一种虚拟同步发电机自适应阻尼补偿方法
2024-03-21龚仁喜黎洛琦王奇
龚仁喜,黎洛琦,王奇
(广西大学 电气工程学院,南宁,530004)
0 引 言
近年来,由于各国对能源需求的不断增加,以电力电子变换器为接口与公共电网并网的分布式发电(DGs)得到了迅猛的发展[1]。传统的DGs,其控制方式主要包括电流控制和恒压恒频控制,这两种方式都会遇到两大难题[2-3]:一是静态变换器不具备同步发电机(SG)所具有的惯性,很难建立一个仅适用DGs的系统;二是难以做到对电压及频率进行精准控制,并网难度大,负荷共享困难。为了解决这两大难题,有学者提出了虚拟同步发电机(virtual synchronous generators,VSG)的概念[4-9]。VSG控制技术具有明显优于传统DGs技术的控制性能和频率稳定性,其产生的虚拟惯量能很好地解决DGs的其它相关问题,具有较广阔的应用前景。
由于VSG是对电网中的同步发电机进行模拟,因此也继承了同步发电机的缺陷[10],如传统同步发电机的机电暂态振荡等问题。所以,如何利用虚拟同步发电机控制参数调节灵活的优点突破传统同步发电机的局限性成为当前研究的热点之一[11-12]。阻尼系数作为VSG的重要参数,一直是研究中关注的重点。文献[13]以构建最优阻尼比为目标,提出了一种VSG控制策略,但没有考虑系统电感和励磁调节器产生的负阻尼效应对系统的影响。文献[14]分析了大虚拟惯量造成的功率振荡现象,并提出了通过增大阻尼系数解决振荡问题的方法,但没有考虑到阻尼变化对系统功率超调和调整时间的影响。文献[15]详细分析了虚拟惯量对VSG系统的影响,并提出了“负虚拟惯量”的概念,但没有考虑采用负惯量后虚拟阻尼的设计问题。自适应控制作为非线性系统的重要控制手段,在VSG中也得到了很好的应用。文献[16]提出了一种转子惯量自适应控制方法,但控制方法过于依赖调节系数的选择,极易造成系统不稳定。文献[17]提出了一种基于综合控制算法的自适应惯量阻尼综合控制以增强控制的精确度的方法,但该方法复杂且限制条件较多。此外,部分学者还对系统阻尼进行了一系列研究,但是对系统电感增大所产生的等效负阻尼问题的研究较少。文献[18]分析了VSG系统线路电感和励磁调节系数产生的负阻尼特性,并采用虚拟阻抗法补偿线路电感的负阻尼,然而采用虚拟阻抗法补偿线路电感的负阻尼会增大系统的阻性成分,增加系统的耦合程度[19-20],降低系统的电能质量。
针对系统电感对虚拟同步发电机控制系统存在等效负阻尼效应的问题,文章提出了一种自适应阻尼补偿方法。首先,基于虚拟同步发电机控制技术,通过dq变换和小信号分析法建立系统的动态电磁方程和小信号模型。然后利用电磁转矩偏差分解出同步力矩系数和等效阻尼系数。最后通过分析等效负阻尼的产生机制,在有功-频率调节器中加入以系统频率、虚拟阻抗为自适应控制变量的阻尼补偿模块,实现对虚拟同步发电机阻尼的自适应补偿。MATLAB/Simulink仿真表明,文章方法与基于传统的VSG控制及基于虚拟阻抗补偿的方法比较,具有更强的稳定性和快速性,从而验证了所提出方法的有效性。
1 虚拟同步发电机的动态数学模型
1.1 考虑电感磁链的虚拟同步发电机动态矢量模型
根据基尔霍夫定律,虚拟同步发电机的电磁方程可表示为:
(1)
其中eabc、uabc和iabc分别为VSG的内电势、机端三相电压和电流,R和L为系统等效电阻和等效电感。
根据三相-两相变换定理,可得两相静止坐标系下的动态电磁方程为:
(2)
由两相静止坐标系转换为同步旋转坐标系公式
(3)
可得
(4)
其中X表示系统等效电抗,X=ωL;电感磁链λdq=Lidq。可以看出,当忽略电感磁链动态过程dλdq/dt时即为同步发电机的经典矢量模型。
1.2 虚拟同步发电机的动态小信号模型
假定dq坐标系下输出电压为:
(5)
其中,δ为虚拟同步发电机系统的功角。则由式(4)、式(5)可得虚拟同步发电机输出电流:
(6)
由小信号分析法可得id、iq的偏差值:
(7)
其中
(8)
2 虚拟同步发电机系统功率耦合机理及等效负阻尼分析
2.1 虚拟同步发电机系统功率耦合机理分析
虚拟同步发电机输出功率可表示为:
(9)
其中,Z为系统等效阻抗,α为阻抗角。
由式(9)可以看出,当系统呈感性时,可降低系统有功损耗,提高系统的传输效率。式(9)可简化为:
(10)
可见,当系统近似呈感性时,输出有功功率只与频率有关,输出无功功率只与电压有关,虚拟同步发电机系统功率近似解耦。这不但降低了系统的复杂性,也提高了系统的稳定性。基于虚拟同步发电机功率耦合机理,低压微网作为虚拟同步发电机的常用场合,输电线路一般呈阻感性。为提高系统的感性成分,文中所提出的虚拟同步发电机系统等效负阻尼补偿方法考虑了系统的功率耦合机理和虚拟阻抗解耦策略。系统虚拟阻抗等效原理如图1所示。
2.2 系统电感的等效负阻尼效应分析
由于虚拟励磁器的负阻尼效应可以采用虚拟PSS装置补偿[19],忽略虚拟励磁器的作用,即ΔE=0,再根据式(9)和瞬时功率理论Pe=1.5(edid+eqiq)可得有功功率的小信号分析模型:
(11)
由CTC法可知,令VSG在轴系产生某一频率正弦扰动,可分别求出机械部分和电气部分的转矩对扰动的影响。对电磁力矩扰动ΔTe进行分解得同步力矩系数ke和等效阻尼系数De:设Δδ为系统正弦扰动,角速度为Ω,可得Δω=sΔδ=jΩΔδ,有:
(12)
其中等效阻尼系数De为:
De=
(13)
由式(13)可以看出,等效阻尼系数大小与系统参数有关。系统实际阻尼为
D=Dref+De
(14)
其中Dref为控制回路中阻尼系数设定值。由于在虚拟同步发电机系统中,功角较小,De一般情况下为负数,也就出现了等效负阻尼效应。如若角速度Ω近似为系统运行角频率,那么在其他参数稳定的情况下,等效负阻尼效应程度将随着系统电感的增大而增大。当|De|>Dref时,会影响系统的稳定性。
设定系统电阻R=0.5 Ω,内电势幅值E0=312 V,输出电压幅值U=311 V,功角初始值δ0=0.1 rad,代入式(13),可得出系统电感对等效负阻尼系数的影响如图2所示。

