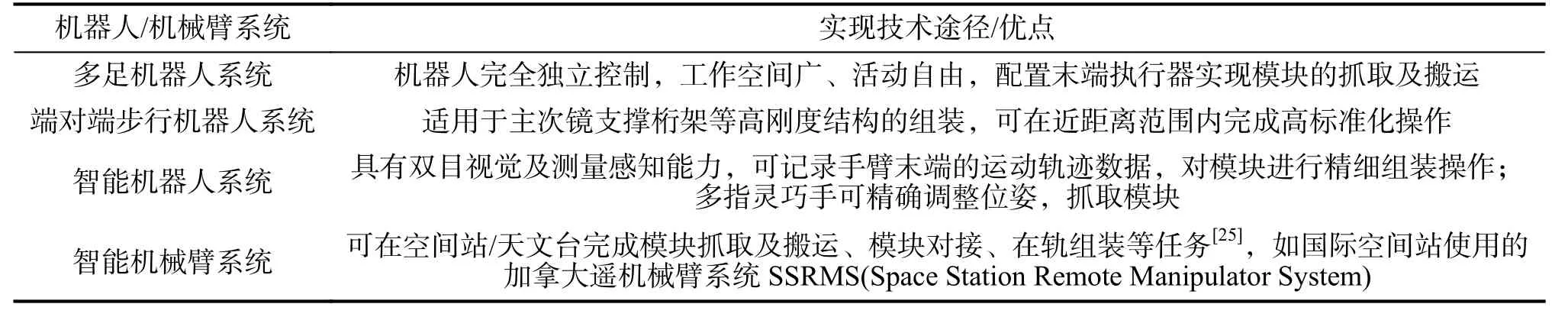
表3 机器人/机械臂相关技术Tab.3 Robot and robotic arms related technology
2.3 波前检测与调控技术
分块式空间望远镜在轨展开/组装完成后,由于展开机构和机器人装配误差的存在,分块镜之间会有拼接误差,这将导致光学系统出瞳处子波面沿光轴方向错位,使出瞳处不再是一个理想的平面波,直接影响成像质量,因此需要对拼接主镜进行共相位检测,利用分块镜背部的致动器,对其Piston/Tip-tilt 误差进行校正,使拼接主镜由毫米级装配精度调整到λ/30(均方根)的光学成像精度。分块望远镜的共相位检测方法及波前检测与调控技术路线如表4 及图12 所示。
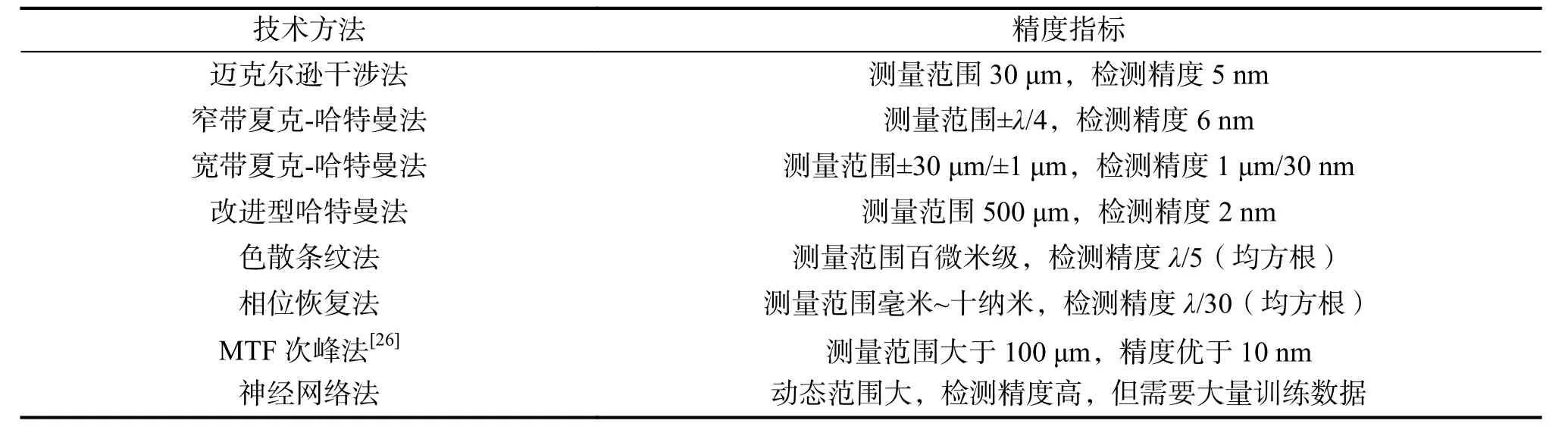
表4 共相位检测方法Tab.4 Co-phase detection method
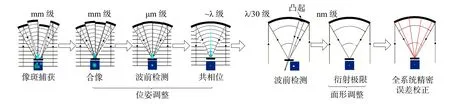
图12 波前检测与调控技术路线Fig.12 The technical route of wavefront sensing and control
2.4 超轻可调分块镜技术
分块式望远镜口径不断增大,这要求分块镜需进行超轻量化设计,而轻量化主要体现在反射镜面密度上,比如在SiC 基底上(面板支撑结构)溅射多层金属箔,形成纳米复合面板,使反射镜面密度逐步轻量化。分块镜调整从单自由度逐步发展到六自由度,分块形式以正六边形为主,因六边形具有中心对称性、机械结构稳定性强且填充率高、扩展性好、调控能力强,比如JWST 所用铍分块镜,背部使用了7 个低温纳米致动器,其中中心致动器用于曲率调整,其余6 个负责位姿调整,该致动器可在21 mm 的有效行程内实现7 nm 的输出精度[27],进而实现分块镜的位姿和曲率的精细调整。相比于JWST 红外谱段而言,可见光谱段的分块镜调整需要分辨率更高的致动器。美国喷气推进实验室指出下一代大口径望远镜关键技术中计划采用混合可调反射镜技术(Actuated Hybrid Mirrors)[28],比如在SiC 基体上植入固态驱动器或在ULE 面板上增加力驱动器,利用纳米致动器、曲率调整技术实现分块镜调控,该技术不仅满足上行发射力学环境,也具备足够的面形校正能力。AHM 反射镜组成如图13 所示。

