基于超级电容的水下平台混合能源系统研究
2024-03-15王孙清郑恒持徐纪伟李彬彬
王孙清,郑恒持,徐纪伟,于 朝,李彬彬,孔 昕
(1. 中国船舶科学研究中心,江苏无锡 214082;2. 深海技术科学太湖实验室,江苏无锡 214082;3. 深海载人装备全国重点实验室,江苏无锡 214082)
0 引言
近年来,随着海洋科技的快速发展,海洋开发和勘探所需的水下装备迅速增加。相应地,对水下能源的需求也日益旺盛。深海能源的获取、传输和管理技术已成为海洋工程领域的研究热点。深海能源供应技术水平决定海洋开发速度,影响海洋强国的发展命脉。开发水下能源新技术,建设取之不尽、用之不竭的多能互补水下能源供应平台,将极大促进水下装备的大潜深、长续航和规模化进程,为建设海洋强国奠定坚实的基础。目前水下装备的供电方式可分为有缆和无缆两种。有缆方式工作深度有限,在水下复杂环境中供电连续性不高;无缆方式主要采用自给式方案,如通过自带储能电池供能,或者通过携带燃料进行现场发电等。但大型水下平台往往对电能的需求较大,受体积和重量的限制,电池容量往往不能满足需求。燃料电池内部几乎不含任何机械运动的部件,具有高效率、零排放、低噪声的特点。因此,燃料电池可以很好地应用于大型水下作业平台。但是,燃料电池在单独供电时,其输出特性偏软,动态响应慢,无法实时满足负载的能量需求的快速变化。并且在负载功率突增时可能会威胁燃料电池的安全运行,大功率作业型设备工作时有可能在停止或者制动时由于能量回馈造成电压泵升引起电网振荡。为了应对随机性、间歇性、波动性负载以及独立运行对负荷投切敏感等技术问题,确保燃料电池能够安全稳定运行,提高燃料电池的经济性以及使用寿命,可以在燃料电池供电系统中加入锂电池、超级电容等辅助能源,起到能量缓冲的作用,使大功率负载能够安全地接入系统,提高能量利用率。本文提出了一种以燃料电池为主,蓄电池和超级电容为辅的深海能源基站储能系统。超级电容采用双闭环控制,以保证母线侧的电压稳定,仿真验证了超级电容充放电控制策略的可行性。
1 深海能源基站供电系统结构
本文研究的深海能源基站系统由燃料电池、蓄电池、超级电容及负载组成,是一个孤立且复杂的微电网。该系统中各组成部分分别通过电力电子器件与直流母线相连。

图1 深海能源基站供电系统结构图
1)燃料电池模块:燃料电池主要负责为整个深海能源基站的正常运行提供能量,通过单相DC/DC 变换器连接到直流母线。
2)混合储能模块:混合储能系统由电池和超级电容器组成,均通过双向DC/DC 变换器连接到直流母线。其主要负责储存多余能量并释放负载所需的能量,从而维持直流微电网系统的稳定运行。
3)负载模块:负载由直流负载和交流负载组成。直流负载通过DC/DC 变换器接入直流母线,而交流负载通过AC/DC 变换器与直流母线相连。微电网系统运行时,当能量不足以满足负载的需要,可以依次选择非重要负载进行切除,从而保证电网的稳定。
2 超级电容充放电控制策略
