医用床多功能结构设计分析研究
2024-03-10喻虹琳何泽新何晓芬
喻虹琳,何泽新,何晓芬
(贵州工程应用技术学院机械工程学院,贵州 毕节 551700)
医用床是一种能协助患者调整体位,促进患者恢复身体机能的机械设备,随着经济水平的发展,民众对医疗的需求迅速扩大,与此同时,人口老龄化进程加快,老年人常见病、慢性病的日常护理等医疗服务需求升级,需求的爆发将促使未来我国医用床市场快速增长。
1 医用床现有结构功能分析
我国医疗器械发展起步较晚,与发达国家相比,医疗器械行业的研发投入、创新能力、科技成果转化能力等方面相对薄弱。目前,我国市场上使用的医疗床技术含量相对较低,功能简单,制造粗糙。
第一类,单摇床结构,单摇病床由床头、床面、床架、护栏、单摇传动机构及脚轮组成。这类医疗床,较为传统,功能单一,症状较轻的患者可使用。第二类,多摇床结构,此类病床,除了具有基本单摇床的结构之外,其功能比单摇床复杂,适用于重症患者。第三类,电动医用床结构,电动医用床主要是以电动式液压传动系统为动力,由控制开关、调速阀和真空电磁阀构成主体的组合而成,根据电动式液压齿轮泵提供液压传动系统动力装置,调节各个双边油压缸的往复运动,并根据手柄按键调节手术床进行各种位置的转换,如调节、上下倾、前后左右倾、腰后背调节、移动固定不动等功能。
通过对以上三类常见医用床的分析,发现其主要存在的问题是功能结构单一,使用不方便。为解决这个问题,本文根据现有市场需求,设计一款功能较多,使用舒适的医用床。
2 医用床总体尺寸确定及其功能结构设计选型与分析
查阅资料,依据有关规范,确定本设计多功能医用床的总体尺寸为:如图1。

图1 多功能医用床总体结构
长×宽×高:2100mm×1000mm×600mm。
根据设计需要,确定总体结构,并对其内部重要功能机构,进行选型设计和坐标分析,主要包括支背结构、屈腿结构、侧翻结构和升降结构。
2.1 支背结构选型设计与坐标分析
支背结构是协助患者实现坐和躺动作的结构。如图2,1 为后侧面板,2 为可转动面板,3、4 为螺旋式连接。后面板1 和转动杠杆2 由转动轴线静止连接,转动轴线与床框架 O 点相连接,转动杠杆2 与螺旋连接件3 相互连接,并且螺旋连接件3 和4 构成螺旋对。螺钉4 与床框架0′是通过关节进行连接。操作时,螺钉3 延伸,使回转杠杆2 围绕O 点旋转,而回转盘则驱动背面面板进行支撑。

图2 支背结构
