空间小碎片抱捕用连续型机器人结构综述
2024-03-12杨承旭王丽华危清清赵志军王耀兵
杨承旭 王丽华 危清清 赵志军 王耀兵
(1 北京空间飞行器总体设计部 空间智能机器人系统技术与应用北京市重点实验室,北京 100094)(2 吉林大学,长春 130025)
伴随近地空间中空间小碎片的增加,空间环境逐渐恶化的问题不容忽视[1],而基于空间机器人的在轨操作是清理空间小碎片的重要手段之一[2]。根据关节和连杆在整体机构中的尺寸比例,可将机器人分为离散型机器人、超冗余机器人和连续型机器人[3]。目前广泛应用于空间环境的机器人类型是离散型机器人,然而此类机器人在对碎片进行抓捕时需要精确识别目标并跟踪抓捕点,抓捕难度大,可靠性低[4]。连续型机器人具有收拢后分段常曲率和多点接触的特点,能够利用机器人本体形成稳定抱捕构型来捕获小碎片[5],无需精确识别目标与跟踪抓捕点,可有效降低抓捕难度,提高可靠性。故使用连续型机器人的空间抱捕任务有重要的研究意义。
空间环境中的高真空、强辐射、极端温度对连续型机器人的结构设计提出要求。本文基于空间环境的特点并面向空间抱捕任务的连续型机器人的结构需求,对连续型机器人的驱动方式、绳驱动连续型机器人的主干特征、关节特征进行分类,并比较其优劣。
1 空间抱捕任务要求
空间抱捕任务的目标是近地空间中的小碎片,根据位于德国的欧洲航天局空间碎片办公室提供的数据,目前由空中监视网络追踪并编目的碎片数目约为34810个。然而,并不是所有的空间物体都可以被追踪并编目,空间中漂浮的碎片数量远大于此,根据统计模型估计,在地球轨道中存在超过36500个大于10cm的空间碎片[6]。对于这些直径较大的空间碎片采用连续型机器人进行空间抱捕是一种直接有效的清理办法。在空间环境中使用连续型机器人进行小碎片的抱捕任务要同时克服空间环境的应用难点与抱捕任务的任务需求。
进行抱捕的空间环境温度较为极端,在距地面200km的低轨道,空间温度变化范围可以达到-43~+219℃;而在距地面36000km的地球同步轨道,空间温度变化范围可以达到-100~+168℃;高温与低温的影响使得连续型机器人暴露于空间环境的执行部分不能使用受温度影响大的组件。同时,高度为200km时空气密度已降低至2.73×10-4kg/m3,此环境下真空度较高,需要进行密封性处理的组件应用较为困难。
空间抱捕任务的目标是直径大于10cm的空间碎片,由于这些碎片的产生方式不同,形状不规则,无法准确识别外形信息。且受到地球引力、太阳辐射压力、大气拖力等因素的影响,碎片在空间中的运动速度快,存在自旋转。空间碎片的运动特点需要连续型机器人的结构能够具有足够的刚度来维持抱捕构型,使机器人在冲击下不会使目标逃逸;同时具有一定的柔性来分散抱捕载荷,减轻结构损伤。空间碎片的外形特点需要机器人具有多自由度来实现大容差的环绕抱捕;同时需要机器人的姿态准确可控,可达到理想的抱捕姿态。
2 连续型机器人的驱动方式
空间小碎片抱捕任务需要连续型机器人的驱动方式能适应空间环境,并提供足够的驱动力来稳定抱捕构型。目前连续型机器人的驱动方式可依据驱动装置是否外置分为外置驱动、内置驱动、混合驱动。
1)外置驱动
外置驱动的典型代表是绳驱动。该方式将驱动装置置于机器人外部,通过连接装置(驱动绳)来间接驱动机器人运动。其中,驱动绳本身并不具备支撑机器人主干结构的功能。美国克莱姆森大学设计的绳驱动象鼻(Elephant’s Trunk)机器人具有一定的承载能力[7]。哈尔滨工业大学的绳驱动连续型机器人[8-9]质量较轻。绳驱动连续型机器人具有结构简单、容易控制、温升较小等优点,相较其它驱动方式对于使用环境的要求较低,且具有一定的承载能力,可作为太空中进行抱捕任务机器人的驱动装置,如图1所示[8]。