各国学者在上世纪七八十年代开发出超级电容,通过极化电解质存储能量,也称为法拉电容器。其容量范围可达1 至10 000F,远高于普通电解电容的pF 或μF 量级。它与传统的化学电源不同,是一种介于传统电容器和电池之间具有特殊性能的电源。它主要依靠双电层电荷转移来储存电能,但其储能过程中并不发生化学反应。这种储能过程是可逆的,因此具有优异的循环能力,可以反复充放电数十万次。超级电容与蓄电池相比,具有环保免维护、充放电电流较大、整个寿命周期较长等优点,可以极大改善传统电池在亏电等某些恶劣工况下无法正常输出、充电效率低下、应急响应不及时等缺陷,将二者运用在储能系统中可达到互补的效果。超级电容的控制采用与锂电池类似的控制方法,同样采用非隔离型半桥DC/DC 变换器进行充放电。本文将详细介绍超级电容的充放电控制方法,从而能够更好地为负载进行供电。
超级电容的充电和放电过程是能量双向流动的过程,功率变换器需实现储能设施储存和释放能量的双向性流动。双向DC/DC 变换器可以实现能量在双向的流动,可以更有效对超级电容进行充放电,同时保证两端电压稳定,降低功耗,减少资源浪费。双向DC/DC 变换器DC/DC 变换器分为隔离型和非隔离型两种,本文中所使用的是非隔离型双向半桥DC/DC 变换器,其拓扑结构如图2 所示。整个系统中负载直流母线的压是高于超级电容电压。
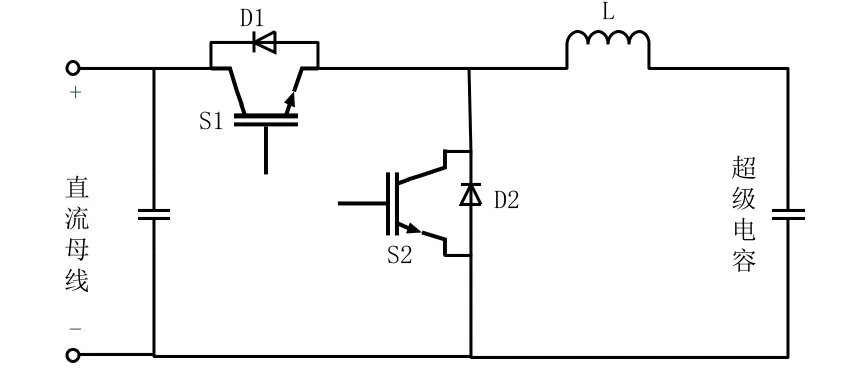
图2 双向半桥DC/DC 变换器拓扑
整个系统中电流是双向流动的,也就实现了超级电容的充电和放电过程。当双向半桥DC/DC变换器工作在升压模式时,超级电容放电,当双向半桥DC/DC 变换器工作在降压模式时,超级电容充电,其等效电路如图3 所示。
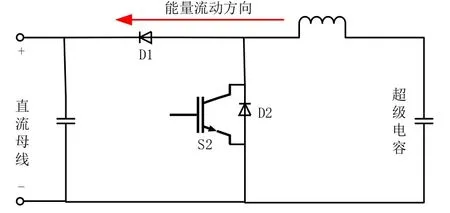
图3 放电模式等效电路
当超级电容需要放电时,开关S2 为PWM 工作方式,开关S1 关断。0-DT 时间内开关S2 导通,超级电容放电向电感L 充电;DT-T 时间内开关S2 断开,超级电容与电感L 通过开关管S1反并联的二极管D1 向直流母线释放能量,维持直流母线电压稳定,下个周期重复同样的动作。
当超级电容工作在充电状态时也就是双向变换器工作在降压模式,其等效电路如图4 所示。
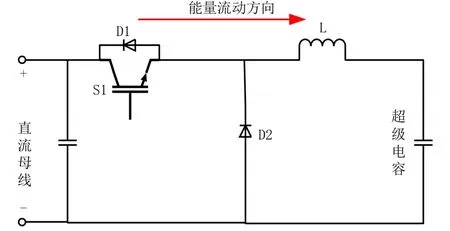
图4 充电模式等效电路
充电模式下,开关S1 为PWM 工作方式,开关S2 不工作。0-DT 时间内开关S2 导通,超级电容放电向电感L 充电;DT-T 时间内开关S2 断开,超级电容与电感L 通过开关管S1 反并联的二极管D1 向直流母线释放能量,维持直流母线电压稳定,下个周期重复同样的动作。
为了保证输出电压的稳定,充放电控制都采用闭环反馈的控制方法。而闭环控制又分为单闭环控制和双闭环控制。单闭环是只将输出电压作为反馈量,构成单环控制系统来控制开关信号。双闭环是将输出电压作为外环反馈,经过PI 调节后作为内环电感电流的给定量,构成电压电流双闭环控制,从而提高整个系统的响应速度和可靠性。本文采用电压电流双闭环控制。如图5 所示为超级电容充放电系统中所搭建的PI 控制电路模型。

