浮式风力机若干特征动力学问题综述
2024-03-12程友良曹淑刚万声权
程友良,曹淑刚,3,万声权
(1.华北电力大学 动力工程系,河北 保定 071003;2.华北电力大学 河北省低碳高效发电技术重点实验室,河北 保定 071003;3.龙源(北京)新能源工程设计研究院有限公司,北京 100034)
海上风电作为一种新兴清洁能源,发展潜力巨大。根据支撑结构不同,海上风电可分为固定式和漂浮式2种。其中,漂浮式风电通过漂浮在水中的浮体支撑上部风电机组并利用系泊锚固定于海底,可应用于水深超过60 m 的深远海海域[1]。1972 年,Heronemus[2]率先提出漂浮式海上风电的概念,但直到20 世纪末,该项技术才引起人们的关注。随后,美国可再生能源实验室(NREL)于2004 年开始漂浮式风电的研究工作并持续至今[3],先后开展OC3~OC6等[4-7]多个研究项目,在浮式风力机气动—水动—系泊理论研究、数值仿真及模型试验方面取得了丰硕的成果,开发了著名的FAST 软件。直到2009 年,世界第一台漂浮式风电样机Hywind Demo 进行海试[8],漂浮式海上风电才从理论向实践迈出了第一步,在此基础上,英国于2017 年建成第一个漂浮式海上风电场[9],标志着浮式风电技术逐步实现商业化。相比而言,中国漂浮式风电起步较晚,2012 年,国家863 计划项目首次对浮式风力机技术研究进行立项支持,到2018 年才真正开始漂浮式试验样机研发工作。但基于“双碳”目标的提出,中国在漂浮式风电技术研发方面后劲十足,截至2023年7月,已完成3台浮式样机的研发及海上安装,并仍有3个试验示范项目正在推进过程中[10]。
虽然漂浮式海上风电前景广阔,但其技术难度大,相关动力学问题仍处于探索研究阶段[11-13]。浮式风力机动力学问题涉及风力机—浮体—系泊锚固—海床之间的多体耦合,并受伺服控制、随机波浪、湍流风、潮流以及台风、海啸、地震等极端环境条件影响,而浮式风力机运行又对稳定性要求较高,《DNVGL-RP-0286》[14]建议浮式风力机运行时塔顶最大加速度不宜超过0.3g,最大倾角不宜超过10°,这给浮式风力机系统设计带来较大挑战。对浮式风力机的稳定性和抗风浪性能进行评估,准确预测其在复杂海洋环境中的耦合动力响应,是开展浮式风力机系统设计的前提,也是其动力学问题研究的重要内容。这里将对目前典型浮式风力机面临的几个特征动力学问题进行研究和分析,并对该类问题常用的研究方法及研究进展进行综述。
1 漂浮式风力机类型及特性
漂浮式海上风力机形式灵活多样,但大部分可以归纳为4种[15]形式(如图1所示):立柱型、半潜型、驳船型和张力腿型。不同形式具有不同的适用水深和技术路线,但所有的形式都是由风电机组、浮体、系泊系统组成,且都是依靠浮体漂浮在水面上支撑上部机组,通过系泊系统进行定位,浮体和系泊系统长期经受风浪流荷载的作用,故所有类型的漂浮式风力机系统面临的动力学问题及研究方法比较一致,但不同形式之间由于浮体结构或技术路线的不同仍然存在个性问题需要单独讨论[16-17]。

图1 漂浮式海上风力机类型[18]Fig.1 Diverse categories of floating offshore wind power
1.1 立柱型浮式风力机
立柱型浮式风力机又称Spar 型,其特点在于浮体采用细长柱体结构,长度可达60~100 m。柱体一般分为硬舱及软舱两部分,硬舱用来提供浮力,软舱用来调节压载以降低整个结构的重心,最终可使整个浮体的重心位于浮心之下,从而获得足够的回复力矩和较大的横摇、纵摇惯性阻力,这种设计理念保证了整个系统的稳定性,使得立柱型浮式风力机成为所有类型中抗倾覆能力最强的一种。与此同时,立柱型浮式风力机采用较小的水线面设计且吃水较深,使其具有良好的抗垂荡性能。虽然立柱型设计具有诸多优点,但也伴随着产生一些特征动力学问题,如在海流的作用下细长柱体两侧会产生交替脱落的漩涡,这使得立柱结构受到周期性的脉动压力,继而引发涡激运动,当涡激升力与结构频率接近时会造成锁频(lock-in)现象,引起共振。同时立柱型浮体不同自由度之间的运动响应会有耦合效应,相关的数值和试验研究发现当立柱型浮体垂荡周期大约为横摇或纵摇周期2 倍时,会出现明显的垂荡—横摇、垂荡—纵摇耦合响应,继而诱发较大的垂向运动,这种现象被称为马修不稳定效应(Mathieu instability)[19],也是一种参激振动响应。目前立柱型浮式风力机主要用于水深超过80 m的海域,世界上第一个商业化漂浮式风电场Hywind Scotland 即采用该种类型风力机。
1.2 半潜型浮式风力机
半潜型浮式风力机多为三立柱或四立柱型结构[20],立柱底部一般设计有垂荡板,并设置压载舱,通过调整各压舱程度来实现合理的重力、浮力分布,半潜型浮式风力机系统一般重心会高于浮心。半潜型浮体一般水线面面积较大,在浮体产生倾斜时能够提供较大的摇动回复力矩,使得横摇及纵摇的稳定性较好。但同时也由于其浮体尺度的增大,使得在同等海况下所受的波浪载荷更大。半潜型浮式风力机的特性动力问题是对低频波浪荷载较为敏感,二阶低频慢漂响应是该类型浮式风力机需要重点关注的问题[21]。半潜型浮式风力机适用水深范围较广,是最适合中国海域的基础形式,中国目前研发浮式样机都采用了半潜型的技术路线。
1.3 驳船型浮式风力机
驳船型浮式风力机与半潜型类似,部分学者会直接将其归为半潜式,其同样具有较大的水线面面积,但与半潜型相比其吃水更小,驳船型的动力响应特性也与半潜型类似,大水线面会导致受到的波浪荷载更大,对低频慢漂响应更为敏感。该类型的代表是法国的Damping Pool[22]浮式风力机概念,其设计理念来源于船舶减摇水舱和钻井船月池的设计,通过中间阻尼池和内部减摇水舱等手段增加阻尼,减少整体的运动响应,其纵、横摇固有周期一般在14 s左右,垂向运动固有频率一般在一阶波浪频率范围内,故波频响应较为敏感,设计时需要对平台运动进行频率优化。
1.4 张力腿型浮式风力机
张力腿型浮式风力机的设计理念与其他形式差异较大,最大不同在于浮体浮力要远大于重力,通过施加较大预张力的张紧式系泊来实现定位[23]。张力腿型的系泊系统使得浮体平面外运动响应(横摇、纵摇和垂荡)较小,但由于其对水平面内约束相对较弱,受到波浪和水流作用力后浮体会产生面内运动(横荡、纵荡和艏摇)。张力腿型浮式风力机垂向运动的固有频率要高于一阶波浪力频率范围,其特性动力学问题是对高频波浪荷载特别敏感[24-26],应重点关注波浪二阶和频及高阶非线性波导致的共振问题。张力腿型浮式风力机系泊系统用海面积小,平台面外运动小,利于上部风电机组的稳定运行和发电效率的提升,但张力腿技术门槛较高,一旦失效将造成风力机倾覆,目前该类型浮式风力机仍不成熟。
