面向6G 的基于通信感知一体化的超可靠低时延通信及雷达感知*
2024-03-20李延富苏成杰丁昌峰
李延富,苏成杰,丁昌峰
(1.中煤科工集团沈阳研究院有限公司,辽宁 抚顺 113122;2.煤矿安全技术国家重点实验室,辽宁 抚顺 113122;3.南京邮电大学,江苏 南京 210003)
0 引言
由于频谱资源逐步向高频段迁移及无线通信与雷达感知在硬件平台和信号处理上的相似性,通信与感知一体化技术(Integrated Sensing and Communication,ISAC)吸引了研究人员的广泛关注。ISAC 技术的目标是在相同的硬件平台、无线频谱和信号波形上,同时实现无线通信与雷达感知,从而丰富无线的功能[1]。根据已有的研究,ISAC 系统能够满足无线通信与雷达感知的性能需求,具有很好的应用前景。国际电信联盟(International Telecommunication Union,ITU)已将ISAC 作为6G的典型应用场景发布在《IMT 面向2030 及未来发展的框架和总体目标建议书》中。因此,ISAC 有望实现广泛的应用,并解决日常生活及工业生产中的诸多问题。
目前,关于ISAC 的研究较多,且集中于通信和感知预编码设计、通信和感知的性能折衷,以及多种ISAC 的应用场景。文献[2]研究了在雷达和通信共存的基站上利用通信信号进行雷达感知功能的方案。为了实现更多的空间自由度,文献[3]提出了将雷达波形与通信信号分别进行预编码,然后共享使用发射天线阵列的发送器架构。文献[4]提出了单个ISAC 设备下的雷达-通信波束赋形方案,并且考虑了雷达-通信共享天线阵列和雷达-通信分别使用不同的天线阵列这两种方案。文献[5]研究了多输入多输出(Multiple-Input Multiple-Output,MIMO)雷达和多用户MIMO 通信下的联合收发器波束赋形设计,并对MIMO 雷达和多用户MIMO 通信之间的性能折衷进行了分析。文献[6]研究赋予Wi-Fi 信号进行感知的能力,从而为智能家居服务。文献[7]考虑了ISAC 系统中的物理层安全通信问题,并提出利用人造噪声和波束赋形方法最大化合法用户的接收信噪比。
近年来,无人驾驶技术、无人机技术及工业自动化等新兴应用都对通信的可靠性与时延提出了更高的要求。而在5G 通信技术中,一项关键的应用技术是超可靠低时延(Ultra-Reliable Low-Latency Communication,URLLC)技术[8]。URLLC 是一种能够在严格的要求下传输数据包的服务,尤其是针对可用性、时延和可靠性要求比较高的应用。因此,利用URLLC 技术可以实现一些对时延和可靠性要求较高的应用,如自动化控制和物联网等。URLLC的要求通常是将很小的数据包(32~200 字节)在1 ms 时延及差错概率低于10-5的情况下进行传输。