如图3 对支背机构运动进行坐标分析,设置后背板和床架铰接点O 为坐标系起点(0,0),X 轴为医用床水平方向,Y 轴为医用床竖直方位,创建直角坐标系mm。O′为电推棒与床上的关节,AO 为后板,BO 为转动盘,BO′为电控。a 是X 和后板之间的角度,而β 是X-和斜线00'之间的角度,Δ 是X-和电推进之间的角度,而θ 是转动杠杆的角度。该机构的主要座标为O 点、B 点和O′点,O 点是坐标的起点。床下室内空间、支背角度、e 取值等会影响B 点,因此基本设置B 点坐标(一60,一86),X1350。O′点的座标:受床下空间、支后角、电动推杆起始长度等因素的影响,从诸多方面来确定,O′座的座标(814,58),δ=178,β=40。
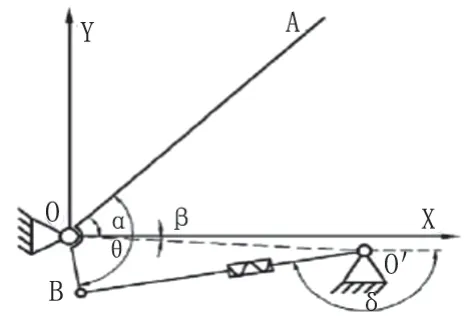
图3 支背结构运动坐标分析
2.2 屈腿机构选型设计与坐标分析
屈腿机构是一种可以协助病人屈膝、伸腿、协助病人进行腿锻炼的机械结构。其结构如图4,1 为腿部钢板,2 为小腿钢板,3 为腿部钢板,4 为可转动钢板。5 和6 为螺纹连接件。操作时,由螺旋式拉链5 延伸,旋杆驱动大腿板,腿板驱动腿部板链,使其进行弯曲动作。
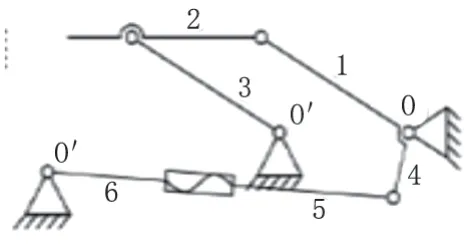
图4 屈腿机构
如图5 对屈腿机构运动进行坐标分析,将腿部和床身的关节O 设置为座标(0、0),X 轴是医用床的横向,Y 轴线是医用床的纵向,并设置了以mm 为基准的直角线。O′点是小腿支撑杆和床架的固接点,O″点是电动推杆和床架的铰接点,AO 是大腿板,AB 是小腿板,BO′是小腿支撑杆,CO 是转动板,CO″是电动推杆。α 是X 轴和大腿板夹角,β 是X 轴和斜杠OO″的夹角,δ 为是X 轴和电动推杆的夹角,θ 是转动杆夹角。该机构中O 点、A 点座标己知。O′、B 的功能是决定腿部的大小和部位。在各种条件下,初步确定了小腿支承板的大小为346mm、O′座标(-414、0)、B座标(-760,0)。初始设置C 点的座标(27、101),θ=105°。初始设置O" 的座标(-799,-58),δ 为3°,β 为4°。
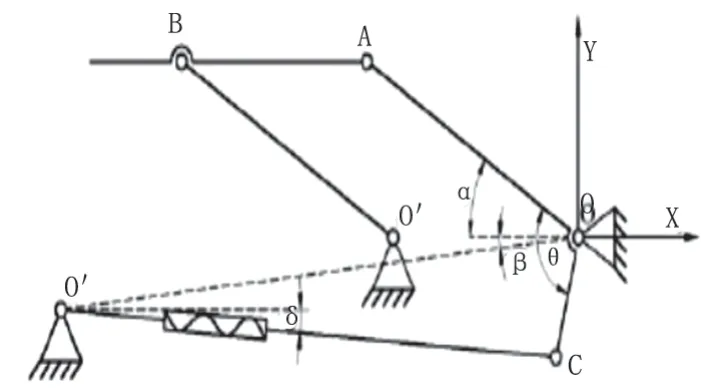
图5 屈腿机构运动坐标分析
2.3 侧翻机构选型设计与坐标分析
侧翻装置在防压伤方面效果明显,为了有效地对患者进行平稳的翻转,其调整度数需设置在60°以内。其结构如图6,1 是侧翻板,2 是滑块连杆,3 和4 是螺旋连杆。侧翻板一端和床板O 点固接,另一端和滑块连杆构成移动副,滑块连杆和螺旋连杆3 固接,螺旋连杆3 和4 构成螺旋副,螺旋连杆4 固定于床板O′点。工作时,螺旋连杆3 伸展推动滑块连杆顺着侧翻板下边的滑槽滚动,滑块连杆推动侧翻板绕O 点旋转,进行侧翻运动。

