基于PLC的自动测流机器人系统设计
2024-03-14王茂灿梁西昌侯嘉瑞夏新雲田超群王泉钧
王茂灿,万 熠,梁西昌,侯嘉瑞,夏新雲,田超群,王泉钧
(1.山东大学机械工程学院,山东 济南 250061;2.山东大学机械工程国家级实验教学示范中心,山东 济南 250061;3.山东大学工程训练中心,山东 济南 250002)
0 引言
水文数据的采集与检测分析对防汛减灾、水资源管理以及促进社会可持续发展有重大意义[1-3]。近年来,随着我国科技的不断进步,工业自动化程度不断提高,水文领域的数据采集与检测正在向着高精度、智能化的方向发展[4]。
目前,市场上的测流方式按照采集方式主要分为手动测流和自动测流两种。手动测流指操作人员手持测流仪器到固定采集点进行数据采集。其具有采集方便、无需搭建平台、容易操作的优势。但手动测流的缺点是一次测量的效率较低,且需要大量的人力和物力[5-6]。随着人们对河道测量自动化要求的不断提高,手动测流方式已经不能满足智能、高效的测量需求[7]。自动测流方式凭借测量方便、智能化程度高、操作简单等优势,逐渐在测流工作中发挥重要作用[8]。但目前的自动测流仍需要人员现场控制测流机器人,存在测量模式单一、野外工作环境复杂及供电困难等问题[9]。
针对上述不足,本文提出了一种基于可编程逻辑控制器(programmable logic controller,PLC)的自动测流机器人系统。该机器人系统具备运动系统、采集系统、人机交互以及远程通信四大模块。硬件系统依靠驱动装置来满足铅鱼的收放需求和机器人的运动需求。软件系统采用PLC作为主控制器,设计了数据采集梯形图,实现了测流机器人的数据采集控制。人机交互指操作人员控制测流机器人和读取采集数据的功能。其结合4G远程通信技术,将操作指令和采集数据传输到服务器。现场模拟开展的试验结果证明了测流机器人系统的可行性。
1 自动测流机器人系统硬件设计
1.1 自动测流机器人系统工作场景需求
为满足测量需求、实现河道自动测流,本文首先在河流上方为机器人系统搭建一条特定轨道,以便机器人能够在河道截面任意位置利用多种传感器进行数据采集;然后在河岸设置测流机器人充电房,在保护机器人的同时解决了户外供电难等问题,实现了无人值守的河流数据自动采集。河流剖面采集如图1所示。
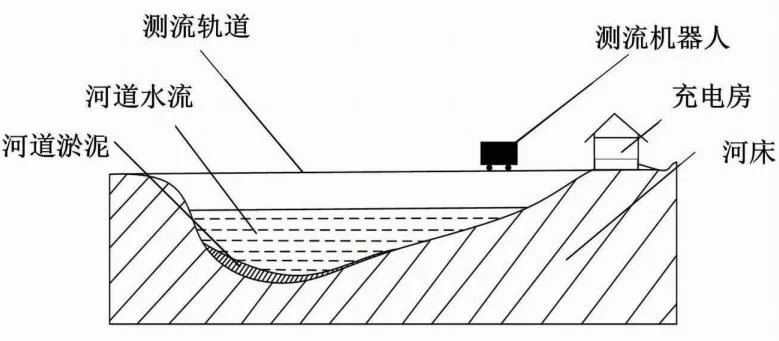
图1 河流剖面采集示意图
1.2 自动测流机器人系统功能需求