图2 系统电感对等效负阻尼系数的影响
当系统的电感不变,改变系统电阻,可得不同电阻下等效阻尼系数随角速度的变化曲线,如图3所示。从图3可以看出,当系统运行角速度等于同步频率时,系统的等效阻尼系数取得极值,容易产生同步谐振现象(synchronous frequency resonance,SFR),系统电阻增大能抑制等效负阻尼效应,但由功率耦合机理可知,系统电阻增大会对VSG解耦造成不利影响。

图3 不同电阻下等效阻尼系数随角速度变化曲线
从上述分析可知,通过虚拟阻抗控制增大系统阻性成分或降低系统感性成分可以抑制系统电感所产生的负阻尼特性。然而,若考虑系统耦合对虚拟同步发电机系统产生的影响时,无论是增大虚拟电阻还是降低虚拟电抗,均会增大虚拟同步发电机系统的功率耦合效应,增大了系统的复杂程度,并影响系统的稳定性。针对以上情况,文中提出一种自适应阻尼补偿方法以解决等效负阻尼效应问题。
3 自适应阻尼补偿方法
由图1可知,当加入虚拟阻抗控制后,根据虚拟阻抗控制原理,系统等效阻抗和其对应阻抗角分别为:
(15)
其中,Ra和La分别对应虚拟电阻值和虚拟电感值。
考虑到虚拟同步发电机的功率耦合机理,补偿系统电感所产生的等效负阻尼不应该通过虚拟阻抗控制来实现。文章利用虚拟同步发电机控制参数调节灵活的特点,在有功-频率调节器中增加虚拟同步发电机自适应阻尼补偿模块。图4为改进后虚拟同步发电机系统整体控制结构图。

