面向微纳遥感星座构建的阻力差分控制方法
2024-03-12张国云龚轲杰何雨帆陈军蔡立锋王超马腾贺于珍
张国云 龚轲杰 何雨帆 陈军 蔡立锋 王超 马腾 贺于珍
(西安卫星测控中心,西安 710043)
微纳卫星一般指质量在1~100kg的卫星,其具有体积小、质量小、研制周期短、功耗低、发射方式灵活、能以更低成本完成很多复杂空间任务等优势,已在低轨通信、高分辨率遥感、导航增强、科学探索等领域得到广泛应用[1-3]。近年来,国内外微纳遥感卫星数量迅速增加,通过高频重访大幅提升对地观测的时间分辨率,从而满足高时效应急观测需求[4]。
为满足微纳遥感星座对地观测需求,实现对全球目标的高频重访,通常将所有微纳遥感卫星均匀等相位分布在同一轨道面上。微纳遥感卫星发射入轨后首先需要完成相位捕获,原理是利用卫星的半长轴差实现相位漂移,在适当的时机减小星座卫星间的半长轴之差,以实现相位捕获。因此,若不考虑卫星的高度维持需求,通过控制星座卫星的半长轴衰减,理论上可以完成星座组网。微纳遥感星座成规模化部署,数量多,受限于整星功耗、质量、体积和成本要求,一些微纳卫星一般无推进系统[5-7]。例如:美国行星(Planet)公司的鸽群星座[8]不装备推进系统,使用阻力差分控制技术实现卫星的相位分布与构型维持[9-11]。美国轨道通信(OrbComm)星座35颗卫星利用阻力差分与推进相结合的控制方式完成站位保持。2013年的气动立方星-4(AeroCube-4)任务中,通过控制太阳翼展开或收回完成星间距离的控制[12],最终将3颗卫星部署于预定轨道。目前,国内尚未有阻力差分控制技术应用于微纳遥感星座构型建立的先例,仅有利用大气阻力进行星座控制的理论研究。文献[13]中研究了大气阻力对卫星星座的控制方法,文献[14]中研究了利用大气阻力进行卫星星座站位保持的方法。尽管阻力差分控制技术已经在国外有成功应用,但仍存在一定缺点。鸽群星座卫星的太阳翼面板与星体固连,只能通过调节卫星姿态实现高、低阻力模式的切换,而且需要兼顾卫星遥感任务,指令生成过程较为复杂,调节频次高[5]。气动立方星-4任务中展开或收回太阳翼的操作,可能影响星上能源,并不适用于大多数卫星。
本文研究无推进微纳遥感星座构型建立,提出在阴影区动态调整太阳翼角度以改变迎风面积的方式,从而改变卫星半长轴的衰减率,实现阻力差分控制,相位调整期间无需改变卫星飞行姿态,不会影响成像任务与星上能源。本文的阻力差分控制方法可为大规模、低成本微纳遥感星座的建立提供参考。
1 阻力差分控制原理与方法
1.1 阻力差分控制原理
利用阻力差分实现卫星的相位控制由莱纳德(Leonard)在1989年提出,其原理是在低轨道(一般低于500km)利用大气阻力,通过增加或减小卫星的迎风面积改变卫星的运行速度,从而在卫星间形成需要的相位关系,实现星座构型的建立[15]。利用阻力差分实现卫星相位控制的优点包括减少推进系统的质量、无推进剂废气污染、产生的相对加速度很小等。因此,阻力差分控制技术已成为对控制时效性和精度要求较低的微纳遥感卫星实现轨道控制任务和编队飞行任务的优选。
双翼太阳翼是许多低轨卫星标准配置,本文研究的微纳遥感星座卫星[16]安装1维驱动的双翼太阳翼。太阳翼的转动通常可以由星上程序设定,基于能源考虑,在阴影区动态调整太阳翼迎风面积,控制卫星进入高阻力或低阻力飞行模式。区别于鸽群星座,控制期间无需改变卫星飞行姿态,不影响成像任务。采用阻力差分控制技术在轨运行示意对比如图1和图2所示。图1是鸽群卫星控制期间2种机动姿态[3-5],图中箭头方向指向卫星的飞行方向。其中:图1(a)是低阻力模式,迎风面积最小;图1(b)是高阻力模式,迎风面积最大;高阻力模式下产生的阻力是低阻力模式下产生阻力的8倍。图2是本文研究的调整太阳翼的2种模式,图中箭头方向指向卫星的飞行方向。图2(a)是低阻力模式,太阳翼转角180°,迎风面积最小;图2(b)是高阻力模式,太阳翼转角90°,迎风面积最大。经仿真计算,高阻力模式下的平均大气阻力为低阻力模式的1.3倍~1.4倍。
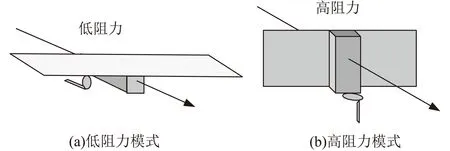
图1 鸽群卫星的2种姿态模式
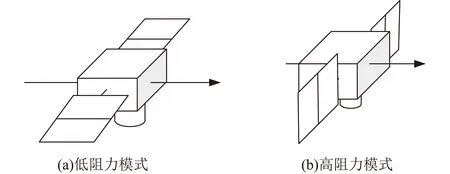
图2 太阳翼的2种调整模式
对于同一轨道面相同高度(500km左右)的不同面质比的卫星,地球非球形摄动、日月引力摄动、太阳光压摄动的综合影响与大气阻力差产生的影响相比,可以忽略[17],因此,本文只考虑大气阻力摄动对轨道半长轴的影响。低轨卫星所受大气阻力摄动加速度可以表示为[18]
式中:Cd为卫星的阻力系数;A为卫星的迎风面积;m为卫星质量;ρ为大气密度,不考虑大气旋转;v为卫星运行速度。
假设微纳星座卫星运行于500km高度的太阳同步轨道,所有卫星位于同一轨道面。入轨最大高度差不超过2km。微纳星座卫星气动外形一致,质量相同,相同阻力模式下运行整圈的太阳翼转动程序完全相同,可以认为相同高度的相同阻力模式的卫星所受大气阻力的影响基本一致。追踪卫星与基准卫星所受大气阻力之差即为阻力差分。切向只考虑大气阻力的摄动作用,半长轴高斯摄动方程为[18]
式中:a,n,t分别为卫星轨道半长轴、平均轨道角速度和时间。
2种阻力模式下的半长轴衰减率之差为
式中:a0,n0,ad0分别为基准卫星的半长轴、平均轨道角速度和大气阻力加速度;a1,n1,ad1分别为追踪卫星的半长轴、平均轨道角速度和大气阻力加速度。
2颗卫星半长轴相近时,2种阻力模式的衰减差可表示为
平均轨道角速度n表示为[18]
式中:μ为地球引力常数。
若用平均轨道角速度n表示相位θ漂移速率,式(5)对a求导可以将相位漂移速率线性化表示为
可见,2颗卫星相位漂移速率与半长轴之差成正比。
式(5)对时间求导,可得
2颗卫星相位漂移加速度可以线性化表示为
阻力差分相位控制原理可以用如下线性系统来表示[7]。