自动测流机器人系统是一种能代替人工进行河流信息自动采集的智能机器人系统。该机器人系统通过各类传感器对河流信息进行采集,并结合远程操控技术达到了高效率、高精度、多模式、自动化的测流目标。自动测流机器人系统续航能力需达到2.4 h;需具备单点测量和多点测量两种模式;需满足流速、流量、水温、水深和淤泥深度的河道信息采集要求;测量范围最大为25 m;行驶速度最快达到0.4 m/s。
1.3 自动测流机器人系统硬件设计
自动测流机器人系统整机尺寸约为1 400 mm×60 mm×600 mm,整体结构具有防水、防沙功能,能够适应恶劣数据采集环境。自动测流机器人系统不仅要求较高的自动化程度,还要具有高效率、高精度、多功能及高鲁棒性的性能,以满足野外复杂环境下河道信息采集的需求。自动测流机器人系统整体结构如图2所示。

图2 自动测流机器人系统整体结构图
为达到轻量化的目的,自动测流机器人系统车体整体采用铝合金材质,在保证结构稳定的前提下优化了结构设计。自动测流机器人系统内部用于放置传感器、电机、控制箱、电源等设备,外部有操控屏、通信天线和指示灯等器件。自动测流机器人系统传动装置主要包括驱动和采集两个部分。
1.3.1 驱动部分
自动测流机器人系统采用V型轮作为行驶轮。直流电机通过齿轮减速器连接后轮驱动轴以提供驱动力。自动测流机器人系统能以0~0.4 m/s的可调速度在固定铁轨上作前进和后退。直流电机输出轴安装编码器以测量自动测流机器人的行走速度和距离。
1.3.2 采集部分
自动测流机器人系统采集部分主要负责河流信息采集。自动测流机器人系统内部的钢丝绳通过导线轮一端连接铅鱼,另一端连接卷扬滚筒。在直流电机的带动下,卷扬滚筒通过正反转来实现铅鱼的收放功能。导线轮处安装的编码器用于采集铅鱼的位置和速度信息。铅鱼上安装的多普勒流速仪和超声波泥位计用于采集河道的流速、流量、淤泥深度、水温等数据。车身安装的超声波物位计用于采集河道的水深信息。铅鱼收放结构如图3所示。
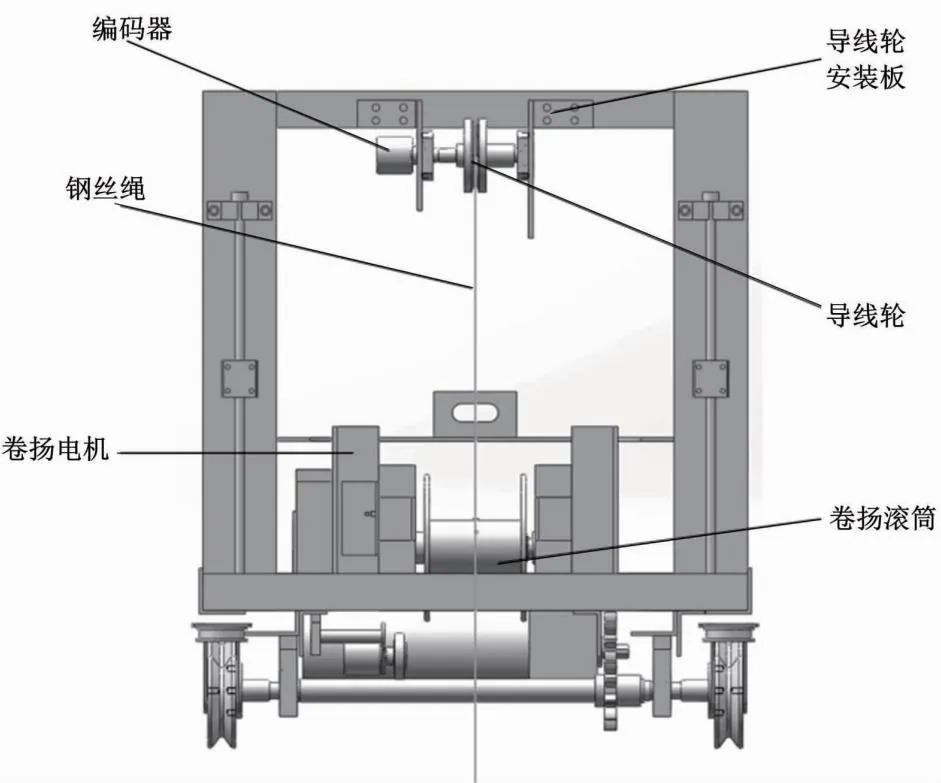
图3 铅鱼收放结构图
2 自动测流机器人测控系统设计
2.1 自动测流机器人硬件采集系统设计
自动测流机器人硬件采集系统如图4所示。
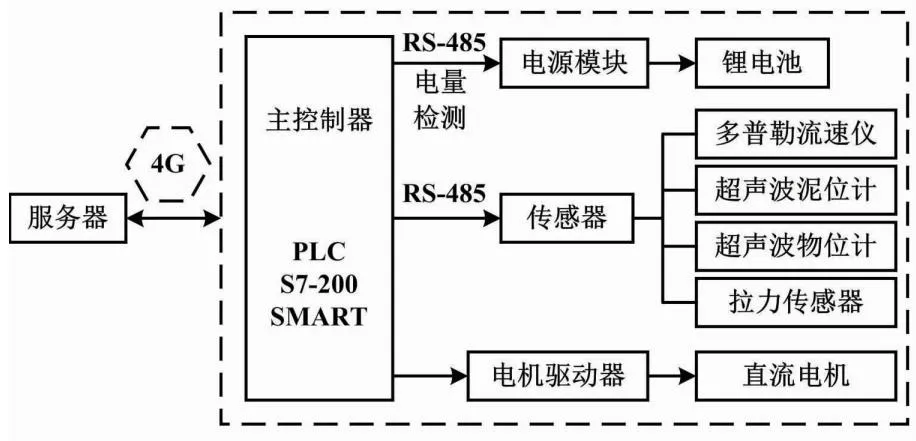
图4 自动测流机器人硬件采集系统图
硬件采集系统主要由主控制器、多普勒流速仪、超声波物位计、超声波泥位计、电源模块、直流电机以及电机驱动器等硬件组成。该系统可实现自动采集、手动采集、自动充电、故障自检等功能,并能够将各部分传感器采集的数据通过RS-485上传到主控制器,从而在人机界面(human machine interface,HMI)实时显示采集的数据。