图4 加入自适应阻尼补偿模块后虚拟同步发电机系统整体控制结构
其中,Lv和Cv分别为虚拟同步发电机的输出滤波电感和滤波电容;Rline和Lline分别为线路电阻和电感;φ为系统相角;PCC为系统的公共耦合点;DER为等效分布式发电直流母线电压。
由于虚拟同步发电机系统的线路阻抗在实际应用中数值不变,需要通过调节虚拟阻抗来改变系统的同步阻抗以达到改变系统阻抗成分的目的。因此本设计的自适应阻尼补偿器以系统运行角频率、虚拟电阻以及虚拟电感作为自适应补偿器的控制变量,通过式(13)构建模型得出系统等效阻尼系数,并通过绝对值后补偿到系统阻尼系数中,如图5所示。

图5 含自适应阻尼补偿模块的虚拟同步发电机有功-频率控制框图
可以发现,采用自适应阻尼补偿的方法充分利用了虚拟同步发电机系统控制参数调节灵活的特点,不仅补偿了系统线路阻抗所产生的等效负阻尼效应,还能通过反馈虚拟阻抗参数,以自适应的方式补偿虚拟阻抗改变所产生的等效负阻尼特性。这不仅提高了系统的响应速度,而且不影响虚拟同步发电机系统的解耦策略。除此之外,由于自适应阻尼补偿法还考虑了虚拟阻抗值,所以对于采用动态虚拟阻抗控制策略的控制系统(虚拟电阻和虚拟电感随着系统状态的变化而改变),该方法依然适用。
4 仿真验证
为了验证方法的有效性和优越性,考查比较了基于传统虚拟同步发电机控制、基于虚拟阻抗法补偿和基于本方法所的结果。首先,在MATLAB/Simulink环境下搭建了一台18 kV·A的虚拟同步发电机控制系统模型,其仿真系统模型参数如表1所示。

表1 VSG系统参数
设定虚拟同步发电机运行初始状态带10 kW有功负载,在0.3 s—0.6 s时加入5 kW有功和3 kvar无功负荷。通过与传统虚拟同步发电机系统对比,验证文章方法的有效性。
从图6(a)可以看出,基于本方法的VSG系统有功功率启动时收敛速度更快,同时系统的稳定性更高。而从图6(b)、图6(c)可以看出,传统VSG控制增大了负载产生的振荡现象。采用本方法的VSG系统能更好地抑制有功振荡,而当负载减小时,自适应阻尼补偿后具有更好的快速性,验证了该方法的有效性。
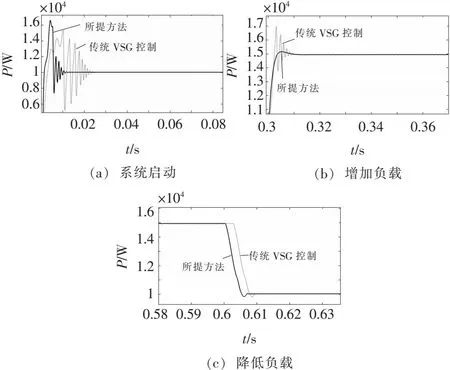
图6 所提方法与传统VSG控制方法控制效果的比较
图7比较了基于所提方法和基于虚拟阻抗控制方法的控制效果(其中设定的虚拟阻抗Ra=0;La=-L),从图中可以看出,本方法的控制效果显著优于后者,从而验证了所提方法的优越性。

图7 所提方法与虚拟阻抗控制方法控制效果的比较
另外从图7还可以看出:由于虚拟阻抗控制导致VSG系统的功率耦合程度增大,系统输出的有功出现振荡,相对稳定性降低。在负载减小时,采用文中所提方法的控制系统比采用虚拟阻抗控制的系统响应速度更快,表现出更好的快速性,进一步验证了所提方法的优越性。
5 结束语
由于虚拟同步发电机系统的线路存在等效负阻尼效应问题,容易导致系统阻尼设置不精确,从而产生功率振荡等稳定性问题。文章在考虑虚拟同步发电机系统功率耦合机理的情况下,以系统角频率、虚拟电阻以及虚拟电感作为自适应变量,提出了一种自适应阻尼补偿方法。实验表明,采用文中所提自适应阻尼补偿方法的虚拟同步发电机控制系统,比传统虚拟同步发电机系统以及采用虚拟阻抗控制方法的系统具有更好的收敛性和响应速度,同时考虑到了虚拟阻抗所产生的负阻尼特性,使补偿更加精确。另外,所提方法不影响系统的功率解耦策略,使该方法更具优越性。