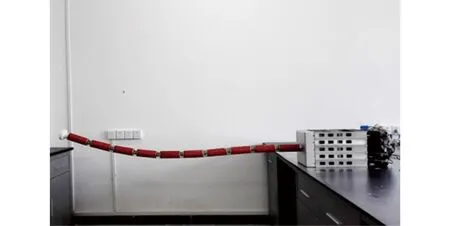
图1 绳驱动连续型机器人
2)内置驱动
常见的内置驱动有3种,分别是气体驱动、智能材料驱动和预弯曲同心管驱动。
美国气动(OctArm)连续型机器人[10]具有多余自由度,见图2(a)。针对气动机器人可操作性差的问题,西安交通大学的新型气动肌肉机器人改进了控制方式[11]。气动的连续型机器人具有质量较轻、响应速度快、柔顺性高的优点,但是气体的可压缩性会导致机器人的整体控制精度较低[12],并且降低了机器人的刚度。此外,由于空间环境属于超真空,气动机器人需要进行特殊的密封性设计,空间应用性价比较低。

图2 内置驱动
采用新型智能材料作为驱动装置的连续型机器人统称为智能材料驱动机器人。智能材料在光电热刺激下可产生不同程度的形变,可驱动具有柔性主干的连续型机器人在不同方向产生转动。日本川崎公司设计的使用离子交换聚合金属材料(Ionic Polymer Metal Composite,IPMC)驱动的连续型机器人[13]在施加驱动电压产生形变后,结构复原较慢。北京航空航天大学的形状记忆合金(Shape Memory Alloys,SMA)驱动仿象鼻机械臂[14]体积小、质量轻、具有较大的收缩比(可达到50%),见图2(b)。在空间环境中,材料散热困难,形变后复原时间长,无法在短时间内改变形态。智能材料驱动在空间应用需要材料具有快速响应特性。
预弯曲同心管机器人也是一种内置驱动机器人,这种连续型机器人体积小、柔顺性强,适合用于狭小空间内探测。但空间抱捕任务需要连续型机器人具有一定的结构刚度来维持稳定的抱捕构型,故预弯曲同心管机器人不能满足任务需求。
3)混合驱动
混合驱动是指在连续型机器人中同时使用内置驱动与外置驱动。在这种驱动方式中,气体驱动与绳驱动的组合较为常见,气体驱动更多作为机器人的主干来维持机器人的整体柔顺构型并实现大范围运动,绳驱动用来实现机器人的位置微调。美国克莱姆森大学的混合驱动连续型机器人气动混合(Air-Octor)[15]质量较轻,见图3。意大利比萨圣安娜大学的老年人护理混合驱动的连续型机器人[16]具备柔顺外形,可减轻碰撞力。混合驱动的连续型机器人兼具气压驱动机器人的柔顺性和绳驱动机器人的高精度。但混合驱动需要协调多种驱动装置同时工作,装配精度要求高。与气动机器人相同,混合驱动机器人有密封性要求,应用于空间抱捕任务还存在大量有待突破的关键技术。
外置驱动、内置驱动、混合驱动3种驱动方式对比见表1。

表1 连续型机器人驱动方式的特性比较
空间中的高真空与极端温度对机器人的机构性能提出了要求,为了提高机构的可靠性,应该选择结构相对简单的驱动方式。绳驱动的连续型机器人具有结构简单、容易控制、空间环境适应性强等优点,且具有一定的承载能力,适合应用于空间小碎片抱捕任务。本文以绳驱动连续型机器人为对象开展进一步分析。
3 绳驱动连续型机器人的主干
空间小碎片抱捕任务需要连续型机器人的主干具有一定刚度来维持抱捕构型防止目标逃逸,也需要一定柔顺性来分散碰撞力,同时需保证机器人操作精度,主干的弯曲形式需要可控。本节针对第1节所分析的适用于空间任务的绳驱动连续型机器人的主干形式进行讨论,基于文献[9,17]对连续型机器人的分类,提出了一种新的分类方式:依据绳驱动连续型机器人中是否含有刚性主干与柔性支撑可分为刚性连续型机器人、刚柔混合连续型机器人、柔性连续型机器人;其中,刚性连续型机器人依据是否含有联动关节可细分为刚性联动式连续型机器人和刚性全主动连续型机器人。