图6 侧翻机构
如图7 对侧翻机构运动进行坐标分析,设置了卧式翻转装置和床身框架的连接处O 作为座标(0、0),X 轴是护士床的横向方向,Y 轴线是护士床的纵向,并设置了以mm 为基准的座标。O′点是电动推杆和床板固接点,B 点是滑块的定位点,OB 是侧翻板,AB 是滑块曲轴,AO′是电动推杆。α 是X 轴和侧翻板夹角,β 是X轴和斜线OA 的夹角,δ 是x 轴和斜线00′的夹角。θ是x 轴和电动推杆的夹角。O′点坐标关键用于明确电动推杆的具体位置和长度,充分考虑各种因素,基本设置O′点坐标(-379,-463),θ=80°。A 点和B 点主要作用是明确滑块连杆的尺寸和部位,依据侧翻板尺寸明确B 点坐标为(-450,0),而AB 杆尺寸偏小时,电动推杆必须很大的行程安排才可以推动侧翻板进行0 ~60°调整,AB 杆尺寸偏大时,会造成电动推杆原始长短被缩小,无法进行正常的翻转作用,充分考虑各要素,明确A 点坐标为(-311,-91)。
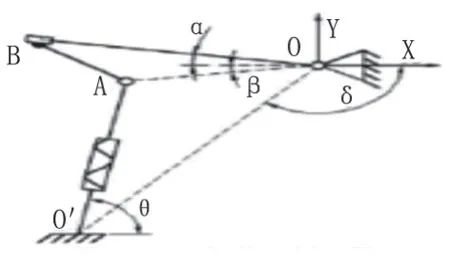
图7 侧翻机构运动坐标分析
2.4 升降机构选型设计与坐标分析
升降机构主要是使医用床起、落以及倾斜的装置。如图8,1 为底片,4 为滑动条。2,3,5,6 为螺杆组。在螺钉2、5 的拉长过程中,使底板1 起到提升的作用。在螺纹连接件2 不改变的情况下,使螺旋连接件5 延伸,使床的头部部位向上移动,从而实现了后倾的作用。相反,它可以实现前倾的作用。
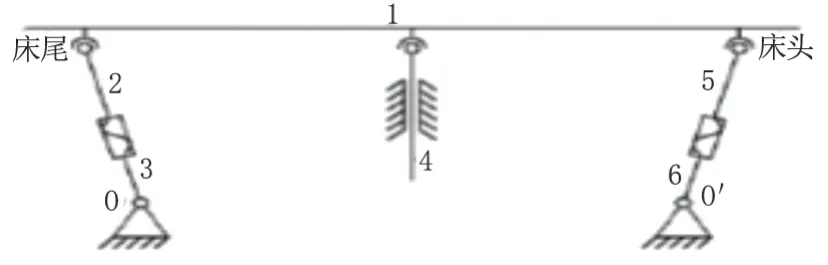
图8 升降结构
如图9 对升降机构进行运动坐标分析,设置床板的中心位置O 作为坐标(0、0),X 轴是医用床的横向,Y 轴线是医用床的纵向,设置了以mm 为基准的直角线。在原点上求取A、B、C、D 点的座标。这4 个座标分别决定2 个电推器的定位和起始长度,并且在考虑到护理台提升冲程(200 毫米)、装配间隙和载荷条件下,确定A 点座标(1000、-60)、点B 座标(-1000、-60)、C座标(-810、-455)、点D 座标(810、-455)。
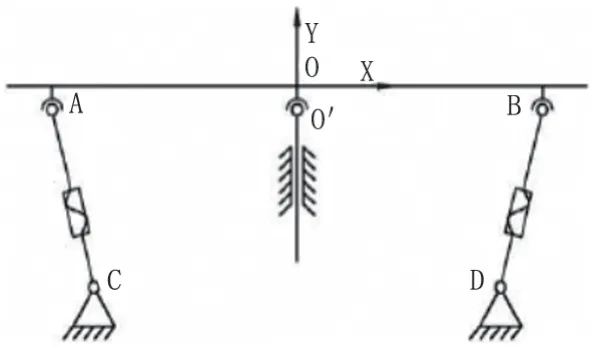
图9 升降机构运动坐标分析
3 结语
本文主要根据市场上医用床的种类及其结构性能进行分析,针对现目前医用床结构单一的缺点,对医用床的多个功能,如支背结构、屈腿结构、侧翻机构、升降结构进行了选型设计及其运动坐标分析研究。确定其多种功能结构,让医用床能够更方便的为病人服务。
