点云数据在海上平台设备三维数字化重建中的应用
2024-03-20刘峥,吴巍,高阳
刘 峥,吴 巍,高 阳
(中海油能源发展装备技术有限公司设计研发中心,天津 300452)
0 引言
海上油气田作为离岸设施,在生产运营过程中存在现场支援成本高、运维时效较低、海上与陆地方案沟通困难、数据传输通道有限、原工程模型完整性不足等问题,对三维数字引擎提出了特殊的要求。为有效克服传统数据采集方式的弊端,本文创新性的将三维激光扫描与无人机航拍技术相互融合,并以此为基础开展了海上平台三维数字化重建的应用研究。
1 无人机技术与三维激光扫描数据采集技术
对客观物体的描述通常包含有外形、纹理等信息,对于其空间信息的表达主要包括图像、点云两种模式[1]。由于二维图像信息无法进行多角度分析,因此人们对三维空间信息有着迫切的需求。无人机航拍以及三维激光扫描是获取空间数据的主要手段,是三维数字建模的重要基础,也是高精度空间数据模拟的重要方式。
1.1 无人机航拍数据采集技术
无人机航拍技术能够快速获取高分辨率的影像数据,具有轻便灵活、响应快速等优势。通过搭载高精度的传感器可以实时精确获取高分辨率的影像数据,确保数据建模的精度。从成本上来看,无人机耗费少,其控制系统可以按照既定航线自动采集数据,能够确保采集人员的人身安全。
根据无人机飞行原理和动力系统的差异,可以将其划分为固定翼无人机、旋翼无人机以及扑翼式无人机,不同搭载平台各有优势,在实际中需要根据实际情况选择合适的无人机。航测系统是无人机采集的核心,由飞控系统及地控系统两部分组成。其中,飞行控制系统包括GPS、传感器、中央处理器等,能够对预设采集参数做出快速响应;地面控制系统能够进行航线规划,并实时监测飞行状态和任务进程。
在外业数据采集过程中,需要根据规范布设一定数量的控制点,这直接关系着后续成图建模的精度。根据精度的不同,其布设方案分为全域布点以及局部布点两大类,前者精度较高但是作业量大,多用于地形条件理想且测区范围小的情况。目前常用的布点方案有基于航带的布点方式以及区域网布点方法。随着GPS快速动态单点精度的提升,其被越来越多的应用到摄影测量像控点的联测中,实际应用显示该方法的精度和效率较高。影像数据处理主要包括工程建立、空中三角测量、点云编辑等,在处理前重点检查航线拼接效果,以及是否存在坐标参数问题等。空中三角测量可以在不接触测量目标的前提下对平台设备进行测定,能够获取精度分布均匀的测量结果。空中三角测量后,加密点云自动生成DTM(Digital Terrain Model,数字地面模型)。
1.2 三维激光扫描数据采集技术
为满足海上平台三维建模的精度要求,采用三维激光扫描技术对视角范围内的空间曲面进行采集,经处理后可以获取平台区域完整的空间信息。与GPS、全站仪等设备相比,三维激光扫描仪每秒可以获取数万个点数据,采集效率更高。三维激光扫描是无接触式的数据采集方式,不受测量空间的束缚,适合平台危险区域、条件复杂场所的数据采集,能够保障测量人员的人设安全。除此以外,该采集方式能够高效地获取设备细节信息,比如材料、纹理等,点云数据经拼接处理后可随意分割[2]。
三维激光扫描系统将点激光投射到三维空间,通过计算轴心到空间某点的距离,使得激光源旋转并得到平台设备目标表面的线激光,进而计算得到垂直、水平方向的扫描角度和距离信息。
2 点云数据处理及三维重建技术
2.1 点云数据处理
无人机航拍和三维激光扫描采集获取的信息数量庞大,且较多为冗余信息,为提升三维建模的精度和效率,需要进行点云精简、分类、降噪等处理工作。此外,两种采集方式获取的数据采用了不同的坐标系,需要将两者数据坐标系统一,方便数据的整体利用[3]。
(1)点云数据噪声去除。数据采集过程中,受平台设备运行以及仪器振动等因素的影响,使测量数据存在噪声。点云数据噪声的存在,会影响平台设备信息的提取,进而对平台三维模型的构建产生负面影响,并可能造成模型表面粗糙。双边滤波算法是将三维数据降维到二维平面,即将原始数据向参考平面做正射投影,并将投影点间的欧式距离定义为灰度值。将投影点定义为像素值,对二维影像数据进行双边滤波,通过迭代降噪获取目标数据。但双边滤波降噪方式容易将设备形状的复杂细节部分变得平滑,影响设备的真实特征。
应用鲁棒降噪算法可以去除点云数据中的小尺度噪点,该算法以搜寻到的局部极大值为聚类中心,以此为基础,对海量数据进行聚类分析。对比传统的降噪方法,鲁棒降噪算法能够更好地获取海上平台设备原始模型的数据,通过选择合适的阈值去除噪声信息。在聚类过程中,多选择内在收敛性较好的Mean-Shift 算法,将点云数据中的局部最大似然值归为同一类,并进行局部滤波。对于离散点云数据,多采用拉普拉斯算法进行降噪,该方法能够将高频噪声数据进行扩散处理,具有各向同性、速度快等优势,但是在处理过程中会导致有效数据向密集处偏移,导致平台设备模型表面变形。针对该方面的弊端,可以采用基于平均曲率的网格模型降噪方法,即沿着法向、切向两个方向对顶点信息进行调整,进而有效规避模型表面的变形。