1.2 阻力差分控制方法
安装推力器的遥感星座组网通过半长轴控制实现相位漂移与刹车,考虑的是卫星燃料消耗与组网时间的平衡,而阻力差分控制方法实现星座组网一般考虑的是尽可能发挥最大控制能力。阻力差分对相对半长轴的控制能力决定了相位控制能力Bk(uk),从而决定了完成组网的时间。阻力差分控制能力越强,即高阻力模式与低阻力模式下导致轨道高度衰减差值越大,最终完成组网的时间越短。
微纳遥感星座组网的阻力差分控制可以分解为2个问题:①指定每颗卫星在最终星座部署中的位置;②规划高、低阻力模式的调节时刻(控制窗口计算),生成高、低阻力指令,使每颗卫星进入指定的相位保持范围。
1.2.1 星座构建的阻力差分控制方法流程
对于问题①,本文不考虑组网期间的相位交换,将高度最低的基准卫星标称相位指定为0,根据其轨道高度从低到高,标称相位从0°~-360°依次平均排列。

本文研究的微纳遥感星座的特点是标称相位顺序与高度相关,不同卫星由于初始高度不同,完成相位捕获的时间也不尽相同,高度较低的卫星可能率先完成相位捕获,相对较高的卫星可能最后完成相位捕获。率先完成相位捕获的卫星,在相位追赶过程中(C阶段),其高、低阻力模式下的阻力差分控制能力评估结果可以为未完成相位捕获卫星提供参考。
假设所有卫星在高阻力模式或低阻力模式下的半长轴衰减率一致。根据上述策略,理想情况下微纳遥感星座卫星相位控制过程示意如图3所示。