绳驱动刚性联动式连续型机器人的主干由多个臂段串联而成,每个臂段包括多个刚性臂杆与关节,一段中的关节之间通过使用绳联动来传递运动。哈尔滨工业大学的绳驱动刚性联动式连续型机器人[18]每个臂段的8个自由度联动为2个独立的自由度,臂段内任一关节的运动将通过导向盘辅助联动绳联动至其余关节,臂段所需驱动电机数较少,结构质量轻。哈尔滨工业大学的另一种连续型机器人[19]通过“大、小8字型联动”将单关节的运动传递至其它关节,这种联动结构使机器人的整体控制精度较高,如图4所示。绳驱动刚性联动式连续型机器人的优点是工作空间大,同时减少了驱动电机数量。且每个臂段内的关节运动具有一致性,控制精度高,应用于空间抱捕任务具有优势。

图4 绳驱动刚性联动式连续型机器人
绳驱动刚性全主动连续型机器人通过驱动绳对分段主干中的每个关节进行单独控制,以实现连续型机器人的多自由度运动。哈尔滨工业大学的全主动机器人[8]由10个模块化的2自由度关节串联,使用30个电机对各关节进行驱动,质量较大。湖南大学的变截面连续型机器人具备10个自由度[20],同时保证较高的控制精度。绳驱动刚性全主动连续型机器人难以兼顾电机数目与工作空间,在空间抱捕任务中应用具有一定局限性。
绳驱动刚柔混合连续型机器人通过在刚性主干之间的关节中添加柔性材料来传递运动并维持构型。北京航空航天大学的球铰绳驱动刚柔混合连续型机器人[21]依靠橡胶垫片来传递运动/力,存在控制精度低的问题。北京空间飞行器总体设计部的连续型机器人[22]通过在关节之间增加弹簧组成刚柔混合结构来增强结构柔顺性。绳驱动刚柔混合连续型机器人具有较高的柔顺性和对环境的适应能力。但是依靠柔性支撑进行传力会降低机器人的刚度并增加控制难度,在空间抱捕任务中应用,需要采用具有快速响应能力的控制算法以及精确的力反馈系统,并实时监控机器人姿态,协调难度较高。
绳驱动柔性连续型机器人采用柔性材料作为主干,构型更加平滑柔顺,趋近于具有无限自由度。罗马尼亚克拉约瓦大学的绳驱动柔性连续型机器人[23]由于具备弹性材料主干,结构较为柔顺,见图5。香港中文大学的绳驱动柔性机构(Constrained Wire-driven Flexible Mechanism,CWFM)[24]采用主动约束来控制柔性主干的长度,扩展了工作空间并增强了灵活性。使用柔性主干的连续型机器人结构刚度相对较低,在空间抱捕任务中难以维持抱捕构型,因而应用受到限制。可变刚度设计能扩展其操作能力,是目前研究的热点之一。
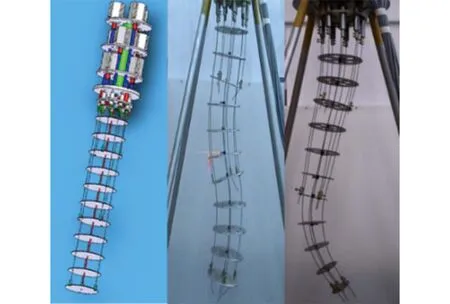
图5 绳驱动柔性连续型机器人
表2比较了具有不同主干特性的绳驱动连续型机器人。

表2 绳驱动连续型机器人的不同主干特性比较
空间抱捕任务要求连续型机器人具有灵活性强、结构刚度大、工作空间大、精确性高的特点。绳驱动刚性联动式连续型机器人不具有柔性结构,整体结构刚度较大,同时由于关节之间实现绳联动,无需对各关节单独进行驱动,在扩大机器人工作空间的同时减少驱动电机的数量,减轻了结构质量。绳驱动刚性联动结构较为符合空间抱捕任务对连续型机器人提出的结构要求,具有良好的应用前景。
4 绳驱动连续型机器人的关节