降噪过程中,应重点关注以下3 点:①保证平台设备模型表面不变形;②预处理点与所选邻域点相同,噪声去除效率高;③鲁棒性好,确保数据降噪后不会产生二次噪声。采集到的数据进行两次鲁棒降噪后,噪声得到了有效剔除,平台设备的细节特征也得到了较好的保留。
(2)点云数据冗余信息去除。实际应用中点云数据量数以亿计,基于该数据规模开展平台设备三维模型重建,将会给计算机软、硬件带来极大的负担[4-5]。为此,在满足平台设备模型重建几何特征的前提下,对冗余数据进行精简处理,尽可能地用最小的采样点、最大程度地展示海上平台设备的几何结构特征。
当前常用的精简方法有包围盒法、基于曲率的精简法、随机采样法等。包围盒法以目标点云数据为中心构建最小外接立方体,对大立方体进行分割,该方法对于平台设备表面相对简单且变化均匀的模型具有较好的精简效果。对于表面结构复杂的平台设备模型需要应用基于曲率的精简法,该方法针对单点构建邻域并进行曲面拟合,依据曲面方程计算曲率并进行点云精简。随机采样法则是构建随机函数,并将计算出的采样点从点云数据中删除,直至满足最终的精简率。当面对数据量较大的情况时,该方法精简后的数据难以准确体现平台设备表面的细节特征,导致设备三维建模精度不够。
考虑到海上平台设备的复杂性,将研究区域划分为曲率无明显变化区域、变化较小区域以及变化较大区域三部分,其中对于曲无明显变化的平台区域选择随机采样法,对于变化较小的平台区域选择包围盒法,而曲率变化较大的区域则应用基于曲率的精简法。以曲率变化较小的区域为例,基于包围盒法设置空间距离为5 cm,将点云从15 223 个精简至7805 个,精简后拟合的三角网无显著变化,可以看出该方法在达到精简数据量的同时,最大程度上保留了平台设备的原始表面特征。
(3)点云数据拼接。对于不同采集方式获取的点云数据,源于不同的传感器,这些数据能够从不同的角度表征设备的表面特征。无人机航拍和三维激光扫描两种数据采集方法优势互补,二者融合应用能够高精度的获取平台设备整体以及细节信息。无人机航拍采集方式对应像控点坐标系,三维激光扫描仪对应基准站坐标系。为保证后续三维模型重建的效率,在采集过程中利用基准站配准方法将激光扫描数据转移到整个工区的坐标系,实现坐标系的统一,完成多源点云数据拼接操作。
2.2 三维模型重建
平台设备三维模型重建时,特征点识别与重建与点云数据分析密切相关。为此,需要对降噪、精简、拼接后的数据进行分类,以提升三维模型重建的效率和自动化程度。通过定义起始点和邻域大小的方式,拟合曲面将平台地面点数据从中分离,其余的数据点集合为平台设备面点。
对于平台大范围场景的模型重建来说,利用无人机航拍获取的点云数据构建三角网,使其尽可能接近平台整体模型的表面,在此基础上对三维激光扫描仪获取的数据进行提取,获得平台设备的外形轮廓,通过精细编辑获取设备的线框模型并封装成面。对整体模型的三维重建来说,需要将不规则的离散点云数据进行规则化处理。目前常用拟合三角网的方式实现三维模型的精确表达。为了避免点云数据封装模型中包含错误信息,需要将三角网格转换为多边形。
对于海上平台设备设施来说,其重建方式包括自下而上的数据搭建以及自上而下的模型搭建两种。其中前者多为传感器采集的点云数据,通常情况下通过精细编辑可构建最终的设备三维模型;后者则是以预先设计的平台整体基本单元为基础,利用采集到的点云数据实现与设备模型的最优匹配,最终完成建筑物的重建。与模型搭建方法相比,基于数据的重建方法对于点云数据质量的依赖性较高,如果有效数据缺失较多,则难以提取高质量的特征线,进而影响建模的进程。为此,本次研究将两种建模方式相结合,通过优势互补提升了平台设备三维模型的建模精度。基于多源拼接处理的点云数据构建完整的平台设备表面信息,通过对平台设备进行特征提取,并导入3ds max 进行模型仿真,对于特征细节提取效果不佳的部分可采用模型搭建的方式对局部细节进行重构,应用外业采集的照片进行校正匀色和纹理贴图,最终得到理想的三维模型。以渤海油田为例,基于点云数据处理及三维重建的海上平台设施设备数字化仿真效果如图1 所示。
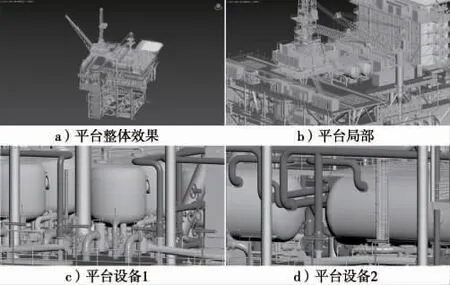
图1 海上平台三维重建仿真效果
3 结束语
在海上油田数字化建设的过程中,为了提升平台设备三维建模的精度,本文利用无人机航拍以及三维激光扫描等方式获取点云数据,对数据进行降噪、精简、合并,并结合大场景三维重建的方法,实现了海上平台设备的三维构建,有效提升了建模工作的效率和精度。