这样严格的要求使得实现URLLC 成为一项具有挑战性的工作。文献[9]提出了一种基站下行URLLC传输下的资源分配和波束赋形设计。文献[10]提出了一种统计复用队列模型,以减少URLLC 服务质量约束下所需要的总带宽并确保队列时延。文献[11]考虑了两种典型的5G 服务,即云无线接入网络中的增强移动宽带和URLLC,并考虑利用网络切片技术实现服务复用和收益最大化。
随着无线网络的发展,传统的只有单一通信功能的网络越来越不能满足未来网络的需求,新兴的应用要求未来网络能对周围环境进行感知,能“看”到现实世界,如车辆自动驾驶、无人机和智能机器人等[12]。而随着大规模天线阵列及信号处理技术的发展,在相同的硬件设备上同时实现通信与雷达感知已成为可能。因此,未来大量的设备都将拥有无线感知功能,尤其是无人机和智能辅助驾驶设备,它们都依赖雷达感知进行距离探测及障碍物等的检测。与此同时,这些设备需要高可靠的无线通信链路,以及时对设备进行可靠控制,或传递出感知结果等重要数据信息,从而快速做出响应。因此,为了实现高可靠低时延的无线传输,URLLC 技术已被考虑应用到无人机和车载物联网中[13-14]。此外,雷达感知与URLLC 功能对未来网络中的一些应用是非常重要的,那么将ISAC 技术与URLLC 技术相融合是非常值得注意的。相应地,如何同时设计ISAC 与URLLC 也是一个值得研究的问题。
根据上面的讨论,本文考虑研究基于ISAC 的URLLC 系统,在基站与用户设备进行下行短包通信的同时进行雷达目标的感知。然后,提出了用户设备的和速率最大化问题,并确保雷达感知的性能要求,同时优化雷达和URLLC 的波束赋形。仿真结果表明,本文提出的架构与算法能够很好地满足雷达感知与URLLC 需求。
1 系统模型和问题建模
如图1 所示,系统由一个ISAC 基站与K个用户设备(User Device,UD)组成,且用户设备的集合可以表示为K={1,2,…,K}。ISAC 基站有M根天线,用户设备则是单天线。
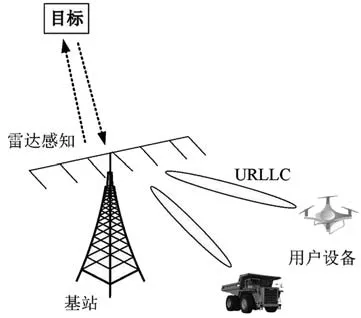
图1 多用户终端雷达感知和通信融合网络
1.1 基站的传输信号模型
为了获得更多的空间自由度,这里采用与文献[3]、文献[5]、文献[15]中相同的基于多波束的通信与雷达共享的发送器,其结构如图2 所示。在图2 中,通信信号和雷达波形是单独进行预编码的,且传输信号是通信符号和雷达波形的叠加信号。这样通信符号和雷达波形就可以在相同的时间和频谱上进行传输,且共享发送天线阵列。基站发送的信号x[n]是分别预编码的通信符号与雷达波形的叠加,其可以表示为:
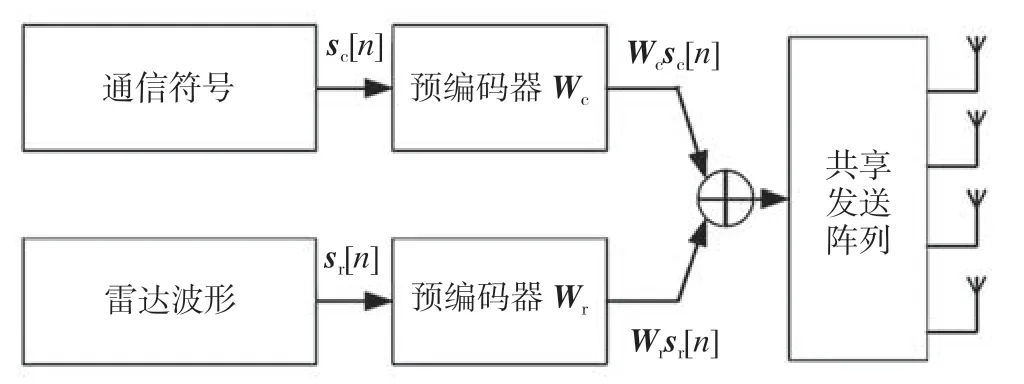
图2 通信和雷达单独预编码的联合发送器