主控制器采用西门子PLC S7-200 SMART。凭借着稳定性强、扩展性强、运算能力强等特点[10],该PLC能够在复杂的工作环境下快速完成采集工作,并将传感器采集的数据实时显示在HMI。HMI通过4G远程技术将现场采集的数据传输到服务器,以完成服务器对自动测流机器人系统的实时远程操控。自动测流机器人系统由主控制器控制电机驱动器来驱动直流电机正反转,实现测流机器人系在轨道上的前进、 后退,以及铅鱼在定滑轮上的上升和下降动作。采用编码器测量测流机器人行走的距离和铅鱼下降的高度,能使测流机器人精准地在采集点开展采集工作。HMI不仅用于显示数据,还可实现对机器人的实时人工操控。
自动测流机器人系统的动力来源于锂电池。在采集任务中,自动测流机器人系统带有电量自检功能。当电量低于系统设定值时,自动测流机器人系统将自动返回起点进行充电。
服务器配置了Intel(R)Core(TM)i5-7300HQ CPU@2.50 GHz处理器,并安装了EdgeAccess远程操控系统。服务器通过4G技术与自动测流机器人系统建立连接,随后通过远程操控设置自动测流机器人系统的测量模式、测量深度以及行进速度等信息。参数设置完成后,运行命令通过4G下发至自动测流机器人系统,以实现对自动测流机器人系统的远程控制。完成采集后,自动测流机器人系统将测量数据自动保存并传输至服务器,以便操作人员查询采集数据。
2.2 自动测流机器人软件系统设计
自动测试流程如图5所示。

图5 自动测试流程图
根据自动测流机器人系统选用的主控制器,本文在服务器安装STEP 7-MicroWIN SMART编程软件,以设计自动测流机器人软件系统。自动测流机器人系统具有手动操作和自动操作两种方式。手动操作的主要功能是控制自动测流机器人系统的前进、后退,铅鱼的上升、下降,卷帘门的开关等操作。自动操作根据程序设定,以实现数据的智能采集。
在自动运行模式下,自动测流机器人系统完成自检工作后,按照设定的测量模式在固定轨道上开展采集任务。自动测流机器人系统完成采集任务后返回充电房自动进行充电并保存采集数据;同时,将数据上传至云端数据库,供工作人员实时查看、分析。相较于人工手动采集,整个自动采集过程的效率和可靠性得到了大幅提升。
根据自动测流机器人系统的实际功能需求,本文将机器人软件系统分为运动控制、数据采集、远程传输和故障诊断四部分。自动测流机器人系统功能如图6所示。
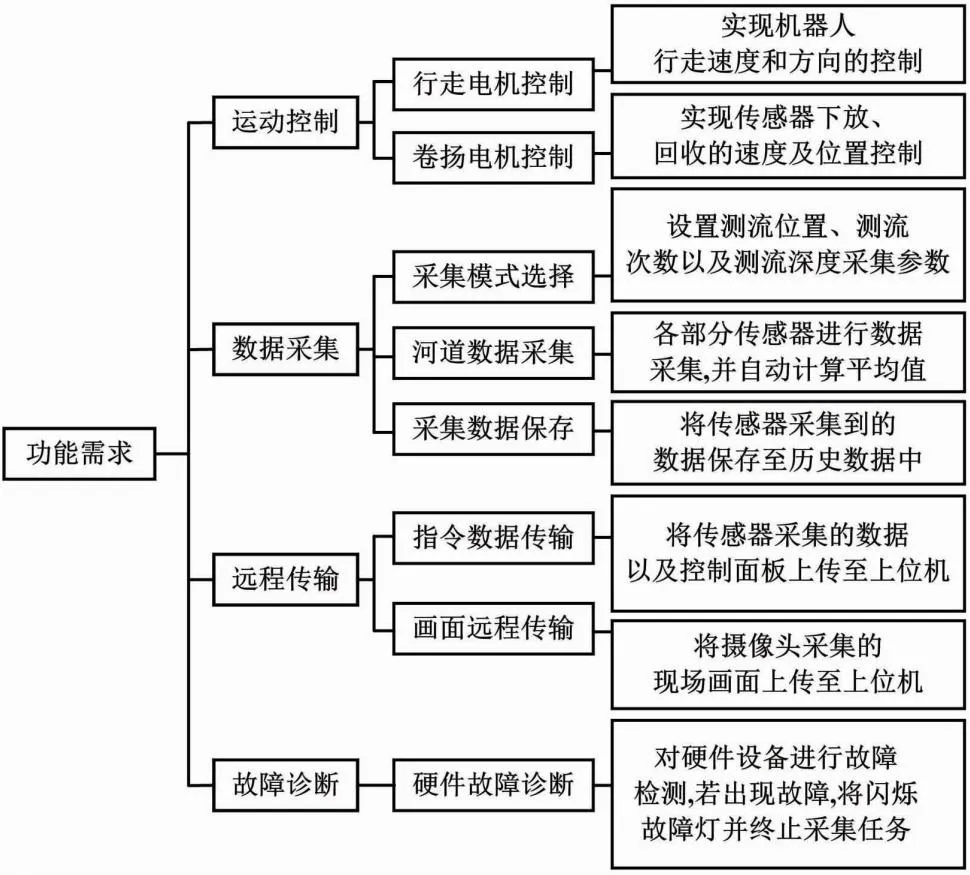
图6 自动测流机器人系统功能图
3 自动测流机器人系统模拟采集试验