图5 电压电流双闭环控制结构
3 仿真模型搭建及结果分析
利用PSIM 软件搭建系统仿真模型,模型如图6 所示。主电路使用双向buck-boost 电路,可以看做一个半桥电路。从左向右是buck 模式,从右向左是boost 模式。直流母线位于高压侧,超级电容位于低压侧,双向DC/DC 变换器在其工作象限内,输入输出电压极性不变,电流方向双向变化,实现能量的双向流动。
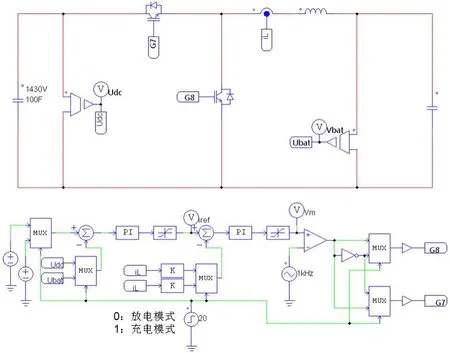
图6 超级电容充放电控制仿真模型
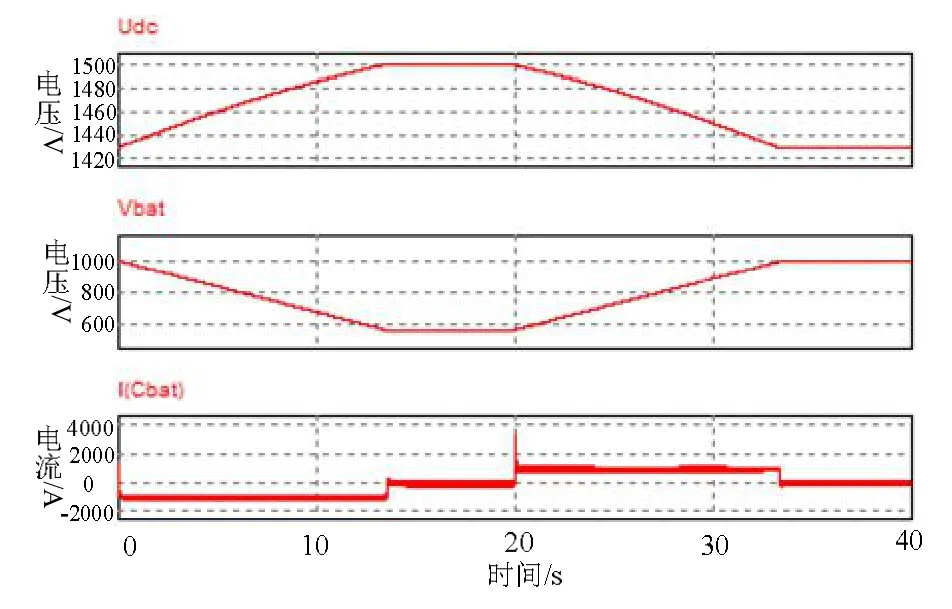
图7 充放电仿真波形
为了保证充放电的电流电压均可控,使用电压电流双闭环控制,双向工作均为双闭环,通过切换工作模式,切换对应的控制变量,来实现对应能量方向的控制。
控制模块中,Mux 模块的信号切换器,控制端为0,接通第一个信号,控制端为1,接通第二个信号,以此来切换2 种模式下的反馈信号。左边是母线电压/电容电压的电压给定,母线给定是1 500V,电容给定的1 000V。给定和对应的电压反馈量作差后经过电压环的PI 控制器,得到电流环的给定值。为了不超过范围,使用限幅器进行限制。电流环的给定再和实际电感电流作差,得到电流误差,经过电流环的PI 控制器后得到控制量,即占空比。限幅后和三角波比较,产生对应的PWM 波,驱动两个开关管进行开关,实现电压电流闭环控制。
在母线侧需求功率瞬间增大和系统进行减速或者能量回馈工况下进行了仿真,仿真结果波形如下图所示。
波形的前20 s 为超级电容放电,母线电容充电状态,母线电压Udc不断上升直到1 500 V,超级电容电压Vbat不断下降,从1 000V 下降到500 V 左右。母线电压充到1 500 V 后,超级电容不再放电,从超级电容的电流波形I(Cbat)可以看出,母线电压未达到1 500 V 时,超级电容的放电电流为1000 A,母线电压达到1 500 V 后,超级电容的放电电流为0 A。
20 s 后为超级电容充电,母线电容放电状态。母线电容的电压从1 500 V 不断下降,超级电容的电压不断升高,直到超级电容的电压达到1 000 V,充电停止。从超级电容的电流波形可以看出,超级电容电压未达到1 000 V 时,充电电流为1 000 A,超级电容电压达到1 000 V 充满时,充电电流变为0 A。
4 结论
提出了一种以燃料电池为主,蓄电池和超级电容为辅的水下电源混合动力系统,着重研究了超级电容功率控制,采用双闭环控制,以保证母线侧的电压稳定,仿真验证了超级电容充放电控制策略的可行性。通过双向DC/DC 变换器可在系统重载降超级电容存储的电能释放出来,在系统轻载、减速或制动等工况下降回馈再生电能存储至超级电容中,实现削峰填谷效果,具有一定工程指导意义。