浮式风力机在不同自由度上运动响应的固有周期能够很大程度上反映设计理念和设计合理性,一般是动力学问题研究的首要关注点。表1给出了不同类型浮式风力机在不同自由度运动时的周期范围及其对应的特征动力学问题,可作为设计及研究参考。
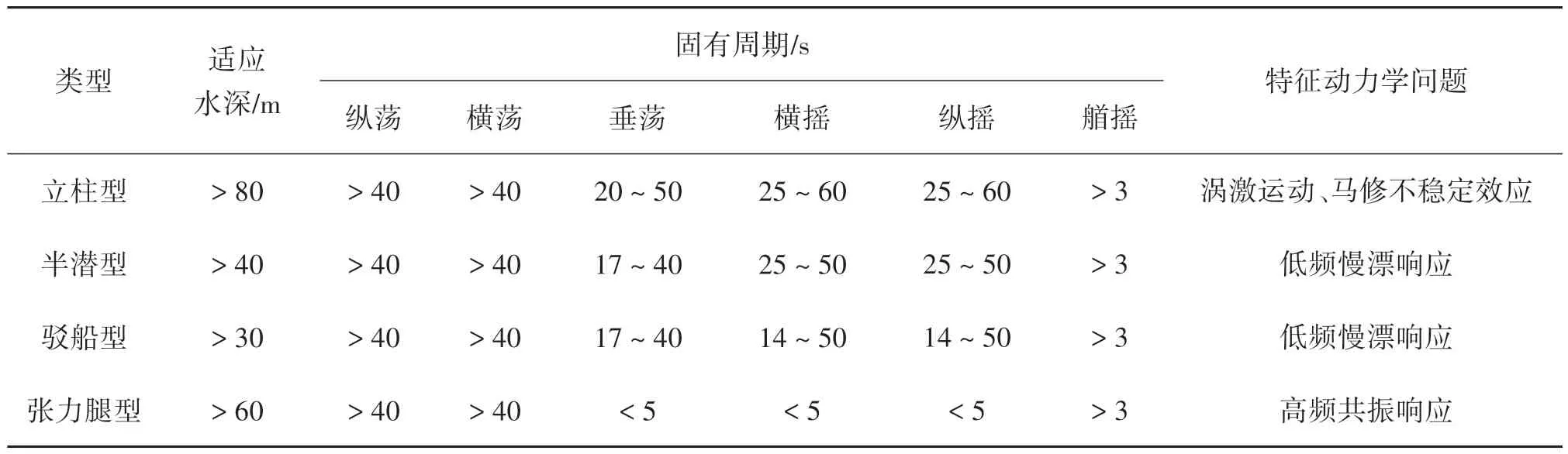
表1 典型浮式风力机平台固有周期范围[27]Tab.1 The representative natural periods of typical FOWT floating support structures
2 浮式风力机系统特征动力学问题
2.1 系统动力学方程
如图2所示,浮式风力机整个系统由浮式基础、上部风机、锚泊系统组成,在海水中受风浪流环境荷载和风电机组荷载作用,动力学分析涉及气动—水动—结构—伺服控制相互耦合。为简化分析,假设整个系统为刚体运动,此时其动力学方程可表示为:
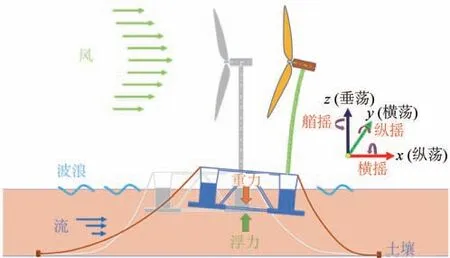
图2 浮式风力机多体耦合动力学示意Fig.2 Multi-body coupling dynamics of floating wind turbines
式中:M为浮式风力机系统质量矩阵;μ为附加质量矩阵;η为浮式风力机系统刚体运动位移矩阵;C为阻尼矩阵;K1为静水刚度矩阵;K2为系泊刚度矩阵;Fe为外荷载矩阵;ω为合外力作用频率,rad/s。其中,外荷载Fe可表示为:
式中:Fwind为风荷载;Fwave为波浪荷载;Fcurrent为流荷载;Fturbine为风电机组荷载。
在浮式风力机水动力研究中一般采用频响函数来反映浮体在海洋环境中所受外界激励荷载和动态响应之间的关系,频响函数可表示为:
其中,H即为频响函数,又称运动响应传递函数。
以上将漂浮式风力机系统简化为刚体运动,该种方法对于研究浮体运动响应、系泊锚链受力等具有重要意义,也是目前漂浮式风力机半耦合设计中常用的方法。但实际上浮式风力机是一个典型的刚柔多体耦合动力学系统,在该系统中,浮体的刚体运动、塔架和叶片结构的柔性变形、系泊锚链的张紧或松弛等同时出现,且相互耦合、相互作用,整个系统具有较强的非线性。如何建立刚柔多体耦合的动力学模型以及对模型进行求解是浮式风力机动力学问题研究的难点。目前,关于浮式风力机刚柔多体耦合动力学的研究已有一些研究成果,Likins[28]提出了混合坐标动力学模型,Chen等[29]基于卡尔丹角坐标系提出了旋转悬臂梁模型和多体运动传递模型,这些模型可较好地描述浮式风力机刚柔耦合多体动力学行为;而对于浮式风力机刚柔耦合动力学模型的求解目前也已开发出了相关的数值计算软件,如FAST、OrcaFlex、HAWC2 等。但这些模型及求解方法的准确性和计算效率仍存在较大的优化空间。
2.2 浮式风力机气动荷载
浮式风力机气动荷载是影响动力响应的重要因素,然而来流本身的复杂性以及叶片旋转、变桨、弹性变形、浮体运动等原因造成的绕流的复杂性导致气动荷载的准确评估非常困难。目前风力机气动荷载的计算方法主要有叶素—动量理论(BEM)、涡流理论(FVM)和计算流体力学(CFD)三种。其中,叶素—动量理论是最常用的方法[30],其基本思路是将叶素理论和动量理论相结合,叶片沿长度方向分成若干叶素,假设各叶素的荷载互不干扰,分别求解每个叶素的局部诱导速度,然后沿叶展方向将气动力进行积分。图3为叶素单元力学分析示意图,图中:CL、CD分别为升力系数和阻力系数;Ve-ip、Ve-op分别为叶片叶素局部运动的速度分量;a、a'分别为轴向诱导因子和切向诱导因子;φ为入流角;FL为升力;FD为阻力;α为攻角;β为桨距角;U∞为入射风速。
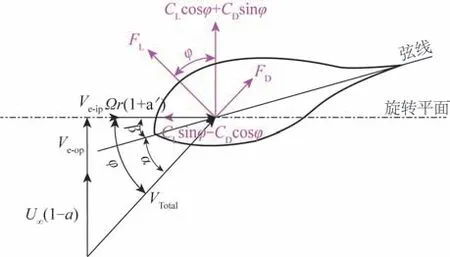
图3 叶素单元受力分析示意Fig.3 Mechanical analysis of the blade element
当叶片自身运动较小时,此时可以忽略叶片本身的运动,得到入流角、轴向诱导因子和切向诱导因子之间满足如下关系:
式中:Ω为叶轮转速,rad/s;r为叶素单元距轮毂中心的距离,m。当r=R时,
式中:R为叶轮半径,m;λR为叶尖速比。
当叶片自身运动较大时,在计算入流角时需要计入叶素局部运动速度,此时:
根据叶素—动量理论,可以得出距离叶轮中心r处宽度为dr的叶素单元上产生的推力和扭矩分别为:
式中:c为叶片剖面弦长,m;VTotal为入射风速与考虑叶轮旋转及叶素单元局部运动速度的合成风速,m/s。
叶素—动量理论用于计算风力机气动荷载简单有效,但同时也具有一些局限性。一是该理论是基于静平衡状态得出的,当轴向诱导因子a>0.4时,尾迹进入湍流状态,此时直接应用叶素—动量理论将会失效;二是当叶片发生平面外大变形时计算误差将增大。因此,近年来一些学者针对叶素—动量理论提出了较多的修正模型:Mikkelsen[31]基于大量试验测试,提出了旋翼推力系数修正方法;Buhl[32]引入了叶尖损失的修正系数;刘利琴等[33]对动态失速、风剪切以及塔影效应等进行了修正。此外,浮式风力机平台运动响应较大,其气动荷载计算的挑战还在于平台运动引起的相对风速的复杂变化,这种影响又称为动态入流效应,可能会导致负阻尼现象的出现,故当采用叶素—动量理论时还应增加一个动态入流模型的修正。