注:ΔtA,ΔtB,ΔtC分别为A阶段、B阶段、C阶段的持续时长;和分别为A阶段和B阶段的末时刻漂移率。
一方面,由于大气密度随空间环境变化,阻力差分控制能力随之变化;另一方面,随着卫星高度降低,大气密度增大,阻力差分控制能力也会相应增大。因此,阻力差分控制能力是随时间动态变化的,微纳遥感星座的相位部署不能完全按照理想情况实施高、低阻力模式的切换,否则相对高度较高的卫星相位极有可能落位不准,实际组网过程中需要不断根据最新空间环境预报及卫星所处高度进行计算评估。组网起漂阶段,先对阻力差分控制能力进行仿真估计,并开展在轨测试,利用定轨数据对阻力差分控制能力进行验证,利用解析法计算各追踪卫星低阻力模式与高阻力模式的切换时刻。
为了尽量避免相位超调,实际相位控制过程可以适当提前结束B阶段。实际相位控制过程如图4所示。与理想相位控制过程的区别主要体现在:C阶段需要多次根据阻力差分控制能力最新评估结果进行高、低阻力模式的调整,采用阶梯式降低相对高度的方法,能稳步实现相对高度控制与相位捕获。
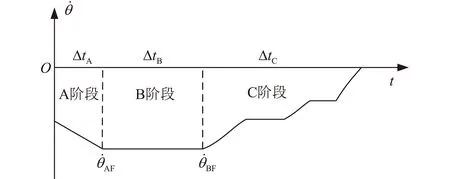
图4 实际相位控制过程
阻力差分控制方法的实现包括5个步骤。①确定标称相位:基准卫星相位为0,轨道高度从低到高,标称相位从0°~-360°依次排列。②A阶段控制:进行阻力差分控制能力在轨测试评估;计算ΔtA,将基准卫星保持高阻力模式,时长为ΔtA。③B阶段控制:追踪卫星与基准卫星均保持低阻力模式;根据阻力差分控制能力测试评估结果,计算ΔtB,实时更新剩余漂移时长;当B阶段剩余时长小于3天时,结束B阶段,开始C阶段控制。④C阶段控制:保持基准卫星低阻力、追踪卫星高阻力模式;按照C阶段控制的实施步骤动态调整追踪卫星阻力模式。⑤组网结束:所有卫星到达指定标称相位保持环中且半长轴基本一致时,组网结束。方法实现中涉及到的时间计算、C阶段控制实施步骤、阻力差分控制能力评估将在下文论述。
1.2.2 控制窗口计算


B阶段(相位自由漂移)可以描述为
C阶段(相位追赶)可以描述为
1.2.3 C阶段控制的实施步骤
1.2.4 阻力差分控制能力评估
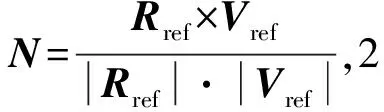
本文提出对2颗卫星相对位置矢量夹角进行拟合的方法,对阻力差分控制能力进行评估。通过对相同时间段不同阻力模式下2颗卫星的相位进行二次多项式拟合,评估它们相位的差分控制能力,并用其相位漂移加速度计算半长轴衰减差值。具体描述如下。

θosc,i=angle(Rref,Ri)
(18)
(19)

2 实例验证
设低轨微纳遥感星座包括无推进能力的卫星20颗,星座构型要求将20颗卫星同轨道面等相位分布,为如期完成星座部署任务,本文采用阻力差分控制方法实现微纳遥感星座的相位控制。选取微纳遥感卫星中初始轨道高度最低的卫星5为基准卫星。以20颗卫星均匀分布为目标,追踪卫星与卫星5相距指定相位(相邻卫星相位间隔18°)为星座完成构建的标志。

注:θosc为真实相位;θfit为拟合相位。


表1 星座初始状态与调整日期
卫星目标相位由相对轨道高度决定,根据星座设计目标,星座完成部署后,所有卫星期望相位分布关系如图6所示,20颗卫星基本在同一轨道面均匀分布,间隔18°,相位保持环为±2°。
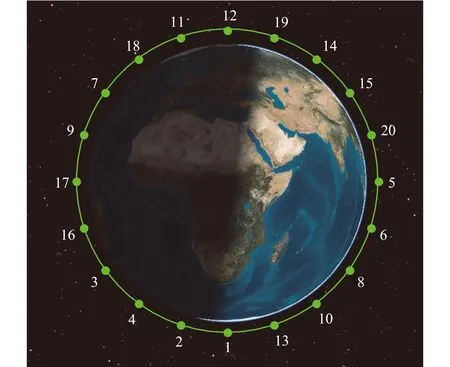
图6 期望相位分布
图7是2023年6月30日后20颗卫星的相位随时间的演化情况(图中标称相位附近的红色数字代表卫星编号,0,50,100,150表示调整天数)。由图7可知:大约从初始时间150天后,20颗卫星已完成相位捕获,目前均处于±2°的相位保持环内。
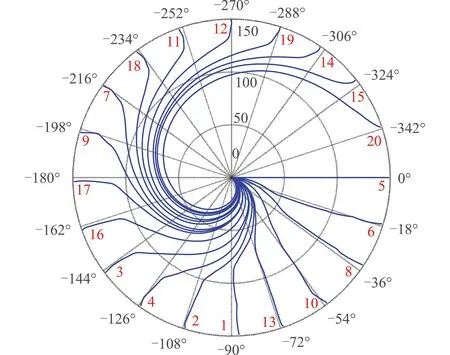
图7 相位随时间变化的极坐标图
3 结束语
微纳遥感星座利用阻力差分控制方法已于2023年成功完成星座构建,这是国内无动力微纳星座构建的首次尝试,对减少微纳卫星研制生产、星座在轨维护成本及提高遥感卫星利用效率具有重要意义,可为同类大规模星座的部署提供参考。通过事先计算高、低阻力模式的控制窗口,可以及时更新阻力差分控制能力评估结果,以及高、低阻力模式的持续时长,尽量避免组网过程相位的超调,减少调节指令的上注频次。后续研究可以将组网时长作为优化目标,最大程度利用阻力差分控制能力减少相位漂移时间,缩短整个星座组网周期,并进一步研究微纳星座完成组网后的星座构型维持策略。