式中:sr[n]=(sr,1[n],…,sr,M[n])T∈CM×1表示基站第M根天线上发送的雷达波形,Wr∈CM×M表示雷达波形的预编码矩阵,sc[n]=(sc,1[n],…,sc,K[n])T是K个并行的通信符号,Wc=[wc,1,…,wc,K]∈CM×K表示通信符号的预编码矩阵。与文献[3]相似,这里的通信符号与雷达波形有如下假设。
(1)UD 的通信符号是相互独立的,并且具有零均值和单位功率,因此有
(2)UD 的通信符号之间是不相关的,并且与雷达波形是统计独立的,因此对 ∀k,l∈K有:
(3)使用随机雷达波形和伪随机编码,雷达波形之间可以是不相关的并且相互正交,即E(sr[n]·srH[n])=IM。
在上面的假设中,通信信号一般是零均值的广义平稳过程,较容易得到。另外,随机雷达波形指的是雷达波形编码和雷达波形调制,比如二进制相位编码波形、随机雷达波形的线性频率调制和随机幅度调制[16-17]。相比于确定性雷达波形,随机雷达波形具有低检测概率、低截获概率及较低的共信道干扰等优点,且随机波形又是广义平稳的[17]。因此,上面关于通信符号和雷达波形的假设是可以实现的。
根据式(1)可以得知,基站同时使用通信信号和雷达波形进行目标感知,可以在提供更多的空间自由度的同时,确保雷达和通信的性能表现。相应地,发送信号的协方差矩阵可以表示为:
1.2 雷达感知模型
根据式(1),ISAC 基站发送的信号是通信信号与雷达波形的叠加信号,并且基站对通信信号完美已知。因此,在基站侧的雷达接收器就可以通过信号处理技术完全去除通信信号,那么通信信号就不会产生干扰。因此,根据文献[4]和文献[5]中的雷达目标模型,如果基站在时隙n时监测的目标在θ0方向,那么基站接收到的雷达回波信号可以表示为:
式中:α0为基站与目标之间的复数路径损耗;表示发送接收引导矩阵,其中,aR(θ0)和aT(θ0)分别是接收和发送阵列引导向量。由于使用了ISAC 技术和共享的天线阵列,因此有aR(θ0)=aT(θ0),且aT(θ0)可以表示为aT(θ0)=,其中d和λ分别表示天线间距和信号波长。c[n]∈CM×1表示杂波信号,且其方差为Rc。zr[n]∈CM×1表示均值为0、方差为的加性高斯白噪声信号。
由于单一的点状目标是处于远场的,因此可以假设路损因子α0对于所有发送和接收天线阵元是相同的,以方便上面信号模型的处理[18]。在式(4)中,杂波信号c[n]主要有信号独立与信号依赖两种类型[5]。信号独立的杂波信号的协方差矩阵为Rc,且可以视为常数。而信号依赖的杂波信号则依赖于基站发出的信号,可以建模为:
式(5)表示有I个杂波信号,且第i个杂波信号的方向在θi,路径损耗因子为αi。根据文献[19]和文献[20],可以假设每个雷达目标的反射系数与杂波反射系数是独立的复高斯变量,并且有αi~CN(0,σi2),i=0,1,…,I。因此,式(5)中信号依赖类型的杂波信号的协方差矩阵可以表示为:
根据上面的模型,基站侧雷达接收器的信号与杂波和噪声比(Signal-to-Clutter and Noise Ratio,SCNR)可以表示为:
1.3 基站超可靠低时延通信模型
由于新兴业务的需求增长,基站与UD 的通信需要很高的可靠性与低时延,且基站与UD 之间的通信大多以调度、控制和警报信息为主,发送的信息比特数目较少,因此利用URLLC 可以很好地实现上述需求。根据式(1)中的信号模型及MIMO预编码方法,UDk(k∈K)接收到的基站信号可以表示为:
根据式(8),UDk接收到的通信信号的信号与干扰和噪声的比值可以表示为:
另外,由于基站与UD 之间利用URLLC 进行数据传输,传送的数据包是短包,传统的香农公式已不能反映可达速率与传输差错概率之间的关系。而且,基于URLLC 的可达速率属于有限块长领域[21]。在数学上,UDk在差错概率为ε>0 及编码块长为nc的情况下,其可达速率(奈特/秒/赫兹)可以表示为:
通常,在通信方面的衡量指标主要有频谱效率、能量效率及用户公平性。对URLLC 的要求则是在传输较小的数据负载(32 字节到200 字节)时,用户面的时延要达到1 ms,并且中断概率要低于10-5。因此,在给定差错概率的情况下,高速的传输速率对低传输时延非常重要。
1.4 问题建模
根据上面的分析,ISAC 基站同时具有雷达感知与URLLC 功能,因此需要满足这两项功能的性能要求。由于基站的主要功能是服务UD 的通信需求,雷达感知功能则是利用ISAC 技术对雷达目标进行感知;因此,和大部分已有研究类似,本文的目的是最大化所有UD 在URLLC 下的和速率,以减少短包数据的传输时延[9]。与此同时,对于雷达感知,雷达信号的SCNR 对于雷达感知的精度与准确性具有重要的决定性作用,因此雷达SCNR 也被频繁用作设计指标[5,22]。相应地,本文也考虑利用雷达SCNR 来衡量雷达的性能要求。根据上面的讨论,本文的优化问题可以表示为:
式中:约束C1 表示基站的总传输功率需要低于最大功率pmax,约束C2 表示雷达SCNR 需要大于设定的阈值γmin,以满足雷达的检测要求。
由于变量的耦合与复杂表达式的存在,问题(12)很明显是一个非凸优化问题,且难以求解。具体来说,问题(12)的非凸性主要是由复杂的目标函数和约束C2 导致的;因此本文将分别对它们进行处理。
2 算法设计
本节首先对问题(12)中的目标函数进行转换和近似,其次处理约束条件C2。
2.1 目标函数的处理
从式(10)可以看出,目标函数中的rk由组成,而本文的目标是将rk转换为一个关于变量的凹函数。为了方便分析,这里令fk(Wr,Wc)=ln(1+γc,k),以及那么,接下来可以分别对fk(Wr,Wc)和gk(Wr,Wc)进行处理。