当然,除了最常用的叶素—动量理论外,也有一些学者采用涡流理论或CFD 方法来研究风电机组的气动荷载。涡流理论法是采用在叶片展向微段上布置马蹄涡代替叶片的计算方法,每个马蹄涡包括附着涡和尾涡,故该方法的关键是附着涡模型和尾迹涡模型的构建和处理。尾迹模型又分为固定尾迹模型、预定尾迹模型和自由尾迹模型[34],其中自由尾迹模型是通过求解整场诱导速度来确定尾涡模型,能够计算尾迹的畸变和卷起,是目前应用最广泛的涡流计算方法。Shen等[35]采用自由尾迹模型计算了浮式风力机在预设运动下的非定常气动荷载,Rodriguez和Jaworski[36]将自由涡尾迹与气动弹性算法相结合,模拟了浮式风力机与尾流的相互作用。此外,Greco 和Testa[37]建立叶片和尾流的三维数值涡模型并提出模型求解的面元法。CFD 方法是通过数值求解流体控制方程来实现流场的准确模拟,其中风力机建模、网格生成以及湍流描述是CFD 方法的核心。目前网格生成的方法主要有多重坐标系法、滑移网格法和嵌套网格法,而湍流模拟的方法主要有直接数值模拟(DNS)、大涡模拟(LES)和雷诺平均(RANS)3种,其中RANS是应用最广泛的方法,该方法中常用的湍流模型包括S-A、k-ε、SST k-ω等。CFD方法的优点在于计算精度高,但对计算资源要求较高且耗时较长,通常在学术研究中应用较多,如:Liu 等[38]基于开源CFD 工具箱OpenFOAM 研究了OC4 半潜浮式风力机气动荷载对平台运动、系泊响应的影响以及平台运动对风力机气动性能的影响;Li 等[39]对CFD方法计算气动荷载的计算域尺寸、网格划分策略、时间步长等进行了详细论述;Fu等[40]采用CFD方法对浮式风力机在俯仰运动下的气动荷载进行了分析。
2.3 浮式风力机水动荷载
2.3.1 水动力计算方法
浮式风力机水动力计算方法主要有势流理论法、Morison方程法以及两种方法的结合。其中势流理论法主要用于d/L≥0.2(d为结构特征尺寸,L为波长)的大尺度浮体结构,如浮式风力机浮体结构;而Morison 方程是一种半理论半经验公式,主要用于d/L≤0.2 的小尺度构件,如浮式风力机基础的横撑、斜撑、系泊链等。势流理论是假设流体为理想流体且无旋,流场的速度势ϕ满足拉普拉斯方程,即:
该方程为势流理论基本方程,当波浪传播过程中遇到浮体,波浪传播方向会改变,产生波浪绕射,而浮体在六自由度运动时也会对周围的流场产生影响,进而产生辐射速度势。当考虑规则波时,浮体所受的波浪力可以分为波浪激励力、绕射力、辐射力,其对应的速度势可以写为:
式中:ϕI为一阶单位波幅波浪下的激励速度势;ϕd为绕射势;ϕrj为六自由度的辐射势。
要想求解上述方程需要补充物面处、海底处、自由表面处、无穷远等处边界条件,具体求解原理可参考波浪力学的相关文献[41-42]。相比势流理论,Morison方程比较简单,其主要原理是考虑波浪对细长物体产生的拖曳阻力与惯性力。作用在圆柱体任意高度z处长度为dz的柱体上的波浪力可表示为:
式中:ux为来流速度,m/s;ρ为流体密度,kg/m3;D为柱体直径,m;CD为阻力系数,反映了流体黏滞效应,一般由试验测得;CM为惯性力系数。
需要注意的是Morison 方程在理论上是有缺陷的,其中流体拖曳阻力是按照黏性流体定常均匀流绕过柱体时对柱体的作用力分析得到的,而惯性力是按照理想流体有势非定常流理论分析得到的,两者没有共同的理论基础。虽然存在上述缺陷,但是目前还没有一个更好的方程能够取代它。多年的工程应用经验表明Morison方程尚能给出比较准确的结果,因此,其至今仍然是小尺度结构水动力计算的主要方法。
流体的黏性效应会对浮式风力机水动力计算的准确性产生影响。基于势流理论的水动力计算方法不能考虑流体的黏性,这往往会低估浮式风力机水动力荷载,若考虑黏性效应,一般需基于切片理论或基于模型试验得出附加阻尼系数对计算参数进行修正,或采用Morision公式修正后进行计算[43],这些方法往往涉及诸多假设或试验,分析结果有时会与实际有较大差异。关于黏性效应的影响:Clement等[44]研究表明黏性阻尼对浮式风力机垂荡、纵摇、横摇运动影响显著;Hallak等[45]采用附加阻尼矩阵法来考虑黏性阻尼力,但在计算精度方面并未做更深入的探索;程友良等[46]、曹淑刚等[47]证明了黏性效应对浮式风力机共振周期附近的响应值影响明显,在水动力计算时不可忽略。
2.3.2 非线性波浪荷载
如前所述,浮式风力机浮体波浪荷载计算通常采用势流理论,流场中的速度势函数满足拉普拉斯方程,函数求解满足自由表面边界条件、海底边界条件、物面条件、初始条件和辐射条件,根据物面边界条件和自由表面条件阶数的不同,可以分为线性理论和非线性理论。线性理论是指自由表面边界条件和物面条件的摄动阶次均为一阶,而非线性理论则为二阶甚至更高阶的阶次[48]。目前,对于规则波来说,线性波理论主要为Airy波理论,非线性波理论主要有Stokes波理论、椭圆余弦波理论、孤立波理论、流函数理论。线性波浪理论的速度和加速度解析解中只含有低阶项,而对于浮式风力机,长期服役于恶劣的外海环境,按照线性理论已不能满足对其水动力性能的预测精度。实践证明,结合非线性二阶波浪作用后的计算模型能够较好地改进波浪和结构之间的相互作用,使预测更接近实际,故目前工程计算中一般至少需要考虑到二阶波浪力[49-50]。二阶波浪力一般通过数值或试验方法来得到,但由于其理论体系尚不完善,诸多学者还在探讨更准确有效的计算方法。二阶波浪力由定常项、合频项与差频项3部分合成,水平方向的定常力又被称为平均漂移力[51],其大小正比于波高的平方,主要由浮体对波浪绕射作用产生。二阶波浪力的数值求解方法有远场积分法、近场积分法和中场积分法[52]。远场积分法是根据流域中能量和动量守恒方程得到浮体在规则波中的平均二阶波浪力,该方法在远离浮体的控制面上进行积分,计算简便,且比近场积分法更加准确,但该方法只能给出二阶力中的定常部分。近场积分法是通过瞬时物体表面水动压力积分求得二阶力在各个坐标轴上的分量,该方法能够计算定常、低频和高频二阶力,但计算相对复杂且耗时。中场积分法首先在浮体附近建立一个控制面,然后利用斯托克斯公式和高斯公式,将近场积分法中对物面的积分转化成在控制面及平均水线面上的积分,这一方法避免了浮体表面网格划分对速度势求解精度的影响,并能够计算定常、低频、高频二阶力,具有较好的数值稳定性。欧绍武和付世晓[53]对远场法、近场法和中场法进行了总结,基于HydroStar 软件分析了网格密度、浮体形状、水深对二阶波浪力的影响,得出远场法具有较好的数值稳定性,而近场法受网格密度、浮体形状等因素影响较大。二阶波浪力中的低频成分通常是悬链线式系泊浮体关注的重点,低频波浪力的计算可以采用近场积分法或中场积分法来求解完整的二阶传递函数矩阵,又称全QTF法,该方法需要求解二阶速度势,求解过程极其耗时,为提高效率,工程中常使用Newman 提出的利用定常二阶力近似低频二阶力的方法,该方法称为Newman 近似法,Newman 近似在频率较低时与全QTF 法计算结果会比较接近,但在频率较高时可能会存在一定的误差。