图13 AHM 反射镜组成Fig.13 Components of Actuated Hybrid Mirror
对于可展开和在轨组装望远镜,分块镜都必须具备主动调控能力,宏观上涉及到多种调整机构,微观上主要以驱动技术实现,相关详细技术如表5 所示。

表5 分块镜调控相关技术Tab.5 Segmented-mirror control related technology
3 分块式空间望远镜未来技术发展与展望
大口径空间光学载荷已成为世界各国的主流发展方向。从总的趋势来看,采用整体式建造的望远镜口径极限在8~10 m 以内,采用分块展开式建造的望远镜其口径极限为20 m 左右,采用在轨组装式建造的望远镜不受口径制约,可广泛用于10~100 m 甚至更大尺寸的空间光学望远镜。伴随着未来技术发展趋势,大口径空间光学望远镜还应在以下方面实现技术突破。
1)针对高精度展开机构方面,需在大型光机结构超高稳定性技术上实现突破,在适应空间热稳定性要求的同时,具备高效微振动抑制能力,以满足大口径望远镜成像超稳要求;
2)针对机器人/机械臂智能组装方面,需在基于融合感知高精密自主装配技术上实现突破,面对大范围的装配作业,机器人/机械臂应具备全局感知能力,并借助于多源数据融合实现高效率在轨装配;
3)针对波前检测与调控技术方面,需在波前检测与智能调控技术上实现突破,面对不断增大的望远镜系统,应借助于智能深度学习建立波前多数据关系,实现分块镜高效率快速调控;
4)针对超轻可调控分块镜技术方面,需在分块镜模块准无应力支撑技术上实现突破,基于六自由度调控技术实现分块镜高精度调控。
面向未来远景目标,分块式空间望远镜还应在高精度全镜面精确对接与锁定技术、分块镜模块化构型与在轨变构技术、空间望远镜大型结构在轨增材制造技术等方面实现有益增值。
4 结束语
分块式空间望远镜是未来部署大口径空间光学载荷的重要途径,在工程化需求的强力牵引下,未来的空间望远镜系统势必会向着10 m 甚至100 m 量级迈进。本文对分块式空间望远镜技术发展现状进行了梳理,对涉及到的关键技术进行了分析,明确了分块式空间望远镜未来发展的技术难点。通过对可展开和在轨组装实现技术的总结,希望对今后的科学研究和技术路线规划提供有益参考。