在自动测流机器人硬件、软件系统搭建完毕后,本文临时搭建测试轨道以进行功能测试。
自动测流机器人运动控制程序通过主控制器控制驱动器来调整行走电机和卷扬电机的速度和转向。数据采集程序通过RS-485与各部分传感器进行通信,将采集的数据解析后存放于主控制器的寄存器中并进行数据传输。远程操控程序主要将采集数据和操作命令通过4G技术传输到服务器,通过多传感器采集数据实现远程河流信息的监控[11-13]。故障诊断程序主要用于检测主控制器、电机以及各部分传感器等硬件的状态信息是否异常[14]。
自动测流机器人成功连接服务器后,首先通过服务器进行手动功能测试,在预设轨道上测试各项功能是否正常;随后设置测量模式和电机转速等参数,以测试自动测量功能;最后设置采样点,以进行数据的采集测试。
自动测流机器人系统选用步科的HMI作为操控屏,将HMI主要分为操作区和显示区两大部分。操作区包括参数设置区、控制区以及测量模式选择区三部分。 显示区主要包括数据采集显示区和系统信号检测显示区两部分。在主界面中,操作员完成电机参数设置后选择测量模式,并点击“自动启动”;HMI将自动操作的命令发送至主控制器,则自动测流机器人系统开始采集任务,并将采集的数据实时显示在操控屏上。
自动测流机器人系统组装完毕后,在室内展开了功能测试。由于室内测试没有将超声波泥位计、多普勒流速仪放入河流中进行数据采集,HMI显示的水流速度、静压液位和瞬时流量都为零,其他数据默认显示传感器的上限值。超声波水位计具有距离测量和物位测量两种测量方式。水位高度的实时数据为距离测量模式,即测量自动测流机器人与地面的距离。三个测量点采集的数据为物位测量模式,即水面到水底的距离。该数据在这里显示为0。经过实际测试,自动测流机器人系统能够完成数据采集、保存与传输等功能。
数据查询界面是将传感器每次采集的数据自动保存至内存卡。操作人员可以点击“数据查询”按钮查找历史采集数据,以便分析河流信息。
4 结论
本文针对当前河道测流存在的效率和自动化程度较低、测量模式单一等问题,基于PLC控制系统,设计了一款河道自动测流机器人系统。首先,自动测流机器人系统能够在河流轨道上通过主控制器实现启停运动。然后,自动测流机器人系统结合多种传感器,能够实现河流流速、流量、淤泥深度等数据采集的功能。最后,通过对自动测流机器人系统的现场调试,并不断优化自动测流机器人系统的运行程序,可以满足自动测流机器人的功能需求。试验结果表明,该测流机器人系统不仅自动化程度高、测流模式多,而且测量效率高、鲁棒性较好。该系统为以后开展河道自动测流机器人多数据采集、智能高效采集以及远程河流信息采集等研究奠定了基础。