浮式风力机一般有悬链线式系泊和张紧式系泊,不同系泊方式对波浪力不同成分的敏感性也不同。对于半潜型和驳船型浮式风力机一般采用悬链线式系泊,此时二阶波浪荷载中的差频成分对浮体运动及系泊力的影响较大;而对于张力腿型浮式风力机采用的是张紧式系泊,此时二阶和频甚至更高阶波浪荷载对其系泊及浮体运动的影响更为敏感;对于立柱型浮式风力机,周涛等[54]利用SESAM 软件计算二阶波浪力并利用FAST 软件对该浮式风力机系统进行时域耦合仿真,结果表明二阶慢漂力对立柱型浮式风力机垂荡运动有较大影响,且易激发较大的纵摇运动,并产生较大的锚缆张力。
在海洋工程中还有一种强非线性波叫畸形波,畸形波对海上结构物危害极大,研究浮式风力机在畸形波作用下的动力响应具有重要意义。关于畸形波的定义,Klinting[55]认为需满足以下3个条件:
1)畸形波波高与有效波高的比值不小于2,即Hmax/Hs≥2;
2)畸形波的波峰高与波高比值不小于0.65,即ηc/Hmax≥0.65;
3)畸形波与前后相邻的波峰高的比值不小于2,即Hmax/H1≥2、Hmax/H2≥2。
以上3个条件同时满足较为苛刻,实际工程中为保证海洋结构物的安全,通常认为满足条件1)即为畸形波。起初畸形波的研究主要集中在畸形波生成的数值模拟,近些年逐步过渡到畸形波对海洋结构物的作用[56]。Zhong 等[57]利用新波理论和随机海浪理论建立了畸形波入射波模型,研究发现畸形波对半潜平台运动响应和系泊缆动张力影响较大;李业成等[58]将含畸形波的随机波浪试验与一般随机波浪试验进行对比研究,结果发现半潜平台纵荡、纵摇的极大值以及波浪爬升与气隙的极大值受畸形波的影响显著增大,且畸形波增强了波浪爬升与气隙响应的非线性;常爽等[59]求解畸形波作用下张力腿平台动力响应,发现二阶畸形波会引起浮式风力机平台纵荡、垂荡和纵摇的大幅值运动。浮式风力机在畸形波作用下的动力响应是其动力学研究的重要内容,特别是对于台风多发的恶劣海域。
2.3.3 流荷载及涡激响应
浮式风力机结构中存在许多圆柱体结构,海流流过圆柱体时会产生一定周期交替变化的漩涡,漩涡会在圆柱体上产生交替变化的升力和阻力,当结构的某阶自振频率接近漩涡泄放频率时,结构就会产生共振,该现象称为涡激振动,浮式风力机的系泊缆或张力腿等柔线性结构中会出现涡激振动现象。而对于采用柱体建造的浮式风力机基础,在海流作用下由于柱体自身特征及流体黏性,柱体表面流体发生分离时会产生不连续的漩涡脱落,导致柱体表面压力发生不对称变化,激发柱体整体产生激励力,进而引起浮体发生刚体运动,这种响应称为涡激运动(vortex induced motion, 简称VIM)[60]。涡激运动在带立柱或浮箱的浮式风力机基础中都会产生,是浮式风力机重要的流固耦合动力学问题[61],特别是对于深吃水半潜浮式风力机以及Spar型浮式风力机。但截至目前对于浮式风力机VIM 的研究还比较少,大部分研究仍依靠数值仿真或试验方法进行:Liu 等[62]采用Fluent软件对OC4 半潜型浮式风力机进行涡激运动研究,分析了海流不同入射角度以及上下游立柱对涡激运动的影响,发现当锁频现象发生时流致涡激力会大幅度增加浮体运动响应;Duan等[63]采用1∶50 的缩尺比对Spar 型浮式风机进行水池试验研究,发现风浪对平台的横荡涡激运动有抑制作用。通过研究可知:流速、流向、流剖面、结构几何形状、附属构件都会对涡激运动响应产生影响,截至目前还没有成熟的涡激运动预报分析工具,相比而言模型试验被认为是较为可靠的方法。涡激运动研究的最终目的是找到抑制涡激振动的措施或对结构、系泊进行加强,保证浮式风力机的安全。
2.4 浮式风力机控制动力学
浮式风力机控制动力学技术主要包括基于伺服控制的机组运行控制和基于结构的减振控制。伺服控制包括变转速控制、变桨控制、偏航控制3 个方面。图4 所示为风力机控制原理图,根据风速及机组运行状态分为4个区域:当风速小于切入风速时(区域Ⅰ)风力机处于停机状态,此时桨距角一般为0°;当风速达到切入风速时(区域Ⅱ),风力机开始运转,并且随着风速增大输出功率逐渐增大,转速控制使风电机组始终处于最佳风能捕获状态,实现发电功率最大化,此时桨距角一般为1°~2°;随着风速继续增大到区域Ⅲ范围内时,风速处于额定风速和切出风速之间, 此时控制目标是通过主动变桨调节叶片桨距角, 使机组保持稳定的输出功率;当风速继续增大,超过切出风速时,机组进入停机控制区(区域Ⅳ),此时叶片调节至90°顺桨状态,机组停止运行。偏航控制比较简单,是风电机组根据风向对风进行调节的一种控制。上述控制调节在风电机组运行时实时发生并影响机组气动荷载,通过优化控制策略可进行气动降载。浮式风力机控制系统的挑战在于浮体存在大幅度运动响应,采用传统控制策略容易出现负阻尼效应[64],这种效应导致风力机输出功率波动或降低,甚至会引起其他共振问题,故一般浮式风力机需要开发专门的控制策略或对固定式机组控制策略优化后应用。Wakui等[65]针对Spar型浮式风力机开发了一种多反馈伺服控制系统,实现了通过变桨和变转速控制降低功率波动和俯仰运动的目的;Suemoto 等[66]证明了独立变桨能显著降低浮式风力机叶片荷载。除此之外,基于深度学习、多目标决策及鲁棒控制的技术也逐步被应用到浮式风力机控制策略中[67-68],这对于控制系统的改进和发电量的提升具有重要意义。更多关于半潜、Spar、TLP、驳船型浮式风力机控制系统的研究进展可参阅文献[69]。
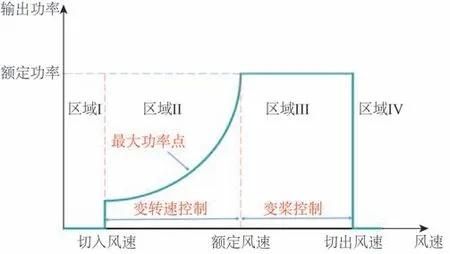
图4 风力机控制原理Fig.4 The control system for a wind turbine in a schematic diagram
基于结构的控制是高耸结构物常用的减振控制技术,对于浮式风力机主要通过增加额外阻尼器,调节塔筒结构振动和浮体运动响应来实现降低浮式风力机荷载的目的。其中基于调谐质量阻尼器(TMD)的控制技术在浮式风力机结构控制中应用最为广泛,其最早是由Lackner 和Rotea[70]研究并应用于驳船型浮式风力机。随后,Park 等[71]、金鑫等[72]诸多学者对TMD 控制技术进行了研究和仿真模拟,并在TMD 基础上发展了多种结构减振控制阻尼器。如Fitzgerald 等[73]提出了主动调谐质量阻尼器(ATMD),Hu 和He[74]提出了混合质量阻尼器(HMD)并进行了试验研究,Tian 等[75]提出半主动调谐质量阻尼器(SATMD)等。虽然以TMD为代表的结构控制阻尼装置能够有效降低结构振动和浮体运动,但也存在诸多挑战,如:TMD 附加质量大、行程远,可能会对浮式风力机的重心高度和内部空间布置产生影响;再者TMD 是一种线性系统,控制频带窄,往往只能在设计频率附近产生较好的抑振效果。故目前基于TMD技术的优化仍是浮式风力机结构控制的研究热点。除此之外,其他类型的阻尼控制技术也在浮式风力机中广泛应用,如著名的WindFloat 主动调载控制技术[76]、Nazokkar 和Dezvareh[77]研发的半主动液柱气体阻尼器(SALCGD)控制技术等,这些控制技术虽然原理不同、形式多样,但目的都是为了提高浮式风力机整体稳定性,降低结构振动和机组荷载。