空间抱捕任务所需的连续型机器人为了完成在复杂环境中运动与小碎片抱捕,同时简化控制难度,机器人每个臂段只需要在驱动绳的牵引下实现2自由度的弯曲。本节基于第1、2节的分析,研究不同主干类型的绳驱动连续型机器人所使用的关节,并讨论不同类型的关节进行绳联动的可行性与复杂程度。绳驱动连续型机器人可应用的常见关节为万向节、转动副、球铰、2自由度并联腕(3-UU)关节。
万向节是绳驱动连续型机器人常见的关节连接方式,如图6所示[18]。清华大学的连续型机器人中,每个臂段中的6根臂杆都通过万向节进行连接[25],通过联动绳来保证单个臂段中万向节运动的同步性。哈尔滨工业大学的连续型机器人采用具有中空结构的万向节来实现转动,中空结构用于布置传感器的电源线和信号线[17]。万向节具备2个方向的自由度,使用万向节的连续型机器人结构简单、紧凑。同时万向节能够通过绳联动实现关节同步运动,同步运动的万向节使得机器人在运动时具有分段等曲率的几何特征,从而增强操控性能。适合作为绳驱动刚性联动式连续型机器人的关节。

图6 万向节关节
转动副具有1个自由度,在早期连续型机器人中应用较多。哈尔滨工业大学的绳驱动内窥镜机器人使用转动副关节[26],各臂段中环形臂杆两侧的铆接耳呈90°交叉布置形成万向环,结构可拓展。哈尔滨工业大学的另一种转动副连续型机器人每一臂杆两侧的铆接耳相差15°布置[27],由12个转动副串联而成的机器人可实现末端6自由度的运动。使用转动副的机器人为实现三维空间运动,常将转动副90°交替排布形成万向环。驱动力的传递往往靠关节碰撞实现,控制精度低,如图7所示[28]。

图7 转动副
球铰类似人体关节,具有两个弯曲自由度和一个旋转自由度。中国科学院大学的连续型机器人采用球铰连接[28],结构简单。东南大学的变刚度球铰仿生连续型机器人[29],同时安装气囊和弹簧装置来调节球铰的关节刚度,结构可拓展。球铰具有结构简单、安装便利的优点。但安装在连续型机器人中的球铰需要限制扭转自由度,增加控制难度,难以满足空间抱捕任务对连续型机器人的控制精度要求,如图8所示[28]。
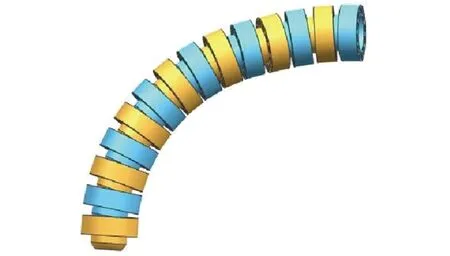
图8 球铰
3-UU关节结构较为复杂,由三根连杆和两个刚性盘组成,连杆和刚性盘连接处可进行2自由度运动。由韩国理工大学所设计的线驱动双臂(LIMS2-AMBIDEX)机器人将3-UU关节应用于机器人的手腕中[30],结构刚度较低,需要安装紧固装置。哈尔滨工业大学设计了基于该关节的绳驱动刚性联动式连续型机器人[31],由于3-UU关节存在的同一自由度两侧长度变化一致的特点,通过约束相邻关节的两侧来实现绳联动。3-UU关节的结构不够稳定、刚度较差,应用于空间抱捕任务需提升结构刚度,如图9所示[31]。

图9 3-UU关节
针对各关节特性的对比见表3。

表3 绳驱动连续型机器人的不同关节特性比较
结合应用于空间抱捕任务的机器人特征需求发现,需要关节之间实现联动,完成运动/力的传递。由于万向节能够实现绳联动,并且结构稳定,制造与安装的难度较小,更加适合应用于空间环境。此外,在万向节的绳联动设计时还需要考虑转动范围、传动效率、绳索受力等多重约束,以提高关节的综合性能。
5 需关注的关键问题
结合前文的分析,连续型机器人驱动方式、主干结构和关节的形式选择直接影响机器人的性能。
针对空间抱捕任务的特殊应用需求,开展面向此类任务的连续型机器人结构设计需考虑如下3方面的问题:
(1)连续型机器人的驱动方式需要满足空间环境适应性。绳驱动对环境要求低,同时使用绳驱动的连续型机器人往往具有较高的结构刚度,适合作为空间抱捕连续型机器人的驱动装置。3种内置驱动具有结构柔顺、连续性强的优点,但是气体驱动对密封性要求较高,智能材料驱动在空间环境中散热困难,无法短时间内多次改变构型,预弯曲同心管机器人结构刚度较差,无法满足维持抱捕构型的刚度需求。故应用于空间抱捕任务的连续型机器人驱动方式面临的关键问题在于:如何在满足空间环境要求的前提下,不断提升驱动力、速度等关键性能。
(2)连续型机器人的主干需要满足抱捕任务的刚度要求。连续型机器人为了提高刚度与控制精度,可采用刚性分段主干,然而刚性分段主干的整体连续性、柔顺性不如柔性主干。柔性主干和在刚性主干中添加柔性支撑形成的刚柔混合结构在一定程度上提升了机器人的柔顺性,但控制难度随之增加。对于空间小碎片抱捕任务,既需要连续型机器人具有较好的刚度以维持预期的抱捕构型从而防止目标逃逸,又需要具有一定的柔顺性以避免抱捕过程产生较大的接触碰撞力,刚度设计需要结合目标特性和任务要求综合权衡。
(3)面向空间抱捕任务的刚性主干连续型机器人关节需要综合考虑自由运动和力传递的矛盾。连续型机器人的关节需要具备足够的自由度来满足超冗余自由度特性,同时还需要实现主干运动和力的传递。多自由度运动和运动/力传递之间的矛盾是关节设计需要解决的核心问题,此外还需要关注的设计约束包括关节等效刚度、运动干涉、局部强度等。
6 空间抱捕连续型机器人结构研究展望
针对空间小碎片抱捕任务特点,连续型机器人结构的后续重点研究方向以下3方面。
(1)针对具体任务开展结构参数优化:空间小碎片抱捕任务对连续型机器人的刚度与灵活性等指标提出要求,需要结合抱捕对象的外部几何特性确定连续型机器人结构特征参数,使其在工作空间内保证一定的灵活性并具备维持抱捕构型的刚度。对此,需要从连续型机器人的杆件长度和直径、关节自由度和最大转角、绳孔位置和绳联动摩擦特性等多维度统筹考虑,对机器人进行结构优化,以满足抱捕任务的需求。
(2)提高机器人结构的感知能力:连续型机器人在抱捕任务中需要基于和目标碎片的接触位置、接触力等信息来调整自身构型和抱捕力。因此,需要在机器人的驱动绳、主干、关节上布置力传感器、触觉传感器、角度传感器等传感装置,通过多信息融合获取完整的外部信息,为连续型机器人的精确控制提供基础。这些传感器的布置需要与机器人结构进行一体化设计,确保信息获取的准确、实时、可靠。
(3)适应空间运动碎片抱捕策略的结构特性设计:空间小碎片存在速度快、自旋转、形状不规则等特点,直接抱捕操作可能超出连续型机器人的承载能力导致任务失败。因此设计抱捕控制策略为:在抱捕开始前控制连续型机器人顺应目标碎片运动;在接触目标时依据自身结构特性快速响应目标外形特点,减慢目标速度并消除旋转;当目标可被安全抱捕时控制机器人进行抱捕操作。依据上述控制策略,从抱捕碎片的动力学特性出发,建立“碎片-机器人”动力学模型和控制模型,通过抓捕过程的动力学-控制联合仿真获取所需的机器人驱动能力与响应特性,在此基础上建立连续型机器人结构优化目标函数,通过反复迭代得到最优结构参数。
7 结束语
本文分析了国内外连续型机器人的研究与应用现状;结合在空间中完成小碎片抱捕任务的应用需求,对连续型机器人的驱动方式、绳驱动连续性机器人主干特征、关节特征进行分析比较,得到如下结论。
(1)绳驱动的连续型机器人具有结构简单、容易控制、空间环境适应性强等优点,驱动方式的选择需结合抱捕小碎片任务需求和空间环境限制综合考虑。
(2)连续型机器人的主干刚度设计需兼顾构型保持和接触冲击要求,关节设计需要合理解决多自由度运动和力传递之间的矛盾。
(3)从空间抱捕任务特点出发开展机器人驱动能力、响应能力和感知能力设计是绳驱动连续型机器人未来重点发展方向。