2.1.1 fk(Wr,Wc)的变换
首先,fk(Wr,Wc)是一个复杂的对数函数,考虑使用基于二次变换的拉格朗日对偶函数来进行变换[23],变换结果可以表示为:
式中:λk表示辅助变量。但是,式(13)的最后一项仍然是复杂且非凸的。因此,在将多维二次变换应用到式(13)后,可以进一步将式(13)转换为:
式中:s(λk)=log(1+λk)-λk,yk为引入的辅助变量。由于范数是凸的,且是仿射的,因此fk(Wr,Wc)关于变量Wr和Wc是凹函数。
当给定Wr和Wc时,最优的辅助变量和可以分别按下面的式子进行更新:
2.1.2 gk(Wr,Wc)的变换
gk(Wr,Wc)由于复杂的表示式而难以处理。为了方便分析,首先定义:
其次,利用二次变换,γc,k(Wr,Wc)可以被等价转换为:
式中:ck表示辅助变量。在给定Wr和Wc时,按下式进行更新:
从式(20)可以看出,它是两个凸函数相减的形式,因此可以利用一阶泰勒展开的方法对ξk(Wr,Wc)进行处理,并且可以得到如下不等式:
根据上面的结果,gk(Wr,Wc)可以近似为如下的凸函数:
2.2 约束条件C2 的处理
首先,约束C2 可以等价转换为:
可以看出,式(25)也是两个凸函数相减的形式,因此也可以采用一阶泰勒展开的方法进行处理。令,那么φ(Wr,Wc)可以近似为如下的表达式:
现在,约束C2 已被转换成凸约束条件(27)。
2.3 整体优化算法设计
根据2.1 节的分析,以及式(14)和式(24)的结果,式(10)可以被转换为一个凹函数(Wr,Wc),并且可以表示为:
另外,根据2.2 节对约束条件C2 转换的结果,优化问题(12)可以表示为:
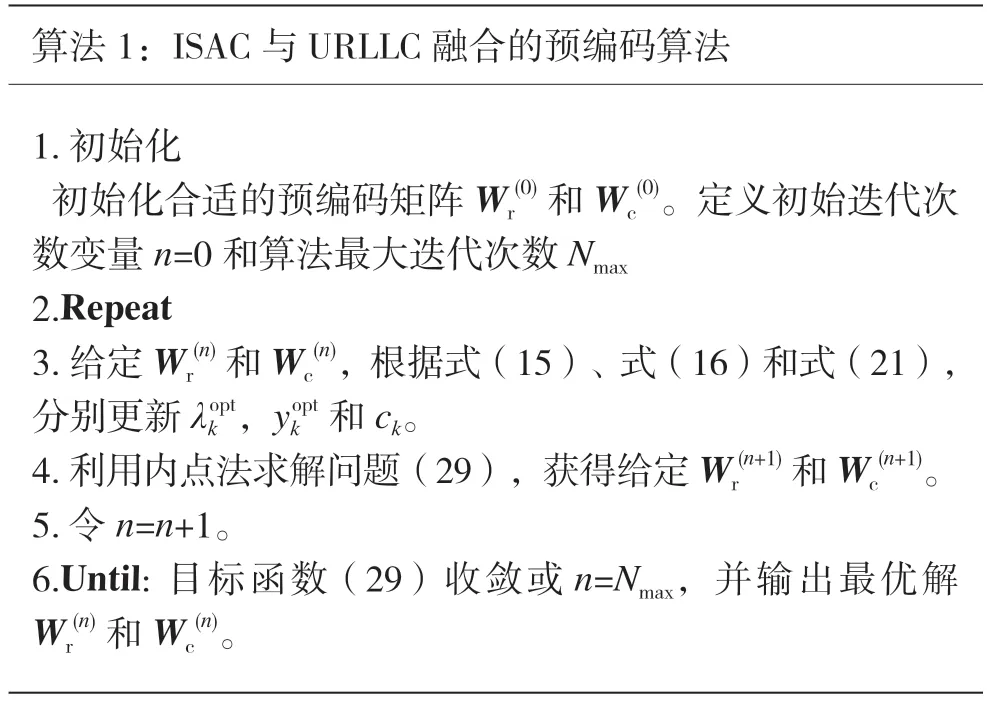
现在,问题(29)关于Wr和Wc是凸的,并且可以利用内点法进行高效的求解,解决问题(29)的整体优化算法如算法1 所示。
3 仿真分析
本节通过计算机仿真对设计的系统性能进行评估,具有ISAC 功能的BS 和UD 都安装了均匀线性阵列且阵列元素按半波长布置。UD 是随机分布的,且具有零均值和单位方差的Rayleigh 衰落。仿真中采用了3GPP 的路损模型,并表示为PLdB=148.1+37.6log10lkdB,其中lkkm 表示UDk与BS 之间的距离。背景噪声密度可以设置为-175 dB/Hz。除非特别说明,一些系统参数设置为K=4,pmax=1.5 W,γmin=20 dB。对于URLLC,令nc=168 和ε=10-5。雷达目标的方向角度θ0=0°,杂波数目I=2,杂波的方向分别为θ1=-60°和θ2=60°。另外,,并且