2.5 浮式风力机结构动力学问题
浮式风力机涉及到的结构动力学问题主要包括叶片结构动力学、塔架结构动力学、系泊结构动力学以及他们之间的相互耦合[78]。浮式风力机叶片是捕获风能的主要结构,是一个展向长、弦向短的细长弹性体,除受气动荷载外,在运行过程中还面临偏航、变桨、变速等机械操作,受力比较复杂,是一个极易发生振动的气动弹性部件。叶片振动形式有挥舞、摆振和扭振3种,3种振动与气动力耦合形成风力机的气动弹性问题。叶片结构动力学模型包括等效梁模型(EBM)、有限元模型(FEM)和多体动力学模型(MBD)3 大类,3 类模型可不同程度地反映挥舞、摆振、扭振之间复杂的弹性和惯性耦合关系,将叶片气动荷载计算模型与结构模型进行组合可得到不同的气动—弹性耦合模型,如BEM-FEM 模型、BEM-EBM 模型、CFD-MBD 模型等,考虑到计算精度和效率,结合叶素动量理论和等效梁模型的气动—弹性模型(BEM-EBM)是应用最广泛的模型。塔架结构动力学问题主要指塔架固有特征及其动力响应分析,同时还应关注风致涡激振动引起的塔架螺栓松动及结构疲劳问题。系泊动力学问题是传统海洋工程问题,目前应用比较多的分析理论有悬链线理论、集中质量法以及细长杆理论。其中,悬链线理论主要用于悬链式系泊,该理论仅考虑浮体定常运动和慢漂运动,忽略浮体波频响应以及系泊线本身受浪流的作用,由悬链线方程或受力—位移曲线来分析系泊系统的动力学行为。该方法虽然存在误差,但计算简单快捷,在项目初期评估时被广泛采用,但由于忽略了锚链的惯性力和拖曳力,在极端海况以及系泊锚链固有频率与波浪谱峰频率接近时往往会低估系泊力。集中质量法是将系泊线简化为无质量的弹簧与集中质量点的方法,其求解通常采用有限差分法,该方法数学模型简单,易收敛,在一些商业软件如OrcaFlex 中被广泛应用,但该理论同样不适用于张紧式系泊。细长杆理论是由Garrett[79]提出,是一种基于有限元方法的理论模型,并在后续发展形成了弹性细长杆理论[80],该理论计算精度高,且能够对人工合成材料、张紧式系泊等多种情况进行模拟,是目前系泊系统动力分析中最具优势的分析理论,对于深水系泊需要采用该理论。
浮式风力机结构动力学最大难题是气动—水动—结构—控制多体耦合模型(图5)的建立及其动力响应求解,浮体的刚体运动与塔架、叶片的柔性变形同时出现且相互作用,具有较强非线性特征,属于典型的刚柔耦合多体动力学问题。Roach 等[81]、Zhang 等[82]、Ramzanpoor 等[83]分别采用数值软件FAST、AQWA、SIMA等对浮式风力机进行多体耦合建模和动力学分析;Yang 等[84]、Al-Solihat 和Nahon[85]通过试验方法对浮式风力机多体耦合动力响应进行了研究。虽然诸多学者对浮式风力机气动—水动—结构耦合问题进行了大量研究,但大部分模型在气动荷载计算精度、非线性波浪荷载处理、多体运动耦合计算方面都存在一些问题,导致目前浮式风力机一体化设计仍存在困难,截至目前,提高浮式风力机在复杂风浪环境下耦合动力响应的预测精度和计算效率仍是一项极其重要的工作。
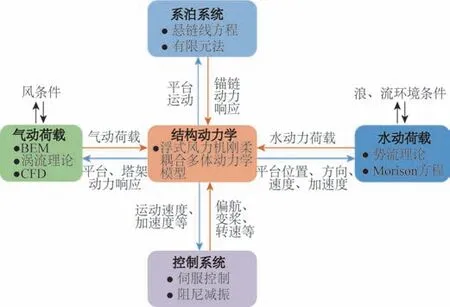
图5 浮式风力机耦合动力学模型组成Fig.5 The coupling dynamic model of floating wind turbines
3 浮式风力机动力响应研究方法
3.1 模型试验技术
模型试验是浮式风力机动力响应研究最常用也最有效的方法。一般对新型浮式风力机都要进行模型试验测试。如图6 所示,模型试验通常在大型风浪水池中进行,其主要目的包括:1)得到并验证系统的阻尼等参数;2)验证数值计算的正确性;3)得到极端工况响应,发现一些特殊试验现象,保证系统安全。模型试验项目一般包括风力机气动载荷试验,静水衰减试验,白噪声试验以及风、浪、流单独或联合作用试验[86]。试验成果包括浮式风力机平台运动固有周期与阻尼、运动RAO、不同工况下的运动响应、机舱和平台加速度、锚链张力、波浪爬升高度等数据。
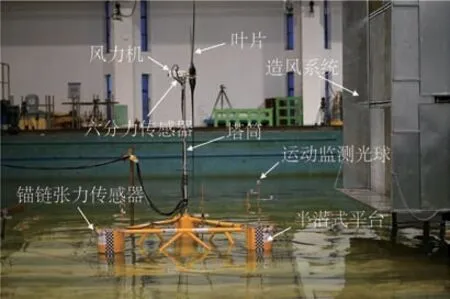
图6 浮式风力机水池试验模型及布置Fig.6 Model and layout of a basin test for a floating wind turbine
模型试验中模型的精确制作是最关键的一步,一般试验前首先需要确立相似准则,并根据试验条件及测试需要确定相应的缩尺比,进而制作各部件模型。浮式风力机模型试验应满足的相似准则包括[87]:
1)几何相似:LsLm=λ,其中,L为线尺度参数,s、m 分别代表原型和模型,λ为缩尺因子。试验中的线性尺度参数,如长度、型深、重心坐标、水深、波高及波长等,均须满足几何相似条件。
2)弗劳德数(Froude number)相似:VmgLm=VsgLs,表示模型与原型之间的重力和惯性力相似。其中V、L分别为特征速度(包括波浪水质点速度和风速等)、特征线尺度。
3)雷诺数(Reynolds number)相似:LmVmν=LsVsν,保证模型和实体之间惯性力和黏性力的正确相似关系。其中ν为流体的运动黏度。由于风力机的空气动力性能与空气黏性密切相关,因此满足雷诺数相似可以保证模型风力机与实体之间具有相同的空气动力学性能。
4)叶尖速比(λR)相似:ΩmRmVwm=ΩsRsVws,其中,Ω为风轮旋转角速度,Vw为来流风速,R为叶轮半径。满足λR相似可以保证模型与实体之间的风轮旋转速度和由于风轮转子不平衡所产生的系统激振频率以及塔影效应影响相同。
5)KC 数(Keuligan-Carpenter number)相似:VmTmLm=VsTsLs,保证模型和原型之间阻力和惯性力的正确相似关系,其中T为波浪周期。在满足弗劳德数相似条件下,KC数也同时满足。
6)斯特劳哈尔数(Strouhal number)相似:fmLmVm=fsLsVs,保证模型和原型之间涡激运动响应的正确相似关系。其中f为涡泄频率。
7)结构刚度相似:KmKs=λ,模型与原型之间结构刚度相似可以保证结构固有频率和变形相似。
根据以上相似准则可推导出模型与原型之间关键物理量的比尺关系如表2所示。
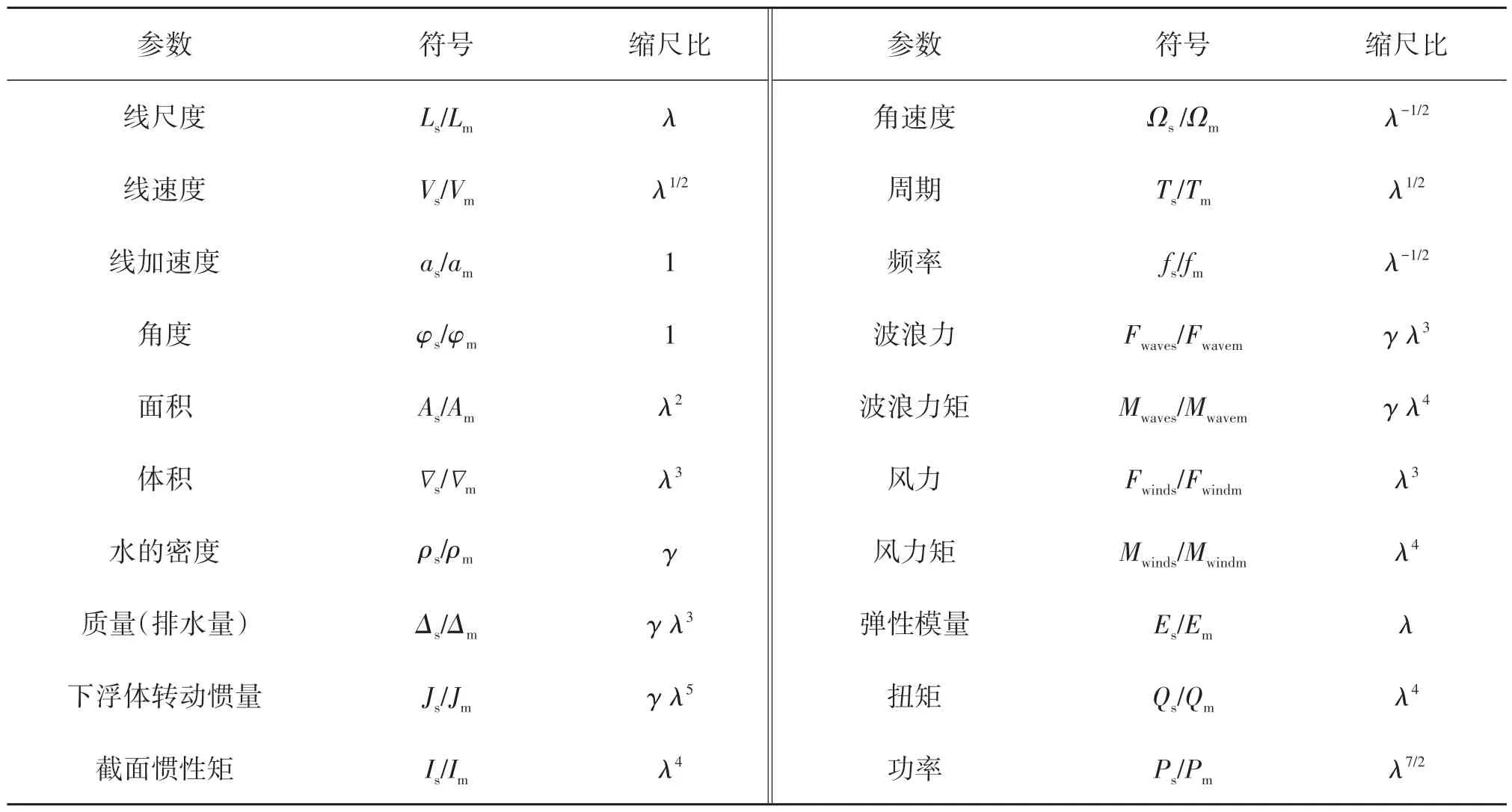
表2 浮式风力机模型试验原型与模型各种物理量的转换关系Tab.2 Scaling factors relating the model and prototype
实际试验中模型与原型无法做到全相似,考虑到机组载荷和环境载荷是动力响应的主要影响因素,正确模拟重力、惯性力和风轮推力对于预报浮式风力机耦合动力响应至关重要,因此一般首选弗劳德数相似。但在满足弗劳德数相似的条件下,雷诺数不能满足相似,由此造成二者力学性能上的差异称为“尺度效应”。尺度效应主要影响风力机气动载荷、下浮体及锚泊系统的黏性效应以及下浮体的涡激运动响应。
对于黏性效应,当浮体尺度足够大时其占比较小可忽略不计,但对于Spar 型浮体、张力腿型的张力筋腱,尺度效应会影响水池试验中涡激运(振)动响应的测试,此时建议在拖曳水池中单独开展涡激运(振)动试验。如何处理尺度效应对风力机气动荷载的影响是目前模型试验的重点和难点,截至目前,还没有一种可以实现无瑕疵模拟真实风力机气动性能的试验方法,常用的模拟风力机气动力荷载的方法主要有4种:
方法一:采用推力圆盘模拟气动推力。2009年,Cermelli等[88]在加州大学伯克利分校对半潜型浮式风力机进行了模型试验,为保证推力相似,上部采用圆盘模拟。推力圆盘可简单有效地模拟风力机的气动推力,这对于测试浮式风力机的整体运动和动态响应是比较关键的,然而,由于缺少叶片,推力盘不能模拟如空气动力扭矩、倍频力等其他空气动力载荷。
方法二:采用几何匹配的叶片进行气动力等效。风力机模型叶片不仅要求气动力相似,还要求转子引起的旋转载荷也要相似。早期的水池试验通常采用叶片几何相似的做法来满足上述要求。2005年,Hywind项目在Marintek 波浪水池进行的试验中首次使用了几何匹配的叶片[89]。2011 年,DeepCwind 项目[90]在MARIN 波浪水池中开展的模型试验同样采用了几何相似的叶片,但由于弗劳德数相似下雷诺数的降低,导致模型的气动推力达不到目标推力,为此,试验采用了提高风速的方法获得了目标推力。与推力盘相比,几何匹配叶片可以模拟更多气动载荷细节,如湍流风脉动和倍频力等,然而却不能精确地模拟气动力矩。
方法三:采用性能匹配的叶片进行气动力等效。在弗劳德数相似定律下,几何匹配的叶片雷诺数较小,导致风力机模型气动力性能降低,为此,Martin等[91]提出了使用低雷诺数翼型重新设计叶片模型的方法。重新制作性能匹配的叶片能满足在弗劳德数相似的情况下获得期望的气动力性能,同时在试验中可以模拟变桨控制系统,该方法是目前模型试验中最推荐的方法。
方法四:实时混合模型试验方法[92]。该方法将模型分为物理子结构和数值子结构。物理子结构是指试验测试的模型,而数值子结构是使用计算机进行数值模拟生成的。在每个时间步,从数值子结构导出的运动或力的命令通过执行器施加到物理子结构上,同时物理子结构测试的运动或力反馈到数值子结构,用于后续时间步的计算。该方法理论上可以利用数值计算生成更准确的气动荷载,但目前仍具有局限性:
1)目前气动荷载的数值模拟主要基于叶素动量(BEM)和广义动态尾流(GDW)理论,这些理论能够保证气动载荷一定的精度,但是,他们也包含近似理论和经验模型,其准确性往往取决于具体的应用条件,在条件不适宜时可能会导致错误。
2)为了满足试验实时性交互的要求,需要进行快速和高频计算,因此,在数值子结构中往往对模型进行简化处理,如将叶片视为刚体,尽可能减少叶片单元的数量,这会导致计算精度的降低。
3)湍流风场的生成缺乏全面可靠的数据,只能参考相关规范和经验,存在不确定性。
4)数值子结构中所采用的计算方法对时间步长要求严格,在试验中难以与物理模型匹配。
综上所述,当前模型试验仍然是研究浮式风力机动力性能的重要途径,但如何通过更合理的模型等效或试验方法来实现更准确的原型预测是模型试验需要进一步研究的方向,目前采用性能匹配的叶片进行气动力等效是模型试验中获得风力机气动力性能最为可靠且推荐的方法。
3.2 数值仿真及工具开发
数值仿真成本低、速度快、精度高,是浮式风力机动力学研究最普遍使用的方法。然而,浮式风力机涉及气动—水动—伺服—系泊—锚土耦合,具有较强的非线性,其分析理论涉及多学科交叉,如何建立精确有效的数值模型及模型动力学求解是数值仿真技术研究的重点和难点。
浮式风力机动力学数值模型可以归纳为结构动力学模型、空气动力学模型、流体动力学模型以及他们之间的相互耦合。频域法和时域法是浮式风力机数值计算常用的方法,通过频域法可以得到浮体关键水动力参数,包括附加质量、势流阻尼、幅频响应RAO、一阶波浪力传递函数、二阶波浪力传递函数等。频域计算时在随机波η作用下,浮式风力机所受的一阶及二阶和频、差频波浪载荷可表示为:
式中:F1(ω)为一阶波浪力传递函数(LTF);F2s(ω,ω)为二阶和频波浪力传递函数;F2d(ω,ω)为二阶差频波浪力传递函数。
典型浮式风力机数值仿真水动力模型如图7所示,其频域计算得到的二阶波浪力传递函数三维图如图8所示。频域法计算效率高,但无法准确仿真系统非线性特征,无法捕捉瞬态响应,难以实现浮式风力机多体耦合的精确分析,故对于复杂的耦合非线性的研究必须采用时域法,即通过生成代表性的海洋环境条件,并基于时间步进方法将其作用于浮式风力机多体耦合模型,最终得到每个时间步对应的动力响应,DNV 规范要求浮式风力机系泊分析必须采用时域方法[93]。
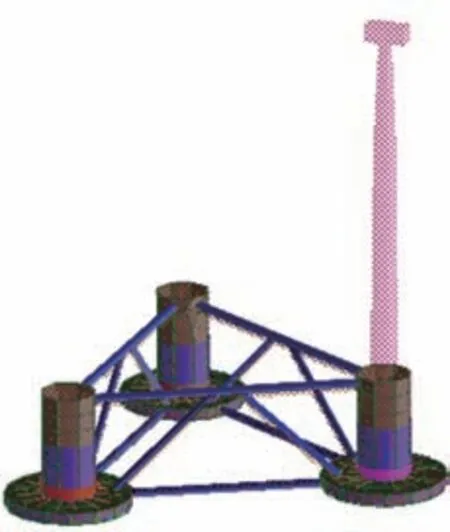
图7 浮式风力机水动力仿真模型Fig.7 Hydrodynamic simulation model for a floating wind turbine
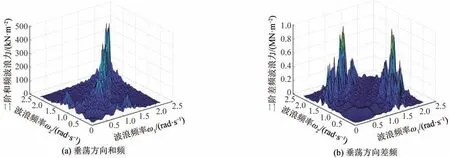
图8 典型频域方法计算二阶波浪力传递函数[94]Fig.8 Calculation of second-order wave force transfer function using frequency domain method