如图3 所示,对算法在不同发射功率与雷达SCNR 阈值参数设置下的收敛性进行了验证。从图中可以看出,算法在经过大概7 次迭代后就可以实现收敛,收敛速度较快。从图3 可以看出,当基站的最大传输功率增加时,所获得的UD 的和速率也有相应的增长,这是因为增大传输功率能够提升获得的信噪比,从而提升传输速率。另外,当增大雷达的SCNR 阈值时,系统的和速率也有相应的增加,这是因为雷达SCNR 主要依赖于传输协方差矩阵,而传输协方差矩阵与功率密切关联,因此提高了SCNR 阈值,相当于提高了对传输功率的要求。基站就会利用更多的传输功率进行传输,从而提升了UD 的传输速率。
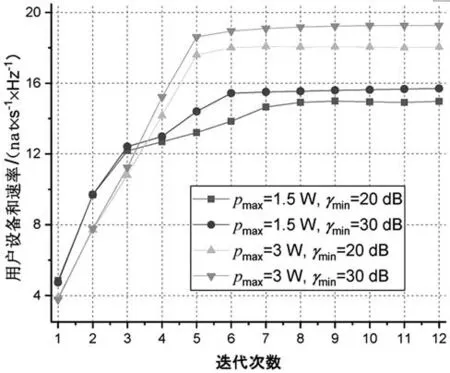
图3 算法1 收敛性验证
如图4 所示,本文研究了雷达波束模式与雷达SCNR 阈值γmin之间的关系。从图中可以看出,在目标方向0°处,雷达波束模式在不同的γmin值下都具有较高的值,且波束模式的值差别比较小。与此同时,不同的γmin值对杂波信号的抑制能力则显著不同。可以看出,更高的γmin值,如γmin=30 dB,对杂波的抑制能力最强,即在杂波方向上(-60°和60°)的雷达波束模式最低,能够很好地减少杂波信号的干扰。从图中可以看出,随着γmin的减小,杂波方向上的雷达波束模式也逐渐变大,对杂波的抑制能力变弱。
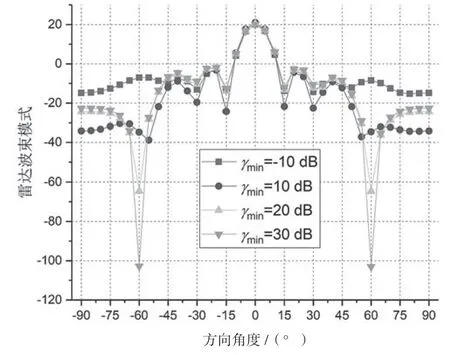
图4 UT 平均波束模式与雷达最低SCINR 阈值γmin 的关系
如图5 所示,本文研究了不同雷达SCNR 阈值γmin下的用户设备和速率。从图中可以看出,用户设备的和速率随着SCNR 阈值的增加快速增长,这是由于SCNR 阈值的增加,导致对功率需求的增加,导致用户设备的传输速率增加。值得注意的是,随着SCNR 阈值γmin的增加,用户设备URLLC 的和速率的增长速度也逐渐变慢,此时雷达的性能要求对URLLC 通信的影响变大,使得功率分配等都有了变化,从而使得用户和速率增加变缓。另外,用户设备的和速率也随着基站天线数目M的增加显著增加,这是因为基站天线数目的增加可以增加空间自由度,减少用户间的干扰,提升信号接收质量,改善接收信号信噪比,从而提高用户设备传输速率。
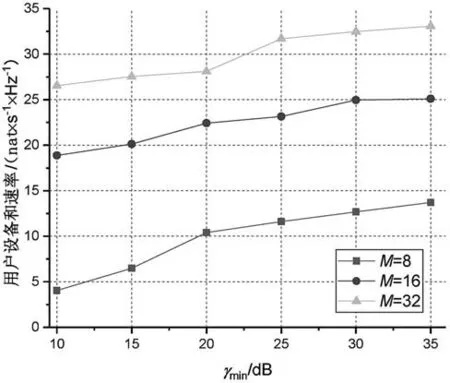
图5 不同雷达SCNR 阈值γmin 和基站天线M 下的用户设备和速率
4 结语
为了应对未来网络中的感知和高可靠低时延通信需求,设计了ISAC 与URLLC 融合的方案。该方案利用通感一体化基站同时实现雷达感知与超可靠低时延通信,并建模用户设备和速率最大化优化问题,利用优化相关理论与近似方法获得了雷达与URLLC 预编码设计方案,同时满足了通信性能与雷达感知性能。仿真结果表明,本文提出的算法能够很好地满足雷达感知性能要求,且获得的通信速率也较好。