在浮式风力机数值分析方面诸多学者已进行了大量研究。MIT 的Lee[95]对浮式风力机非线性波浪荷载数值计算方法进行了研究;Lupton[96]提出了将结构动力模型、空气动力模型、水动力模型以及伺服模型分别线性化再耦合计算的频域方法;Karimi[97]利用FAST 和WAMIT 开发了一种风力机—浮体—系泊耦合分析频域模型;Cui 等[98]基于双多流管模型、三维势流理论、悬链线理论研发了气动—水动—系泊耦合模型并对垂直轴浮式风力机进行了时域分析;此外,Hegseth 和Bchynski[99]、Karimi 等[100]以及Pegalajar-Jurado 等[101]也对浮式风力机数值计算模型进行了研究。但目前所有研究在处理气动荷载、多体耦合、非线性响应等方面仍存在许多不足。
随着浮式风力机各种数值模型的发展,部分模型被包装成利于使用的专业软件,其中,美国可再生能源实验室(NREL)开发的FAST(现为OpenFAST)[102-103]是浮式风力机动力分析使用最广泛的数值工具之一,包括气动模块AeroDyn、水动模块HydroDyn、控制模块ServoDyn、动力求解模块ElastoDyn 等,通过该软件可实现气动—水动—系泊耦合时域分析[104],并可模拟转速调节、偏航、变桨等行为。挪威科技大学工业和技术研究协会(SINTEF)开发的SIMA程序[105]也是常用的浮式风力机动力学分析工具,集成了SIMO和RIFLEX 两个模块,目前该程序已被DNV 融入到了SESAM 软件中,可成功调用SESAM 水动力计算结果,且可与著名的气动力软件Bladed[106]结合使用。Orcina开发的OrcaFlex[107]是另一款海洋工程时域分析工具,该工具开发之初需借助FAST进行风力机气动荷载计算,近年来该软件做了较大升级,目前已具有了控制模块和气动力计算的功能,可独立进行浮式风力机耦合动力分析。丹麦技术大学(DTU)开发的HAWC2[108]也是浮式风力机动力学求解的一款较好软件,但其水动力模块只内置了Morison 方程,对于大型浮体需要调用外部水动力荷载和系泊荷载。此外,还有挪威NTNU 大学[109]研发的AeroDyn/SIMO/Riflex,胡志强[110]研发的DARwind,Yang等[111]开发的FAST2AQWA以及CAT4IFES等都是可用于浮式风力机耦合动力学仿真的工具。为便于了解不同工具的特点,表3对常见的浮式风力机数值软件及其采用的基本理论进行了统计,可以看出大部分工具采用的理论比较类似,然而它们在时域模型建立时也几乎都需要来自频域求解器的输入,即在时域分析前需首先进行频域分析。常用频域分析工具有WAMIT、AQWA等,通过频域求解辐射、衍射问题得到相关动力学系数后传递到时域工具即可进行时域计算。

表3 浮式风力机系统动力学求解软件汇总[10,110,112]Tab.3 Numerical software for solving dynamic response of floating wind turbines
数值仿真工具的计算精度和效率是人们关注的重点,为此诸多学者和机构开展了大量不同软件之间以及软件与物模试验之间的对比研究。比较知名的是国际能源署(IEA)资助的OC3~OC6项目[4-7],其中OC3和OC4项目对不同理论及不同软件的计算结果进行了比较,发现在波频范围内对于半潜风力机采用势流理论与采用Morison方程具有类似的结果,但是势流理论计算的俯仰运动响应大于Morison公式法计算的结果,而采用Morison 公式法计算的黏性力要大于采用等效阻尼矩阵法的结果;同时发现,不同软件在计算浮体平均漂移力和二阶慢漂响应时存在较大的差异。OC6 项目[113]对软件计算结果与物模试验结果的差异进行了研究,发现大多数数值软件对极端荷载和疲劳荷载有所低估,数值软件非线性差频荷载计算不准确导致浮式风力机纵荡和纵摇自由度的低频响应及在固有频率附近的非线性响应被低估,推测是由于仿真工具缺少准确预测非线性以及低频荷载所需的一些物理参量造成的。
随着计算机软硬件性能的提高,近年来基于CFD 的数值仿真技术也在浮式风力机动力学研究中广泛应用,如:Tran 和Kim[114-115]基于CFD 和面元法开发了浮式风力机耦合动力求解程序;Cheng 等[116]、Cheng 和Wan[117]基于CFD开源工具OpenFOAM 和重叠网格技术开发了naoe-FOAM-SJTU用于浮式风力机耦合动力学求解。CFD 技术主要是通过对流体运动基本控制方程(Navier-Stokes方程)进行直接求解或模型化求解得到流场及结构响应相关信息,研究发现CFD 法能够更准确地预测浮式风力机在纵荡和纵摇自由度的载荷[112,118],为此可根据CFD 结果对软件工具进行进一步的优化改进。虽然CFD 技术能够提供精度较高的结果,但在浮式风力机动力分析方面还有很多问题有待解决,如CFD 仿真存在成本高、周期长及计算结果不确定性大等问题。
通过研究可以发现目前浮式风力机动力学数值分析方法还不甚完善,大部分工具的动力学模型基本都采用了简单的强行界面耦合法或迭代计算法,这些方法无法准确反映浮式风力机多体耦合及流固耦合的本质,故对于浮式风力机全耦合数值模型的开发及优化仍具有必要性。另一方面对于气动荷载、非线性波浪荷载计算程序的优化及精度提高也是下一步的研究重点。考虑到数值方法与物理模型试验的优缺点,在很长一段时间内数值仿真结合物模试验的方法将是浮式风力机动力响应研究的主要方法。
3.3 漂浮式样机与设计规范
浮式风力机样机测试是通过在原型样机上布设传感器直接测得各组成动力响应的方法。一般浮式风力机在大规模推广前都要通过树立样机对其运行状态进行测试和分析。样机测试成本高且存在一定风险,故样机设计时一般都需经严格的数值仿真或模型试验对其动力特性进行研究。世界上第一台浮式样机是2009 年的Hywind Demo 样机,该样机采用单柱式平台,测试机组为2.3 MW,经过数年运行监测,得到了一手数据,验证了技术可行性,最终以该样机为基础的6 MW浮式风力机于2017年被应用于Hywind Scotland风电场。与此类似,2011年Principal Power在葡萄牙开展了半潜型浮式风力机样机测试,该样机采用Windfloat主动调载技术,浮体为带垂荡板的三立柱结构,采用2 MW Vestas 机组,测试时间为5 年,期间根据测试结果对原设计进行了多轮技术优化和迭代,2019 年以该样机为基础的单机8.3 MW 的浮式风力机在葡萄牙实现商业化应用。日本在2013—2016年也开展了浮式风力机样机测试项目,其在福岛先锋项目中安装了3台基础不同、容量不等的浮式样机。近几年,中国也逐步开始了浮式风力机样机试验,2021 年,中国“三峡引领号”半潜型浮式风力机下水,开启中国漂浮式样机元年,之后“扶摇号”、“海油观澜号”也分别于2022 年和2023年相继下水,目前还有龙源电力集团股份有限公司的“国能共享号”以及明阳智慧能源集团股份公司的“OceanX”双转子浮式样机项目也在建造中,预计将于近期下水。除此之外其他国家相关研究团队也进行了大量样机测试工作,表4 汇总了目前全球主要的漂浮式海上风电项目。浮式风力机样机测试能够获得实际海况下样机运行数据,可直接验证技术的可行性,并为浮式风力机设计优化、发电量提升提供依据,但目前大多数的样机实测数据处于未公开状态。

表4 全球浮式风力机样机项目汇总Tab.4 Comprehensive overview of prototype projects for floating wind turbines worldwide
样机测试技术难点在于样机设计本身,样机设计一般做法是参考相关标准或规范进行,大部分规范会对浮式风力机组成、动力响应计算方法、工况校核标准进行详细介绍。目前比较有代表性的标准或规范主要有IEC 标准[119]、DNV 规范[93,120]、ABS 规范[27,121],近期中国船级社CCS 也发布了《海上浮式风机平台指南》[122]。由于目前浮式风力机运行数量较少,以上标准或规范尚不完善,不同规范之间也存在较大差异,部分规范更是直接借鉴海洋油气行业的做法,这导致浮式风力机设计过程中许多动力分析方法、参数取值、校核标准并不完全合理。以浮式风力机系泊设计为例,ABS规范借鉴了海洋油气领域规范《API RP 2SK》[123]的分析方法,只在输入和安全系数上做了调整,系泊分析时允许采用频域或时域的方法,系泊张力校核时采用的是单一安全系数法,直接将系泊张力与锚链破断强度进行比较,但与《API RP 2SK》相比环境重现期由100年降低为50 年,并分成了有冗余设计和无冗余设计两种情况,对生存工况下的衡准系数也由1.25 调整为了1.05。DNV 规范在其海工规范《DNV GL-OS-E301》[124]基础上做了较大修改,环境重现期由100 年降低为50年,海工规范《DNV-OS-E301》中允许采用频域方法或时域方法,而在浮式风力机规范,《DNV-ST-0119》[93]中只允许采用时域方法,系泊张力计算方法方面两个规范都采用抗力分项系数法,不同的是《DNV-OS-E301》采用锚链预张力与环境荷载产生的特征张力进行分项组合,而《DNV-ST-0119》采用的是平均张力与动态张力进行分项组合,其中平均张力是由锚链预张力、静态风、流力以及波浪漂移力产生,而动态张力是由波频和低频振荡产生的。目前DNV规范更多的考虑了浮式风力机本身的动力特征,在行业内认可度较高。中国浮式风力机技术发展较晚,目前CCS 发布的浮式风力机设计指导性文件还比较简略,其系泊分析直接指向了《海上移动平台入级规范》[125],且未对采用的环境重现期做出严格规定,分析方法接受频域或时域方法,系泊张力校核采用单一安全系数法,对风力机本身高耸结构、动力荷载长期循环等特征的考虑略显不足。从以上分析可以发现,浮式风力机相关的规范和标准还处于待完善和待验证阶段。浮式风力机与海洋油气分属不同行业、安全等级不同、失效后造成的后果也不同,直接借鉴油气行业的设计标准会造成设计不合理。浮式风力机设计时应根据所在海域及当地要求甄别选择适合的标准和规范。同时,也要充分利用样机测试数据对现有标准或规范进行校验和修订,以使其更好地指导浮式风力机的设计及研究工作。
4 结 语
经过数十年的发展,浮式风力机在理论、数值仿真及应用技术方面都取得了较大进展,但作为一种新兴技术,浮式风力机动力学具有机理复杂性和独特性,下一步仍需对其进行研究,研究方向可重点关注:
1)浮式风力机机组及基础的研发及优化。机组方面包括大型化浮式机组的研发,大型叶片结构、气动荷载的研究,控制策略的优化及降载技术的研究;此外,AI、大数据等新兴技术在机组研发中的应用,特别是在控制策略优化方面的应用也是机组研究的重要内容。浮式基础方面主要包括浮体的轻量化设计、混凝土等新材料的应用研究以及新型基础结构的水动力性能研究。此外,浮式风力机平台与波浪能、养殖网箱等的融合研究也是浮式基础研究的重要内容。
2)浮式风力机多场、多体耦合动力响应研究及数值工具开发。浮式风力机气动—水动—结构—伺服耦合动力分析难度较大,特别是气动荷载、非线性波浪荷载、流固耦合计算方法以及刚柔多体耦合模型的建立仍存在较大挑战。虽然已存在FAST、OrcaFlex、SIMA 等工具可实现浮式风力机耦合分析,但这些工具在模型建立时存在诸多近似或假设,在计算准确度和效率方面有较大优化空间,且目前国内尚无一款自主研发的一体化仿真工具,故耦合模型的研究及数值工具的开发将是中国浮式风力机领域亟需攻克的技术问题。
3)浮式风力机模型试验方法研究。由于模型试验无法实现全相似,导致预测精度存在差异,特别是模型气动荷载的等效方面目前还存在诸多难点,下一步浮式风力机模型试验方法的改进及预测精度的提高仍将是浮式风力机领域研究的重要方向之一。
4)浮式风电场级研究及系泊优化。不同于固定式海上风力机,浮式风力机运动响应对气动荷载更加敏感,浮式风电场内尾流效应对风力机运动及发电量的影响是未来需要研究的问题之一;此外,深海浮式升压站技术是浮式风电场规模开发需要面临的另一问题。系泊系统方面,目前中国浮式样机大多采用9根锚链,数量明显多于国外,下一步系泊系统优化及场级共享锚泊的研究将是重要研究内容之一。
这里对浮式风力机的分类特征、主要动力学问题及其研究方法进行综述,总结了浮式风力机空气动力学、水动力学、结构动力学、控制动力学相关理论及研究现状,并对气动荷载、水动荷载的计算方法以及二阶波浪力、畸形波等特殊非线性动力学问题进行了介绍,阐述了浮式风力机动力学研究的模型试验方法、数值仿真方法、样机测试方法。浮式风力机动力学问题复杂,这里仅对部分特征问题进行了介绍,以期为相关研究人员提供借鉴和参考,随着后续研究的不断深入,可以预见大规模漂浮式海上风电场将成为现实。
